ViT-vision transformer
ViT-vision transformer
介绍
Transformer最早是在NLP领域提出的,受此启发,Google将其用于图像,并对分类流程作尽量少的修改。
起源:从机器翻译的角度来看,一个句子想要翻译好,必须考虑上下文的信息!
如:The animal didn’t cross the street because it was too tired将其翻译成中文,这里面就涉及了it这个词的翻译,具体it是指代animal还是street就需要根据上下文来确定,所以现在问题就变成,如何让机器学习上下文?
例如有两个特征,分别为性别和收入,二者做交互特征(简单的说即两个特征相乘),可以得到如:此数据为男人的状态下收入为多少的特征,则可以利用这个特征去分析性别对收入的影响,相对于同时考虑了性别和收入的关系。那么借鉴这个思想,相对于引入一个相乘的交互关系就可以去表示上下文信息了。而Attention在本质上用一句话概括就是:带权重的相乘求和。
在Attention中,假如我们要翻译it这个词,这时候it这个词称为query(Q)待查询。查询什么呢,查询句子中的其他单词包括自己(这里其他的单词包括自己称为(keys(K)),这里的查询操作相对于上文说的相乘,而在Attention中用的是点乘操作。如果还记得Attention的输入是Patch embedding的结果,即是一个个N维空间的向量,即Q和K代表的内容都为N维空间的向量,那么点乘即可以表示这两个向量的相似程度——Q*K = |Q||K|cosθ
Q和K相乘后可以得到一个代表词和词之间相似度的概念,这里记为S。如果我们对这个S取softmax,是不是相对于就得到了当前要查询的Q,到底对应哪个词的概率比较大的概率,这里记为P。
而Attention就是对P做权重加和的结果,而为什么还要对P做权重(这个权重也是可学习的)加和呢,其实我觉得这才是Attention的精髓,因为每个权重即代表了网络对于哪个概率对应下的内容更加注意,对于哪些内容不需要注意,使网络可以更加关注与需要注意的东西,其他无关的东西,通过这个权重,相对于舍弃了。而我们记这个权重为V。
思路:ViT算法中,首先将整幅图像拆分成若干个patch,然后把这些patch的线性嵌入序列作为Transformer的输入送入网络,然后使用监督学习的方式进行图像分类的训练。
具体流程:
- 将图像拆分成若干个patch
- 将patches通过一个线性映射层,得到若干个token embedding
- 将多个token embedding concat一个cls_token(可学习参数)
- 每个参数均加上position embedding位置编码,防止无法找到原来的位置
- 将token embedding、cls_token和position embedding一同传入encoder模块
- encoder模块(L个block)
- Layer Norm:标准归一化(便于收敛)
- MSA/MHA:多头子注意力机制
- 输入输出作残差链接
- Layer Norm:标准归一化(便于收敛)
- MLP:全连接层(Linear+…)
- encoder的输出通过MLP Head作分类任务
优点:模型简单且效果好,较好的扩展性,模型越大效果越好。
与CNN结构对比
- Transformer的平移不变性和局部感知性较差,在数据量不充分时,效果较差
- 但是对于大量的训练数据,Transformer的效果更佳
- 无需像CNN构造复杂的网络结构,CNN往往是不断加深网络,才能对刷新某任务的SOTA
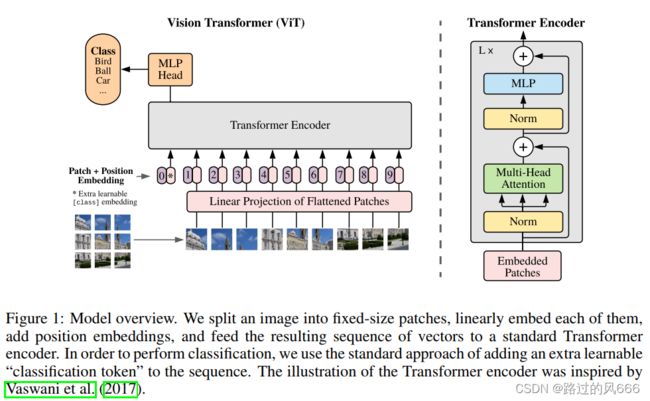
模型结构
图像分块嵌入Patch Embedding
具体步骤:
-
将 H ∗ W ∗ C H * W * C H∗W∗C的图像,变成一个 N ∗ ( P 2 ∗ C ) N * (P^2*C) N∗(P2∗C)的序列,这个序列由一系列展平的图像块构成,即把图像切分成小块后再展平,其中, N = H W / P 2 N=HW/P^2 N=HW/P2个图像块,每个图像块的维度为 P 2 ∗ C P^2*C P2∗C, P P P表示图像块大小, C C C表示通道数量。
-
将每个图像块的维度由 P 2 ∗ C P^2*C P2∗C变换为 D D D,在此进行embedding,只需对每个 P 2 ∗ C P^2*C P2∗C图像块做一个线性变换,将维度压缩至 D D D。
-
将 ( N + 1 ) ∗ D (N+1)*D (N+1)∗D的序列作为encoder的输入。
为啥是N+1呢?因为要多加上一个维度才能关联到全局的信息,这个恰好是class token
class PatchEmbed(nn.Module):
"""
2D Image to Patch Embedding
"""
def __init__(self, img_size=224, patch_size=16, in_c=3, embed_dim=768, norm_layer=None):
super().__init__()
img_size = (img_size, img_size)
patch_size = (patch_size, patch_size)
self.img_size = img_size
self.patch_size = patch_size
self.grid_size = (img_size[0] // patch_size[0], img_size[1] // patch_size[1])
self.num_patches = self.grid_size[0] * self.grid_size[1]
self.proj = nn.Conv2d(in_c, embed_dim, kernel_size=patch_size, stride=patch_size)
self.norm = norm_layer(embed_dim) if norm_layer else nn.Identity()
def forward(self, x):
B, C, H, W = x.shape
assert H == self.img_size[0] and W == self.img_size[1], \
f"Input image size ({H}*{W}) doesn't match model ({self.img_size[0]}*{self.img_size[1]})."
# flatten: [B, C, H, W] -> [B, C, HW]
# transpose: [B, C, HW] -> [B, HW, C]
x = self.proj(x).flatten(2).transpose(1, 2)
x = self.norm(x)
return x
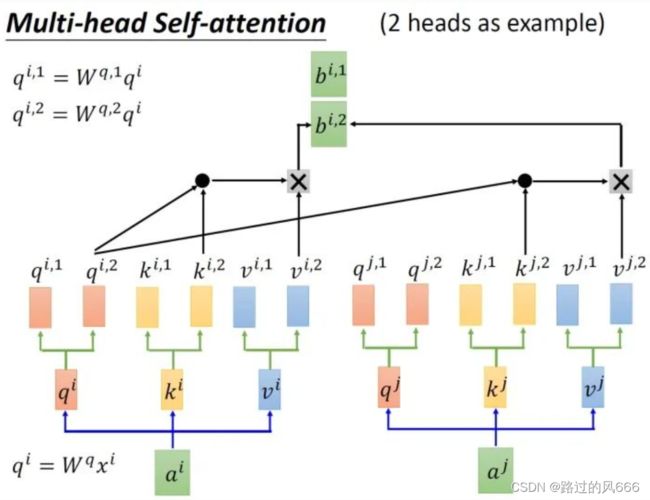
多头自注意力机制Multi-head Self-attention
多头较于单头的优势是增强了网络的稳定性和鲁棒性
将 ( N + 1 ) ∗ D (N+1)*D (N+1)∗D的序列输入至encoder进行特征提取,其最重要的结构是多头自注意力机制,2 head的multi-head attention结构如下所示,具体步骤如下:
- 输入 a i a^i ai经过转移矩阵 W W W,得到 q i , k i , v i q^i,k^i,v^i qi,ki,vi,再分别切分成 q i , 1 , q i , 2 , k i , 1 , k i , 2 , v i , 1 , v i , 2 , q i , 1 . . . q^{i,1},q^{i,2},k^{i,1},k^{i,2},v^{i,1},v^{i,2},q^{i,1}... qi,1,qi,2,ki,1,ki,2,vi,1,vi,2,qi,1...
- 接着 q i , j 与 k i , j q^{i,j}与k^{i,j} qi,j与ki,j做attention,得到权重向量 α α α,将 α α α与 v i , j v^{i,j} vi,j进行加权求和,最终得到 b i , j b^{i,j} bi,j
- 将 b i , j b^{i,j} bi,j拼接起来,通过一个线性层进行处理,得到最终的结果。
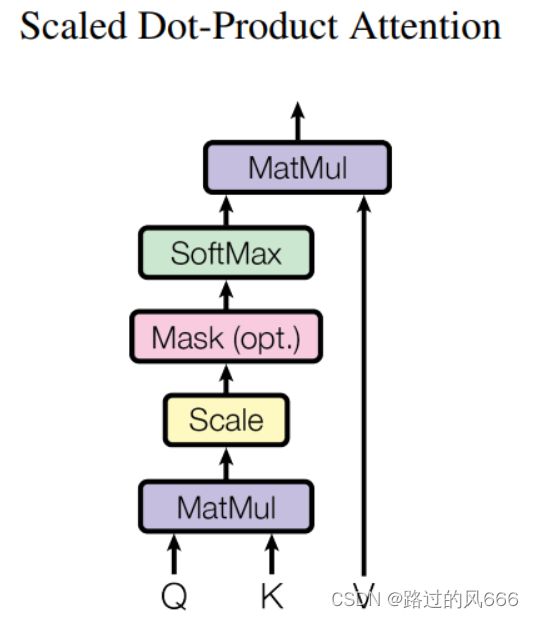
具体说说其中的attention, q i , j , k i , j 与 v i , j q^{i,j},k^{i,j}与v^{i,j} qi,j,ki,j与vi,j计算 b i , j b^{i,j} bi,j的方法是缩放点积注意力 (Scaled Dot-Product Attention),加权内积得到 α α α:
α 1 , i = q 1 ∗ k i d α_{1,i}=\frac{q^1*k^i}{\sqrt{d}} α1,i=dq1∗ki
其中,d是q和k的维度大小,除以一个 d \sqrt{d} d可以达到归一化的效果。
接着,将 α 1 , i α_{1,i} α1,i取softmax操作,并与 v i , j v^{i,j} vi,j相乘得到最后结果。
class Attention(nn.Module):
def __init__(self,
dim, # 输入token的dim
num_heads=8,
qkv_bias=False,
qk_scale=None,
attn_drop_ratio=0.,
proj_drop_ratio=0.):
super(Attention, self).__init__()
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop_ratio)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop_ratio)
def forward(self, x):
# [batch_size, num_patches + 1, total_embed_dim]
B, N, C = x.shape
# qkv(): -> [batch_size, num_patches + 1, 3 * total_embed_dim]
# reshape: -> [batch_size, num_patches + 1, 3, num_heads, embed_dim_per_head]
# permute: -> [3, batch_size, num_heads, num_patches + 1, embed_dim_per_head]
qkv = self.qkv(x).reshape(B, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
# [batch_size, num_heads, num_patches + 1, embed_dim_per_head]
q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
# transpose: -> [batch_size, num_heads, embed_dim_per_head, num_patches + 1]
# @: multiply -> [batch_size, num_heads, num_patches + 1, num_patches + 1]
attn = (q @ k.transpose(-2, -1)) * self.scale
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
# @: multiply -> [batch_size, num_heads, num_patches + 1, embed_dim_per_head]
# transpose: -> [batch_size, num_patches + 1, num_heads, embed_dim_per_head]
# reshape: -> [batch_size, num_patches + 1, total_embed_dim]
x = (attn @ v).transpose(1, 2).reshape(B, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x
多层感知机Multilayer Perceptron
class Mlp(nn.Module):
"""
MLP as used in Vision Transformer, MLP-Mixer and related networks
"""
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
DropPath
一种特殊的 Dropout,用来替代传统的Dropout结构。作用是:若x为输入的张量,其通道为[B,C,H,W],那么drop_path的含义为在一个Batch_size中,随机有drop_prob的样本,不经过主干,而直接由分支进行恒等映射。
def drop_path(x, drop_prob: float = 0., training: bool = False):
if drop_prob == 0. or not training:
return x
keep_prob = 1 - drop_prob
shape = (x.shape[0],) + (1,) * (x.ndim - 1) # work with diff dim tensors, not just 2D ConvNets
random_tensor = keep_prob + torch.rand(shape, dtype=x.dtype, device=x.device)
random_tensor.floor_() # binarize
output = x.div(keep_prob) * random_tensor
return output
class DropPath(nn.Module):
"""
Drop paths (Stochastic Depth) per sample (when applied in main path of residual blocks).
"""
def __init__(self, drop_prob=None):
super(DropPath, self).__init__()
self.drop_prob = drop_prob
def forward(self, x):
return drop_path(x, self.drop_prob, self.training)
Class Token
假设我们将原始图像切分成 3 × 3 = 9个小图像块,最终的输入序列长度却是10,也就是说我们这里人为的增加了一个向量进行输入,我们通常将人为增加的这个向量称为 Class Token。
若没有这个向量,也就是将 N = 9 个向量输入 Transformer 结构中进行编码,我们最终会得到9个编码向量,可对于图像分类任务而言,我们应该选择哪个输出向量进行后续分类呢?两个方案可以实现:
- ViT算法提出了一个可学习的嵌入向量 Class Token,将它与9个向量一起输入到 Transformer 结构中,输出10个编码向量,然后用这个 Class Token 进行分类预测即可。
- 取除了cls_token之外的所有token的均值作为类别特征表示,即编码中的x[:,self.num_tokens:].mean(dim=1)
Positional Encoding
在self-attention中,输入是一整排的tokens,我们很容易知道tokens的位置信息,但是模型是无法分辨的,因为self-attention的运算是无向的,因此才使用positional encoding把位置信息告诉模型。
按照 Transformer 结构中的位置编码习惯,这个工作也使用了位置编码。不同的是,ViT 中的位置编码没有采用原版 Transformer 中的 sin/cos 编码,而是直接设置为可学习的 Positional Encoding。
MLP Head
得到输出后,ViT中使用了 MLP Head对输出进行分类处理,这里的 MLP Head 由 LayerNorm 和两层全连接层组成,并且采用了 GELU 激活函数。
参考链接:
- https://blog.csdn.net/qq_42735631/article/details/126709656?ops_request_misc=&request_id=&biz_id=102&utm_term=vision%20transformer%E6%A8%A1%E5%9E%8B&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduweb~default-0-126709656.nonecase&spm=1018.2226.3001.4187
- https://blog.csdn.net/aixiaomi123/article/details/128025584?ops_request_misc=&request_id=&biz_id=102&utm_term=vision%20transformer%E6%A8%A1%E5%9E%8B&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduweb~default-1-128025584.nonecase&spm=1018.2226.3001.4187
- https://github.com/google-research/vision_transformer/tree/main
- https://blog.csdn.net/lzzzzzzm/article/details/122963640?ops_request_misc=&request_id=&biz_id=102&utm_term=vit%20transformer%E4%B8%AD%E7%9A%84%E5%A4%9A%E5%A4%B4%E8%87%AA%E6%B3%A8%E6%84%8F%E5%8A%9B%E6%9C%BA%E5%88%B6&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduweb~default-1-122963640.nonecase&spm=1018.2226.3001.4187
02&utm_term=vit%20transformer%E4%B8%AD%E7%9A%84%E5%A4%9A%E5%A4%B4%E8%87%AA%E6%B3%A8%E6%84%8F%E5%8A%9B%E6%9C%BA%E5%88%B6&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduweb~default-1-122963640.nonecase&spm=1018.2226.3001.4187- https://blog.csdn.net/weixin_41803874/article/details/125729668