51单片机学习笔记-15 红外遥控
15 红外遥控
[toc]
注:笔记主要参考B站江科大自化协教学视频“51单片机入门教程-2020版 程序全程纯手打 从零开始入门”。
注:工程及代码文件放在了本人的Github仓库。
15.1 红外遥控与外部中断
15.1.1 红外遥控器
红外遥控是利用红外光进行通信的设备,由 红外LED 将调制后的信号发出,由专用的红外接收头进行解调输出。
- 通信方式:单工,异步
- 红外LED波长:940nm(还有一种850nm的可以微微看见红光)
- 通信协议标准:NEC标准


对于红外发射电路来说,要发送的信号应该调制在一定的载频上,才能使得红外接收模块从自然界中识别出遥控器所发出的信号。要实现这个目的,本质上可以采用方式一进行硬件调制,此时输出的红外LED在IN输出高电平时不导通,而在IN输出低电平时,以38kHz的频率闪烁,从而有区别于自然光。软件调制则是提前将IN调制好再进行发送。
而红外接收时,则要完成一系列负载的解调、滤波工作,这些器件集成在红外接收头中,无需关心。最后输出的信号OUT与原来发送的信号IN一致。如下图所示:

注意若没有接收到信号,接收端默认输出高电平;接收到信号才输出低电平。行业内默认空闲信号高电平。
- 空闲状态:红外LED不亮,接收头输出高电平
- 发送低电平:红外LED以38KHz频率闪烁发光,接收头输出低电平
- 发送高电平:红外LED不亮,接收头输出高电平
15.1.2 NEC编码协议
上面介绍了最底层的物理层,已经集成好所以不需要过多关心。对于要发送的数据来说,红外遥控器主要采用NEC编码。

可以看到上述一个完整的数据帧包括4个字节的数据(反码主要用于数据验证),并且由以下三个部分组成:
- Start起始位:红色部分。
- DATA数据部分:蓝色部分。低位在前,高位在后。 注意发送0/1的区别主要在于高电平持续时间,并且在这一部分已经发送完成所有的32位信息。最后一个下降沿发送完成后,持续560us拉高结束。
- Repeat重复标志:绿色部分。如果按下按键不松手,就会重复发送该标志。最后的下降沿完成后,也是持续560us的低电平,然后拉高结束。
上述32位数据中,后发送的16位“命令”,指的就是遥控器的键码值,如下图:

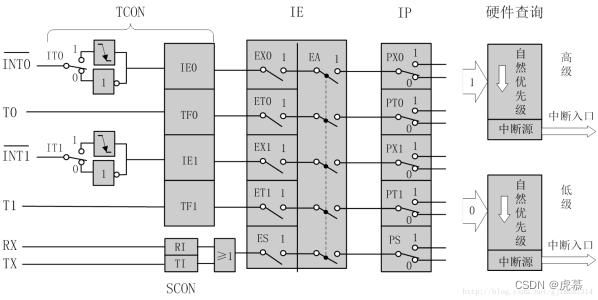
15.1.3 外部中断
由于红外遥控发送信号的速度很快(几十ms),如果采用单片机内部中断,很可能会遗漏信号,此时就需要 外部中断 实时的采集信号。回顾之前所学,STC89C52有4个外部中断,但是单片机只引出了2个外部中断(P3.2/P3.3)。这些外部中断有两种触发方式:下降沿触发和低电平触发。根据NEC编码协议,显然需要 下降沿触发。
// 中断后,就执行下面这些中断子程序
void Int0_Routine(void) interrupt 0 { 函数体 }
void Timer0_Routine(void) interrupt 1 { 函数体 }
void Int1_Routine(void) interrupt 2 { 函数体 }
void Timer1_Rountine(void) interrupt 3 { 函数体 }
void UART_Routine(void) interrupt 4 { 函数体 }
void Timer2_Routine(void) interrupt 5 { 函数体 }
void Int2_Routine(void) interrupt 6 { 函数体 }
void Int3_Routine(void) interrupt 7 { 函数体 }

15.2 实验:红外遥控基本应用
需求:使用红外遥控发射信号,并将接收到的结果显示在LCD液晶屏上:
- LCD第一行显示“ADDR COMD NUM”。
- LCD第二行依次显示红外遥控的地址码、键码、音量按键(VOL+/VOL-)计数变量num。对于这个num,按下VOL+加1,按下VOL-则减一,要是一直按着不松手,那就快速增加/减小。
下面是初始化外部中断的一个小参考:
整个程序使用了状态机。注意和FPGA中的单片机不太一样的是,所有的判断过程都是在外部中断(下降沿)来临时产生的,所以系统在执行判断语句的时候,目前的波形早就过去了。简单一句话,FPGA所有的信号等着你判断完才运行,所以要注意实时性;单片机中实际信号在你判断的时候已经过去了,有错位。并且状态机是在外部中断0的中断函数中完成的,这个中断函数放在HS0038.c文件中。

代码展示:
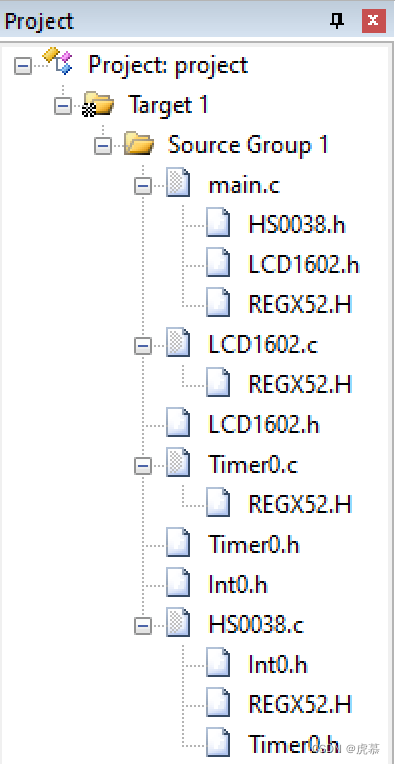
- main.c
#include HS0038.h
#ifndef __HS0038_H__
#define __HS0038_H__
#define HS_POWER 0x45
#define HS_MODE 0x46
#define HS_MUTE 0x47
#define HS_START_STOP 0x44
#define HS_PREVIOUS 0x40
#define HS_NEXT 0x43
#define HS_EQ 0x07
#define HS_VOL_MINUS 0x15
#define HS_VOL_ADD 0x09
#define HS_0 0x16
#define HS_RPT 0x19
#define HS_USD 0x0D
#define HS_1 0x0C
#define HS_2 0x18
#define HS_3 0x5E
#define HS_4 0x08
#define HS_5 0x1C
#define HS_6 0x5A
#define HS_7 0x42
#define HS_8 0x52
#define HS_9 0x4A
void HS0038_Init(void);//红外接收初始化
unsigned char HS0038_GetReadFlag(void);//是否已经接收完红外数据
unsigned char HS0038_GetRepeFlag(void);//是否接收到重复数据
unsigned char HS0038_GetAddress(void);//读取地址码
unsigned char HS0038_GetCommand(void);//读取命名码(键码)
#endif
HS0038.c
#include Int0.h
#ifndef __INT0_H__
#define __INT0_H__
//外部中断0的初始化函数
void Int0_Init(void){
IT0 = 1;//下降沿触发
IE0 = 0;//默认没有触发中断请求
EX0 = 1;//允许外部中断0中断
EA = 1;//全局中断允许
PX0 = 1;//提升外部中断0的优先级
}
/*中断函数模板
//外部中断0中断后所需要执行的函数
void Int0_Routine(void) interrupt 0 {
}
*/
#endif
Timer0.h
#ifndef __TIMER0_H__
#define __TIMER0_H__
//下面的函数实现正常计数中断
void Timer0_Init(void);//定时器0正常初始化
//下面的函数是为了实现计数的功能,不能中断
void Timer0_CountInit(void);//定时器0计数初始化
void Timer0_SetCounter(unsigned int num_count);//设置计数器0当前的值
unsigned int Timer0_GetCounter(void);//读取计数器0当前的值
void Timer0_Run(unsigned char run_flag);//计数器0是否运行(1/0)
#endif
Timer0.c
#include 编程感想:
- 验证外部中断初始化的小技巧:由于外部中断的引脚与按键开关的引脚相同,所以通过检测按下按键的次数,就可以实现对外部中断是否完成初始化进行验证。
- 一般不使用外部中断进行按键检测。因为有可能会收到按键抖动的影响,并且也无法做到上升沿检测。
- 关于检测高电平持续时间:由于只用到了外部中断0的下降沿触发,所以实际上测量的是整个周期的时间长度。当然,定时器计数也存在误差,所以定时器判断可以设定为经典值左右500us。
注:Start-13500us、Data0-1120us、Data1-2250us、Repeat-11250us。
转换到11.0592MHz晶振,对应关系为Start-12442周期、Data0-1032周期、Data1-2074周期、Repeat-10368周期。
- 关于移位:Keil中移位16位以上就不再正确。 所以单次发送的32位数据可以考虑用数组
unsigned char Data[4]来进行存储。- 卡了很久的bug:注意移位默认填进来的是0,左移不能疏忽! 如果接收到0,应该写
rdata[i/8] &= ~(0x01<<(i%8));,而不能写rdata[i/8] &= (0xfe<<(i%8));。- 关于灵敏度。有时候按着按着就不灵敏了,过一段时间又好了。这种现象非常奇怪,后来我觉得应该是这个红外遥控抗干扰能力太弱了。如果用手捂着遥控和接收器,会发现其实还挺灵敏的。
15.3 红外遥控电机调速
需求:在之前“直流电机调速”的基础上,使用数码管显示直流电机当前转速,并使用红外遥控的0、1、2、3、4控制5档转速。直流电机转速等级:Stop、40%、50%、75%、100%。
- 数码管的显示可以为:00、40、50、75、100。
- 注:综合考虑程序效率和硬件效果,由于要设置PWM周期为100个定时器中断,且PWM调速频率应在10kHz量级,于是尽量调低定时器中断周期,最后设置为100us。

代码如下:
- main.c
#include - DC_Motor.h
#ifndef __DC_MOTOR_H__
#define __DC_MOTOR_H__
//电机初始化(主要是对PWM初始化)
void DC_Motor_Init(void);
//调节电机(PWM)占空比
void DC_Motor_SetSpeed(unsigned char speed);
#endif
- DC_Motor.c
#include "Timer1.h"
#include "NixieTube.h"
#define motor P1_0
unsigned int PWM_Peri = 100;
unsigned int PWM_Duty = 0;
//电机初始化(主要是对PWM初始化)
void DC_Motor_Init(void){
//初始化定时器
Timer1_Init();
}
//调节电机(PWM)占空比
void DC_Motor_SetSpeed(unsigned char speed){
unsigned char hunds,tens,ones;
PWM_Duty = speed;
ones = speed%10; speed = speed/10;
tens = speed%10; speed = speed/10;
hunds = speed%10;
if(hunds==0){hunds = 10;}//如果百位是0,那数码管就不显示
//数码管更新显示转速等级
NixieTube_SetBuf(8,hunds);
NixieTube_SetBuf(7,tens);
NixieTube_SetBuf(6,ones);
}
/**********************************************/
// 定义定时器T1中断后要执行的动作
void Timer1_Routine() interrupt 3{
static unsigned int count1_T1,count2_T1; //中断次数
TH1 = 0xFF; TL1 = 0xA4; // 恢复溢出周期,近似100us
//对于PWM所需的中断
count1_T1++; //更新中断次数
if(count1_T1>PWM_Peri){
count1_T1 = 0;
}else{
if(count1_T1<PWM_Duty){motor=1;}//电机运行
else {motor=0;}//电机不运行
}
//数码管扫描所需的中断
count2_T1++; //更新中断次数
if(count2_T1>2){
count2_T1 = 0;
NixieTube_Loop();
}
}
- Timer1.h
#ifndef __TIMER1_H__
#define __TIMER1_H__
#include - NixieTube.h
#ifndef __NIXIETUBE_H__
#define __NIXIETUBE_H__
//改变数码管数据缓冲区的数值
void NixieTube_SetBuf(unsigned char index,unsigned char num);
//在指定数码管显示指定的数字
void NixieTube_Signle(unsigned char led, unsigned char num);
//定时器中断函数执行的数码管扫描函数
void NixieTube_Loop(void);
#endif
- NixieTube.c
#include HS0038.h、HS0038.c、Int0.h、Timer0.h、Timer0.c 均与上一个实验相同。
编程感想:
- 卡了很久的bug:红外初始化时,使用了原来的定时器T0初始化函数(允许T0中断),而不是最新的初始化函数(只允许T0计数而不能中断)。导致按下红外之后,整个系统没什么现象。
- 关于电力资源。在找上述bug的过程中,使用LCD显示屏查看中间变量,最后调试完成。然后拆下LCD1602硬件(此时还保留着代码中使用LCD显示变量的语句)运行程序,会发现每次按下按键的时候,数码管会整体闪烁出“噪点”;当把代码中关于LCD1602的一切删除干净后,所有系统都可以正常工作,数码管也不会出现噪点。结论就是:LCD显示的过程会占用很多引脚资源/功率资源,导致数码管/红外接收等其他元器件工作不灵敏。