基于OpenCV和KinectSDK实现Azure Kinect DK实时获取RGB、深度图像及红外图像、交互式数据采集将图片数据保存本地
基于OpenCV和KinectSDK实现Azure Kinect DK实时获取RGB、深度图像及红外图像、交互式数据采集将图片数据保存本地
- 基于OpenCV和KinectSDK实现Azure Kinect DK实时获取RGB、深度图像及红外图像、交互式数据采集将图片数据保存本地
- 1.开发环境
- 2.采集效果图
-
- 2.1采集界面
- 2.2RGB图像
- 2.3 深度图像
- 2.4红外图像
- 3.深度图计算原理
- 4.代码主要函数及其功能
-
- 4.1配置并启动Kinect设备
- 4.2声明数据结构
- 4.3创建txt文件流
- 4.4 循环获取每一帧的图像
- 4.5数据格式转换
- 4.6通过捕获键盘进行交互式数据采集
- 5.完整代码
-
- 5.1头文件ShowDep_Color.h
- 5.2ShowDep_Color.cpp
1.开发环境
-Visual Studio2017
-Microsoft.Azure.Kinect.Sensor1.4.1
-OpenCV3.4.1
-关于VS2017配置OpenCV环境的详细过程可以参考我的上一篇文章:
链接: VS2017逐步配置OpenCV教程
2.采集效果图
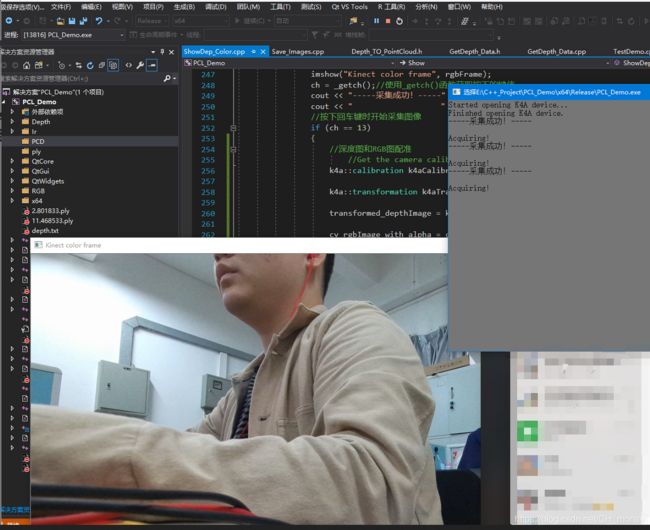
2.1采集界面
先上实际采集效果图,可以通过自定义按键控制其在Kinect视频流中交互式保存某一帧的彩色图、深度图、红外图数据,并将深度图的深度数据保存在ply文件中便于后续将开发。
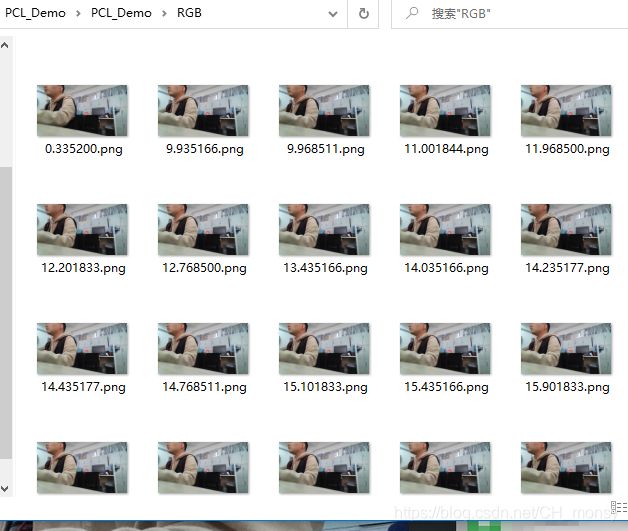
2.2RGB图像
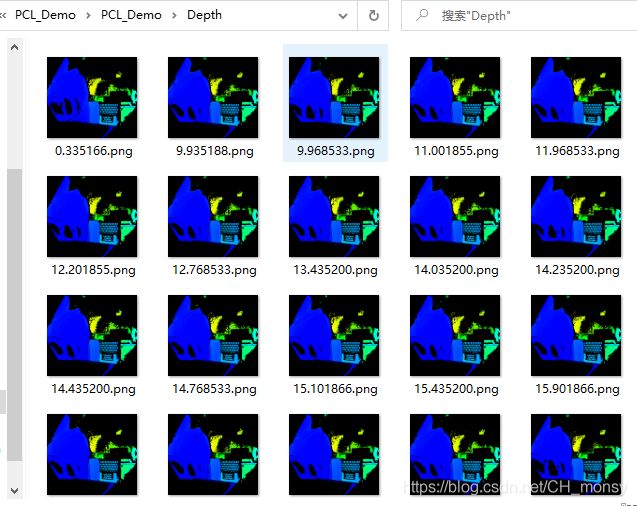
2.3 深度图像
2.4红外图像

3.深度图计算原理
这里列出几位大佬的文章,对于深度图的原理及计算方法讲解的非常详细:
链接1: 深度图像的获取原理
链接2: 有趣的深度图:可见性问题的解法
4.代码主要函数及其功能
4.1配置并启动Kinect设备
//这一代 Kinect 支持在一台电脑上打开多台 Kinect。可以用这句代码通过查询主机已连接的Kinet设备数来判断这台主机是否连接了 Kinect
const uint32_t deviceCount = k4a::device::get_installed_count();
if (deviceCount == 0)
{
cout << "未连接任何Kinect设备!" << endl;
}
//配置并启动设备
k4a_device_configuration_t config = K4A_DEVICE_CONFIG_INIT_DISABLE_ALL;
//设置Kinect的相机帧率为30FPS
config.camera_fps = K4A_FRAMES_PER_SECOND_30;
//设置Kinect的深度模式为Near FOV unbinned(这一代 Kinect 支持多种深度模式,官方文档推荐使用 K4A_DEPTH_MODE_NFOV_UNBINNED 和 K4A_DEPTH_MODE_WFOV_2X2BINNED 这两种深度模式)
config.depth_mode = K4A_DEPTH_MODE_NFOV_UNBINNED;
//设置Kinect的颜色属性为BGRA32
config.color_format = K4A_IMAGE_FORMAT_COLOR_BGRA32;
//设置color图的分辨率位 720p
config.color_resolution = K4A_COLOR_RESOLUTION_720P;
//为了同时获取depth和color图,保持这两种图像是同步的
config.synchronized_images_only = true;
cout << "Started opening K4A device..." << endl;
k4a::device device = k4a::device::open(K4A_DEVICE_DEFAULT);
device.start_cameras(&config);
cout << "Finished opening K4A device." << endl;
4.2声明数据结构
Kinect 表示图像(RGB / IR / Depth)的内置数据结构 k4a::image。同时使用 cv::Mat数据结构,以便利用 OpenCV 的imshow函数来实时示。
k4a::image depthImage;
k4a::image rgbImage;
k4a::image irImage;
k4a::image transformed_depthImage;
cv::Mat cv_rgbImage_with_alpha;
cv::Mat cv_rgbImage_no_alpha;
cv::Mat cv_rgbImage_8U;
cv::Mat cv_depth;
cv::Mat cv_depth_8U;
cv::Mat cv_irImage;
cv::Mat cv_irImage_8U;
//声明一个Kinect的capture
k4a::capture capture;
cv::Mat depthFrame;
cv::Mat rgbFrame;
cv::Mat irFrame;
4.3创建txt文件流
通过txt文件来存储已获取的图片数据的数量及名称
// An highlighted block
//写入txt文件流
ofstream rgb_out;
ofstream d_out;
ofstream ir_out;
rgb_out.open("./rgb.txt");
d_out.open("./depth.txt");
ir_out.open("./ir.txt");
rgb_out << "# color images" << endl;
rgb_out << "# file: rgbd_dataset" << endl;
rgb_out << "# timestamp" << " " << "filename" << endl;
d_out << "# depth images" << endl;
d_out << "# file: rgbd_dataset" << endl;
d_out << "# timestamp" << " " << "filename" << endl;
ir_out << "# ir images" << endl;
ir_out << "# file: rgbd_dataset" << endl;
ir_out << "# timestamp" << " " << "filename" << endl;
rgb_out << flush;
d_out << flush;
4.4 循环获取每一帧的图像
使用 dev.get_capture 函数得到 capture 对象,并设置一个 blocking 时间,表示每隔一个 blocking 时间就获取一次数据,如果这个时间设置为 0 ,表示不需要间隔时间,来一帧获取一帧,并通过相对应的函数来得到相对应格式的图像数据。
while (1)
{
if (dev.get_capture(&capture, std::chrono::milliseconds(0)))
{
k4a::image depthImage = capture.get_depth_image();
k4a::image colorImage = capture.get_color_image();
k4a::image irImage = capture.get_ir_image();
}
}
4.5数据格式转换
ColorizeDepthImage(depthImage,DepthPixelColorizer::ColorizeBlueToRed,GetDepthModeRange(config.depth_mode), &depthTextureBuffer);
ColorizeDepthImage(irImage,DepthPixelColorizer::ColorizeGreyscale,GetIrLevels(K4A_DEPTH_MODE_PASSIVE_IR), &irTextureBuffer);
colorTextureBuffer = rgbImage.get_buffer();
//从设备中获取每一帧的彩色图、深度图及红外图数据
depthFrame = cv::Mat(depthImage.get_height_pixels(), depthImage.get_width_pixels(), CV_8UC4, depthTextureBuffer.data());
rgbFrame = cv::Mat(rgbImage.get_height_pixels(), rgbImage.get_width_pixels(), CV_8UC4, colorTextureBuffer);
irFrame = cv::Mat(irImage.get_height_pixels(), irImage.get_width_pixels(), CV_8UC4, irTextureBuffer.data());
//将k4A定义的数据格式转换为OpenCV可显示的数据格式
depthFrame.convertTo(cv_depth_8U, CV_8U, 1);
rgbFrame.convertTo(cv_rgbImage_8U, CV_8U, 1);
irFrame.convertTo(cv_irImage_8U, CV_8U, 1);
//根据需求显示相应的输出窗口
//cv::imshow("Kinect depth map", depthFrame);
cv::imshow("Kinect color frame", rgbFrame);
//cv::imshow("Kinect color frame", cv_rgbImage_8U);
//cv::imshow("Kinect ir frame", irFrame);
4.6通过捕获键盘进行交互式数据采集
if (_kbhit()) {//如果有按键按下,则_kbhit()函数返回真
imshow("Kinect color frame", rgbFrame);
ch = _getch();//使用_getch()函数获取按下的键值
cout << "-----采集成功!-----" << endl;
cout << " " << endl;
//按下回车键时开始采集图像
if (ch == 13)
{
//深度图和RGB图配准
//Get the camera calibration for the entire K4A device, which is used for all transformation functions.
k4a::calibration k4aCalibration = device.get_calibration(config.depth_mode, config.color_resolution);
k4a::transformation k4aTransformation = k4a::transformation(k4aCalibration);
transformed_depthImage =k4aTransformation.depth_image_to_color_camera(depthImage);
cv_rgbImage_with_alphacv::Mat(rgbImage.get_height_pixels(),rgbImage.get_width_pixels(), CV_8UC4,(void *)rgbImage.get_buffer());
cv::cvtColor(cv_rgbImage_with_alpha, cv_rgbImage_no_alpha, cv::COLOR_BGRA2BGR);
cv_depth = cv::Mat(transformed_depthImage.get_height_pixels(), transformed_depthImage.get_width_pixels(), CV_16U,(void *)transformed_depthImage.get_buffer(), static_cast<size_t>(transformed_depthImage.get_stride_bytes()));
normalize(cv_depth, cv_depth_8U, 0, 256 * 256, NORM_MINMAX);
cv_depth_8U.convertTo(cv_depth, CV_8U, 1);
cv_irImage = cv::Mat(irImage.get_height_pixels(), irImage.get_width_pixels(), CV_16U,(void *)irImage.get_buffer(), static_cast<size_t>(irImage.get_stride_bytes()));
normalize(cv_irImage, cv_irImage_8U, 0, 256 * 256, NORM_MINMAX);
cv_irImage.convertTo(cv_irImage_8U, CV_8U, 1);
//save image
double time_rgb = static_cast<double(std::chrono::duration_cast<std::chrono::microseconds>(
rgbImage.get_device_timestamp()).count());
std::string filename_rgb = std::to_string(time_rgb / 1000000) + ".png";
double time_d = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
depthImage.get_device_timestamp()).count());
std::string filename_d = std::to_string(time_d / 1000000) + ".png";
double time_ir = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
irImage.get_device_timestamp()).count());
std::string filename_ir = std::to_string(time_ir / 1000000) + ".png";
imwrite("./RGB/" + filename_rgb, cv_rgbImage_8U);
imwrite("./Depth/" + filename_d, cv_depth_8U);
imwrite("./Ir/" + filename_ir, cv_irImage_8U);
k4a_image_t xy_table = NULL;
k4a_image_t point_cloud = NULL;
int point_count = 0;
double time_point = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
rgbImage.get_device_timestamp()).count());
std::string filename_point = "ply/" + std::to_string(time_point / 1000000) + ".ply";
k4a_image_create(K4A_IMAGE_FORMAT_CUSTOM,
k4aCalibration.depth_camera_calibration.resolution_width,
k4aCalibration.depth_camera_calibration.resolution_height,
k4aCalibration.depth_camera_calibration.resolution_width * (int)sizeof(k4a_float2_t),&xy_table);
create_xy_table(&k4aCalibration, xy_table);
k4a_image_create(K4A_IMAGE_FORMAT_CUSTOM,
k4aCalibration.depth_camera_calibration.resolution_width,
k4aCalibration.depth_camera_calibration.resolution_height,
k4aCalibration.depth_camera_calibration.resolution_width*(int)sizeof(k4a_float3_t),&point_cloud);
if (depthImage == 0)
{
printf("Failed to get depth image from capture\n");
}
generate_point_cloud(depthImage, xy_table, point_cloud, &point_count);
write_point_cloud(filename_point.c_str(), point_cloud, point_count);
k4a_image_release(xy_table);
k4a_image_release(point_cloud);
std::cout << "Acquiring!" << endl;
//写入depth.txt, rgb.txt文件
rgb_out << std::to_string(time_rgb / 1000000) << " " << "rgb/" << filename_rgb << endl;
d_out << std::to_string(time_d / 1000000) << " " << "depth/" << filename_d << endl;
ir_out << std::to_string(time_ir / 1000000) << " " << "ir/" << filename_ir << endl;
imshow("Kinect color frame", rgbFrame);
}
}
if (waitKey(30) == 27 || waitKey(30) == 'q')
{
device.close();
std::cout << "----------------------------------" << std::endl;
std::cout << "------------- closed -------------" << std::endl;
std::cout << "----------------------------------" << std::endl;
break;
}
5.完整代码
5.1头文件ShowDep_Color.h
#pragma once
#pragma once
#include <utility>
#include <k4a/k4a.hpp>
#include "Pixel.h"
#include<iostream>
#include<vector>
#include<array>
#include <fstream>
#include <chrono>
#include <string>
#include <math.h>
#include <sstream>
#include<k4a/k4a.hpp>
#include<k4a/k4atypes.h>
#include <opencv2/opencv.hpp>
#include<opencv2/core/core.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<pcl/io/pcd_io.h>
#include<pcl/point_cloud.h>
#include<pcl/point_types.h>
#include<pcl/visualization/pcl_visualizer.h>
#include "Pixel.h"
#include "DepthPixelColorizer.h"
#include "StaticImageProperties.h"
#include "k4a_grabber.h"
#include <conio.h>
#pragma comment(lib, "User32.lib")
#pragma comment(lib, "gdi32.lib")
using namespace std;
using namespace cv;
using namespace sen;
//宏
//方便控制是否 std::cout 信息
#define DEBUG_std_cout 0
namespace Show
{
void ShowDep_Color();
void create_xy_table(const k4a_calibration_t *calibration, k4a_image_t xy_table);
void generate_point_cloud(const k4a::image depth_image, const k4a_image_t xy_table, k4a_image_t point_cloud, int *point_count);
void write_point_cloud(const char *file_name, const k4a_image_t point_cloud, int point_count);
}
5.2ShowDep_Color.cpp
#include "ShowDep_Color.h"
void Show::create_xy_table(const k4a_calibration_t *calibration, k4a_image_t xy_table)
{
k4a_float2_t *table_data = (k4a_float2_t *)(void *)k4a_image_get_buffer(xy_table);
int width = calibration->depth_camera_calibration.resolution_width;
int height = calibration->depth_camera_calibration.resolution_height;
k4a_float2_t p;
k4a_float3_t ray;
int valid;
for (int y = 0, idx = 0; y < height; y++)
{
p.xy.y = (float)y;
for (int x = 0; x < width; x++, idx++)
{
p.xy.x = (float)x;
k4a_calibration_2d_to_3d(
calibration, &p, 1.f, K4A_CALIBRATION_TYPE_DEPTH, K4A_CALIBRATION_TYPE_DEPTH, &ray, &valid);
if (valid)
{
table_data[idx].xy.x = ray.xyz.x;
table_data[idx].xy.y = ray.xyz.y;
}
else
{
table_data[idx].xy.x = nanf("");
table_data[idx].xy.y = nanf("");
}
}
}
}
void Show::generate_point_cloud(const k4a::image depth_image, const k4a_image_t xy_table, k4a_image_t point_cloud, int *point_count)
{
int width = depth_image.get_width_pixels();
int height = depth_image.get_height_pixels();
//int height = k4a_image_get_height_pixels(depth_image);
uint16_t *depth_data = (uint16_t *)(void *)depth_image.get_buffer();
k4a_float2_t *xy_table_data = (k4a_float2_t *)(void *)k4a_image_get_buffer(xy_table);
k4a_float3_t *point_cloud_data = (k4a_float3_t *)(void *)k4a_image_get_buffer(point_cloud);
*point_count = 0;
for (int i = 0; i < width * height; i++)
{
if (depth_data[i] != 0 && !isnan(xy_table_data[i].xy.x) && !isnan(xy_table_data[i].xy.y))
{
point_cloud_data[i].xyz.x = xy_table_data[i].xy.x * (float)depth_data[i];
point_cloud_data[i].xyz.y = xy_table_data[i].xy.y * (float)depth_data[i];
point_cloud_data[i].xyz.z = (float)depth_data[i];
(*point_count)++;
}
else
{
point_cloud_data[i].xyz.x = nanf("");
point_cloud_data[i].xyz.y = nanf("");
point_cloud_data[i].xyz.z = nanf("");
}
}
}
void Show::write_point_cloud(const char *file_name, const k4a_image_t point_cloud, int point_count)
{
int width = k4a_image_get_width_pixels(point_cloud);
int height = k4a_image_get_height_pixels(point_cloud);
k4a_float3_t *point_cloud_data = (k4a_float3_t *)(void *)k4a_image_get_buffer(point_cloud);
//save to the ply file
std::ofstream ofs(file_name); // text mode first
ofs << "ply" << std::endl;
ofs << "format ascii 1.0" << std::endl;
ofs << "element vertex"
<< " " << point_count << std::endl;
ofs << "property float x" << std::endl;
ofs << "property float y" << std::endl;
ofs << "property float z" << std::endl;
ofs << "end_header" << std::endl;
ofs.close();
std::stringstream ss;
for (int i = 0; i < width * height; i++)
{
if (isnan(point_cloud_data[i].xyz.x) || isnan(point_cloud_data[i].xyz.y) || isnan(point_cloud_data[i].xyz.z))
{
continue;
}
ss << (float)point_cloud_data[i].xyz.x << " " << (float)point_cloud_data[i].xyz.y << " "
<< (float)point_cloud_data[i].xyz.z << std::endl;
}
std::ofstream ofs_text(file_name, std::ios::out | std::ios::app);
ofs_text.write(ss.str().c_str(), (std::streamsize)ss.str().length());
}
void Show::ShowDep_Color(){
//这一代 Kinect 支持在一台电脑上打开多台 Kinect。可以用这句代码通过查询主机已连接的Kinet设备数来判断这台主机是否连接了 Kinect
const uint32_t deviceCount = k4a::device::get_installed_count();
if (deviceCount == 0)
{
cout << "未连接任何Kinect设备!" << endl;
}
//配置并启动设备
k4a_device_configuration_t config = K4A_DEVICE_CONFIG_INIT_DISABLE_ALL;
//设置Kinect的相机帧率为30FPS
config.camera_fps = K4A_FRAMES_PER_SECOND_30;
//设置Kinect的深度模式为Near FOV unbinned(这一代 Kinect 支持多种深度模式,官方文档推荐使用 K4A_DEPTH_MODE_NFOV_UNBINNED 和 K4A_DEPTH_MODE_WFOV_2X2BINNED 这两种深度模式)
config.depth_mode = K4A_DEPTH_MODE_NFOV_UNBINNED;
//设置Kinect的颜色属性为BGRA32
config.color_format = K4A_IMAGE_FORMAT_COLOR_BGRA32;
//设置color图的分辨率位 720p
config.color_resolution = K4A_COLOR_RESOLUTION_720P;
//为了同时获取depth和color图,保持这两种图像是同步的
config.synchronized_images_only = true;
cout << "Started opening K4A device..." << endl;
k4a::device device = k4a::device::open(K4A_DEVICE_DEFAULT);
device.start_cameras(&config);
cout << "Finished opening K4A device." << endl;
std::vector<Pixel> depthTextureBuffer;
std::vector<Pixel> irTextureBuffer;
uint8_t *colorTextureBuffer;
//写入txt文件流
ofstream rgb_out;
ofstream d_out;
ofstream ir_out;
rgb_out.open("./rgb.txt");
d_out.open("./depth.txt");
ir_out.open("./ir.txt");
rgb_out << "# color images" << endl;
rgb_out << "# file: rgbd_dataset" << endl;
rgb_out << "# timestamp" << " " << "filename" << endl;
d_out << "# depth images" << endl;
d_out << "# file: rgbd_dataset" << endl;
d_out << "# timestamp" << " " << "filename" << endl;
ir_out << "# ir images" << endl;
ir_out << "# file: rgbd_dataset" << endl;
ir_out << "# timestamp" << " " << "filename" << endl;
rgb_out << flush;
d_out << flush;
//从设备获取捕获图像
k4a::image depthImage;
k4a::image rgbImage;
k4a::image irImage;
k4a::image transformed_depthImage;
cv::Mat cv_rgbImage_with_alpha;
cv::Mat cv_rgbImage_no_alpha;
cv::Mat cv_rgbImage_8U;
cv::Mat cv_depth;
cv::Mat cv_depth_8U;
cv::Mat cv_irImage;
cv::Mat cv_irImage_8U;
//声明一个Kinect的capture
k4a::capture capture;
cv::Mat depthFrame;
cv::Mat rgbFrame;
cv::Mat irFrame;
int ch;
/*
检索并保存 Azure Kinect 图像数据
*/
k4a_device_t device_Record = NULL;
while (1) {
if (device.get_capture(&capture, std::chrono::milliseconds(0)))
{
//通过对应的函数获得相应格式的图像数据
depthImage = capture.get_depth_image();
rgbImage = capture.get_color_image();
irImage = capture.get_ir_image();
ColorizeDepthImage(depthImage, DepthPixelColorizer::ColorizeBlueToRed, GetDepthModeRange(config.depth_mode), &depthTextureBuffer);
ColorizeDepthImage(irImage, DepthPixelColorizer::ColorizeGreyscale, GetIrLevels(K4A_DEPTH_MODE_PASSIVE_IR), &irTextureBuffer);
colorTextureBuffer = rgbImage.get_buffer();
depthFrame = cv::Mat(depthImage.get_height_pixels(), depthImage.get_width_pixels(), CV_8UC4, depthTextureBuffer.data());
rgbFrame = cv::Mat(rgbImage.get_height_pixels(), rgbImage.get_width_pixels(), CV_8UC4, colorTextureBuffer);
irFrame = cv::Mat(irImage.get_height_pixels(), irImage.get_width_pixels(), CV_8UC4, irTextureBuffer.data());
depthFrame.convertTo(cv_depth_8U, CV_8U, 1);
rgbFrame.convertTo(cv_rgbImage_8U, CV_8U, 1);
irFrame.convertTo(cv_irImage_8U, CV_8U, 1);
//imshow("Kinect depth map", depthFrame);
cv::imshow("Kinect color frame", rgbFrame);
//imshow("Kinect color frame", cv_rgbImage_8U);
//imshow("Kinect ir frame", irFrame);
if (_kbhit()) {//如果有按键按下,则_kbhit()函数返回真
imshow("Kinect color frame", rgbFrame);
ch = _getch();//使用_getch()函数获取按下的键值
cout << "-----采集成功!-----" << endl;
cout << " " << endl;
//按下回车键时开始采集图像
if (ch == 13)
{
//深度图和RGB图配准
//Get the camera calibration for the entire K4A device, which is used for all transformation functions.
k4a::calibration k4aCalibration = device.get_calibration(config.depth_mode, config.color_resolution);
k4a::transformation k4aTransformation = k4a::transformation(k4aCalibration);
transformed_depthImage = k4aTransformation.depth_image_to_color_camera(depthImage);
cv_rgbImage_with_alpha = cv::Mat(rgbImage.get_height_pixels(), rgbImage.get_width_pixels(), CV_8UC4,
(void *)rgbImage.get_buffer());
cv::cvtColor(cv_rgbImage_with_alpha, cv_rgbImage_no_alpha, cv::COLOR_BGRA2BGR);
cv_depth = cv::Mat(transformed_depthImage.get_height_pixels(), transformed_depthImage.get_width_pixels(), CV_16U,
(void *)transformed_depthImage.get_buffer(), static_cast<size_t>(transformed_depthImage.get_stride_bytes()));
normalize(cv_depth, cv_depth_8U, 0, 256 * 256, NORM_MINMAX);
cv_depth_8U.convertTo(cv_depth, CV_8U, 1);
cv_irImage = cv::Mat(irImage.get_height_pixels(), irImage.get_width_pixels(), CV_16U,
(void *)irImage.get_buffer(), static_cast<size_t>(irImage.get_stride_bytes()));
normalize(cv_irImage, cv_irImage_8U, 0, 256 * 256, NORM_MINMAX);
cv_irImage.convertTo(cv_irImage_8U, CV_8U, 1);
//imshow("Kinect color frame", rgbFrame);
//save image
double time_rgb = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
rgbImage.get_device_timestamp()).count());
std::string filename_rgb = std::to_string(time_rgb / 1000000) + ".png";
double time_d = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
depthImage.get_device_timestamp()).count());
std::string filename_d = std::to_string(time_d / 1000000) + ".png";
double time_ir = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
irImage.get_device_timestamp()).count());
std::string filename_ir = std::to_string(time_ir / 1000000) + ".png";
imwrite("./RGB/" + filename_rgb, cv_rgbImage_8U);
imwrite("./Depth/" + filename_d, cv_depth_8U);
imwrite("./Ir/" + filename_ir, cv_irImage_8U);
k4a_image_t xy_table = NULL;
k4a_image_t point_cloud = NULL;
int point_count = 0;
double time_point = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
rgbImage.get_device_timestamp()).count());
std::string filename_point = "ply/" + std::to_string(time_point / 1000000) + ".ply";
k4a_image_create(K4A_IMAGE_FORMAT_CUSTOM,
k4aCalibration.depth_camera_calibration.resolution_width,
k4aCalibration.depth_camera_calibration.resolution_height,
k4aCalibration.depth_camera_calibration.resolution_width * (int)sizeof(k4a_float2_t),
&xy_table);
create_xy_table(&k4aCalibration, xy_table);
k4a_image_create(K4A_IMAGE_FORMAT_CUSTOM,
k4aCalibration.depth_camera_calibration.resolution_width,
k4aCalibration.depth_camera_calibration.resolution_height,
k4aCalibration.depth_camera_calibration.resolution_width * (int)sizeof(k4a_float3_t),
&point_cloud);
if (depthImage == 0)
{
printf("Failed to get depth image from capture\n");
}
generate_point_cloud(depthImage, xy_table, point_cloud, &point_count);
write_point_cloud(filename_point.c_str(), point_cloud, point_count);
k4a_image_release(xy_table);
k4a_image_release(point_cloud);
std::cout << "Acquiring!" << endl;
//写入depth.txt, rgb.txt文件
rgb_out << std::to_string(time_rgb / 1000000) << " " << "rgb/" << filename_rgb << endl;
d_out << std::to_string(time_d / 1000000) << " " << "depth/" << filename_d << endl;
ir_out << std::to_string(time_ir / 1000000) << " " << "ir/" << filename_ir << endl;
imshow("Kinect color frame", rgbFrame);
}
}
}
if (waitKey(30) == 27 || waitKey(30) == 'q')
{
device.close();
std::cout << "----------------------------------" << std::endl;
std::cout << "------------- closed -------------" << std::endl;
std::cout << "----------------------------------" << std::endl;
break;
}
}
}