【不确定非线性动力系统的优化算法】【动态集成系统优化与参数估计(DISOPE)技术】DISOPE + MOMENTUM + PARTAN 算法提高非线性动态系统的收敛性研究(Matlab代码实现)
欢迎来到本博客❤️❤️
博主优势:博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
本文目录如下:
目录
1 概述
2 运行结果
3 参考文献
4 Matlab代码实现

1 概述
【不确定非线性动力系统的优化算法】【动态集成系统优化与参数估计(DISOPE)技术】DISOPE + MOMENTUM + PARTAN 算法提高非线性动态系统的收敛性研究研究涵盖化学加工工业、机器人、基因组学等应用。
动态集成系统优化与参数估计(DISOPE)技术是一种用于优化非线性动力系统的方法。它结合了动态集成系统、动量算法(Momentum)和基于神经网络的参数估计算法(PARTAN),旨在提高系统的收敛性和优化效果。
DISOPE技术的核心思想是通过动态集成系统对非线性动力系统的行为进行建模和预测,进而优化系统的参数和控制策略。该技术的基本步骤如下:
1. 动态集成系统建模:使用动态集成系统方法,建立非线性动力系统的模型。动态集成系统通过融合多个模型的预测结果,提供更准确的系统行为估计。
2. 参数估计与优化:使用基于神经网络的参数估计算法(如PARTAN),对动态集成系统的模型参数进行估计和优化。这些参数可以包括系统的内部参数、外部参数以及控制策略的参数。
3. 动量算法优化:引入动量算法(Momentum),作为优化算法的一部分。动量算法可以加速参数更新过程,增强算法在参数空间搜索的效率,并提高参数收敛性。
4. 优化与收敛性研究:通过实验和仿真研究,评估DISOPE + MOMENTUM + PARTAN算法在非线性动力系统的优化中的收敛性和优化效果。可以对比其他优化算法的性能,验证该算法的有效性和适用性。
总之,DISOPE + MOMENTUM + PARTAN算法是一种将动态集成系统、动量算法和基于神经网络的参数估计算法结合起来的方法,用于提高非线性动态系统的收敛性和优化效果。该算法的研究可促进对非线性动力系统优化方法的发展和改进。
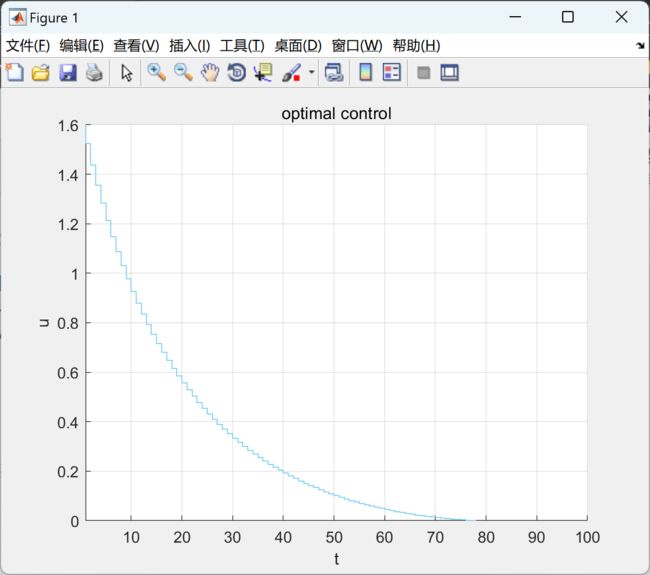
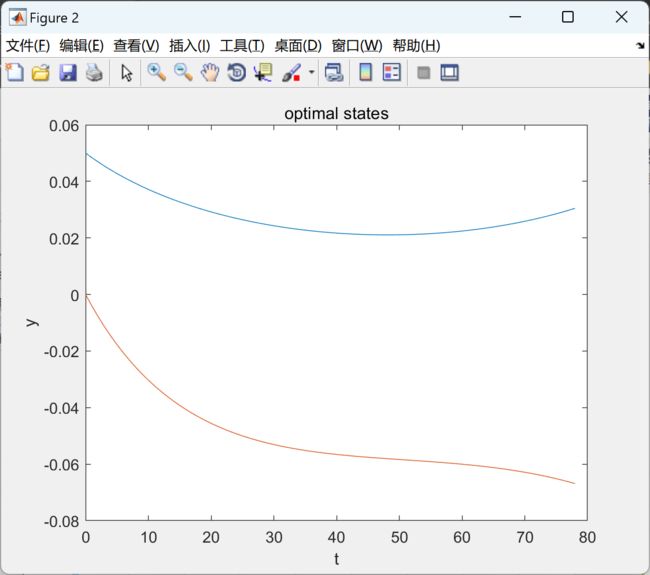
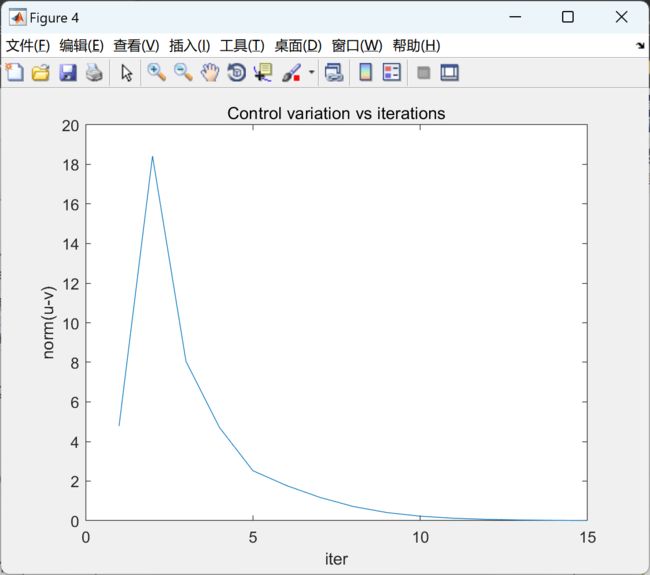
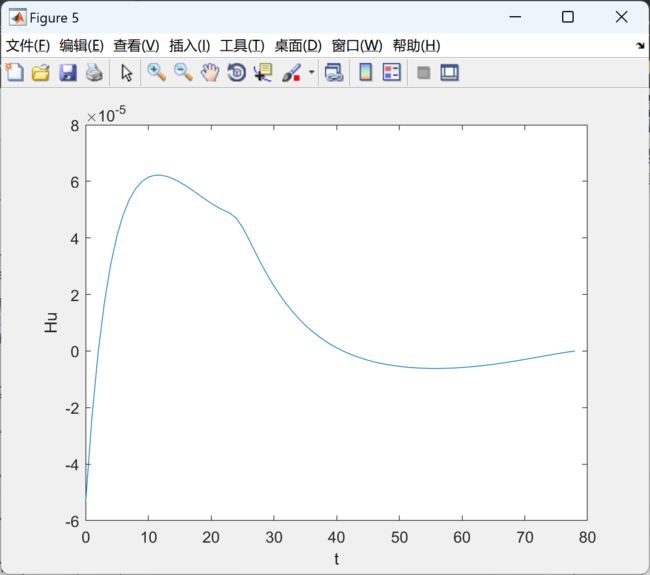
2 运行结果

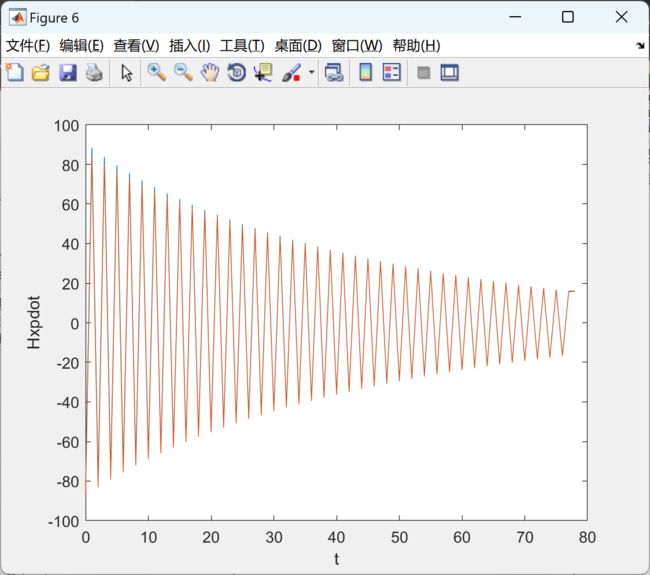

部分代码:
function [ sys ] = fstar( x, u, option )
% This function must be created by the user to define
% the dynamic system xdot = f*(x,u,t)
if option == 'value'
% return the value xdot from
% xdot = f*(x,u,t)
sys = zeros(2,1);
sys(1) = -(x(1)+0.25)+(x(2)+0.5)*exp(25*x(1)/(x(1)+2))-(1+u(1))*(x(1)+0.25);
sys(2) = 0.5-x(2)-(x(2)+0.5)*exp(25*x(1)/(x(1)+2));
elseif option == 'gradz'
% return the jacobian matrix of f*(x,u,k) with respect to x
sys = zeros( 2,2 );
h = [sqrt(eps); 0];
sys(:,1) = (fstar(x+h,u,'value')-fstar(x-h,u,'value'))/(2*norm(h));
h = [0; sqrt(eps)];
sys(:,2) = (fstar(x+h,u,'value')-fstar(x-h,u,'value'))/(2*norm(h));
elseif option == 'gradv'
% return the jacobian matrix of f*(x,u,k) with respect to u
h = sqrt(eps);
sys = (fstar(x,u+h,'value')-fstar(x,u-h,'value'))/(2*h);
elseif option == 'xinit'
% return the initial state conditons
sys = [ 0.05; 0 ];
% sys = [ 0.09; 0.09 ];
else sys = [];
end;
return;
3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]孔金生,万百五.非线性离散动态系统DISOPE方法及其收敛性分析[J].航空计算技术,2003(04):41-43.
[2]孔金生,万百五.基于算法参数、模型与模型参数优选的智能DISOPE方法[J].系统工程理论与实践,2000(10):10-16.
[3]李俊民,邢科义,万百五.基于线性时变模型的非线性动态系统最优控制DISOPE算法[J].应用数学,1999(01):94-99.
[4]孔金生,万百五.非线性离散动态大系统的DISOPE关联预测递阶算法[J].系统工程理论与实践,2000(12):77-83.