python实现简单的车道线检测
该案例通过阈值分割+区域掩膜的方式实现简单的车道线检测,内容主要包括两个方面:1. 设定阈值划分,2. 设定几何区域掩膜(该部分采用三角形区域划分),摄像头传感器一般固定于车体,故其视野范围可认为固定区域,具体实现如下.
demo:

图像读取
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
import numpy as np
# 读取image.
image = mping.imread("../data/loadline.jpg")
print(image.shape)
# 读取图像的分辨率shape,复制图片
y_size = image.shape[0]
x_size = image.shape[1]
color_select = np.copy(image)
line_image = np.copy(image)
设定阈值
red_threshold = 220
green_threshold = 220
blue_threshold = 220
rgb_threshold = [red_threshold, green_threshold, blue_threshold]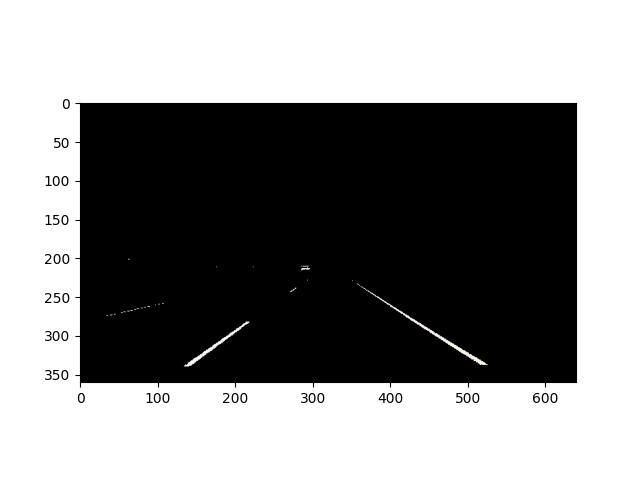
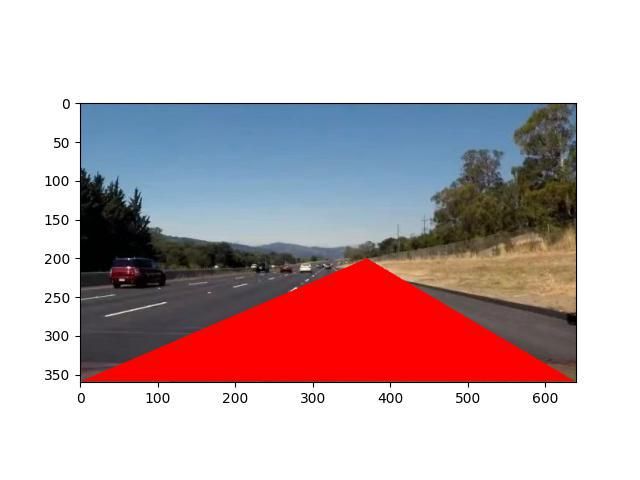
获取感兴趣的三角区域(也可定义为其他多边形区域)
left_bottom = [0, y_size-1]
right_bottom = [x_size-1, y_size-1]
apex = [370, 200] # 设定三角形顶点
# 绘制三角区域,通过一阶函数拟合的方式定义三条边
fit_left = np.polyfit((left_bottom[0], apex[0]), (left_bottom[1], apex[1]), 1) # 一阶拟合
fit_right = np.polyfit((right_bottom[0], apex[0]), (right_bottom[1], apex[1]), 1)
fit_bottom = np.polyfit((left_bottom[0], right_bottom[0]), (left_bottom[1], right_bottom[1]), 1)
阈值划分并锁定三角形区域
# 过滤低于阈值的像素
color_threshold = (image[:, :, 0] < rgb_threshold[0]) |\
(image[:, :, 1] < rgb_threshold[1]) |\
(image[:, :, 2] < rgb_threshold[2])
# 找到线内区域(获取坐标矩阵)
XX, YY = np.meshgrid(np.arange(0, x_size), np.arange(0, y_size))
region_threshold = (YY > (XX*fit_left[0] + fit_left[1])) &\
(YY > (XX*fit_right[0] + fit_right[1])) &\
(YY < (XX*fit_bottom[0] + fit_bottom[1]))
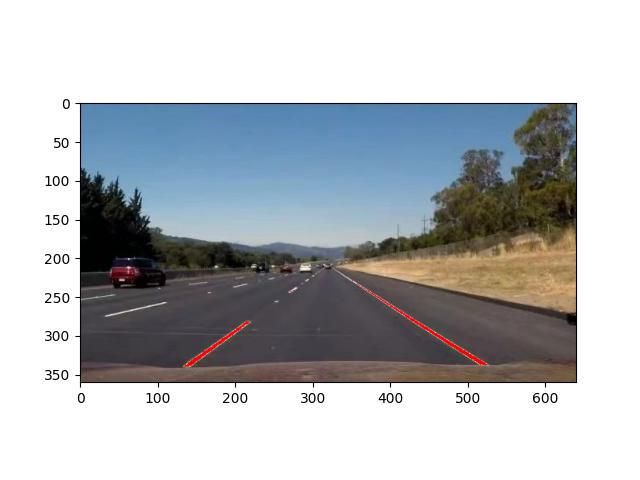
画图验证并保存
# 查找在感兴趣区域的着色部分
color_select[color_threshold] = [0, 0, 0]
# line_image[~color_threshold & region_threshold] = [255, 0, 0]
line_image[region_threshold] = [255, 0, 0]
# 画图验证
plt.imshow(color_select)
# plt.imshow(line_image)
plt.savefig("../data/result_2.jpg")
plt.show()