opencv基础功能实现
文章目录
- chapter1 Read Images Videos and Webcams
- chapter2 Basic Functions
- chapter3 Resize and Crop
- chapter4 Draw Shapes and Text
- chapter5 Warp Images
- chapter6 Color Detection
- chapter7 Shapes/Contour Detection
- chapter8 Face Detection
- project1 Virtual Painter
- project2 Document Scanner
- project3 License Plate Detector
chapter1 Read Images Videos and Webcams
#include chapter2 Basic Functions
#include chapter3 Resize and Crop
#include 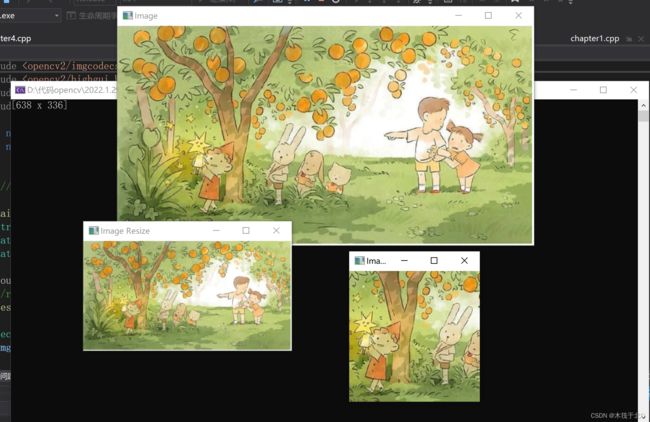
chapter4 Draw Shapes and Text
#include 
chapter5 Warp Images
#include chapter6 Color Detection
#include chapter7 Shapes/Contour Detection
#include 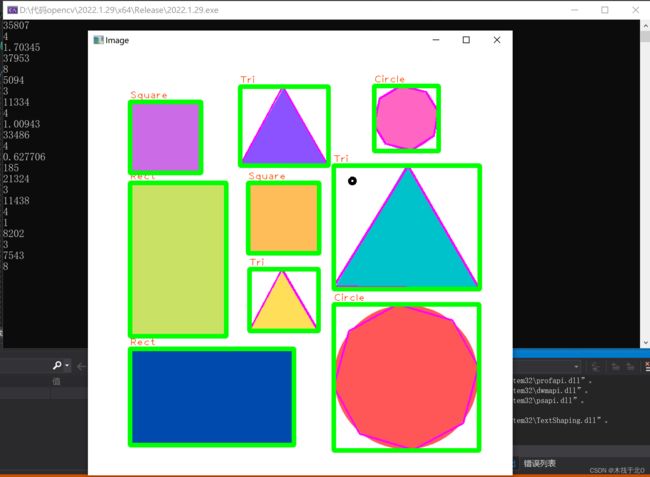
chapter8 Face Detection
#include 
project1 Virtual Painter
colorPicker.cpp
#include project1.cpp
#include project2 Document Scanner
#include 
project3 License Plate Detector
#include