【雕爷学编程】Arduino动手做(183)---太搞笑啦,一支胶管制成二只蠕动机器人
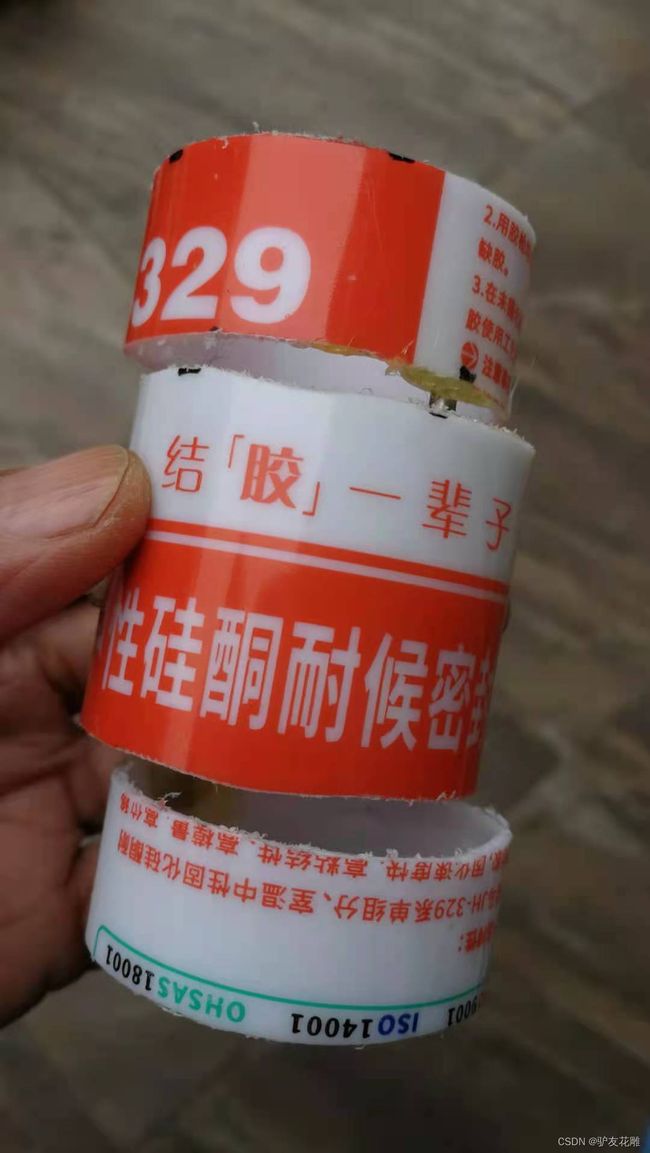
装修屋子,用完了一筒千里马密封胶,偶然脑洞大开,想要试试看…

于是就把空的胶管锯成六段,长的是身子,短的做轮子,我给它起的名字是叫空心轮

开始制作简易的蠕动机器人,尝试不同的运动方式,空心的轮子

接触电机驱动模块以来,一直对MX1508模块印象不错,一元前后性价比高,体积小,不用散热,性能稳定,控制也简单,买了十来片

使用MX1508控制2只N20电机绰绰有余
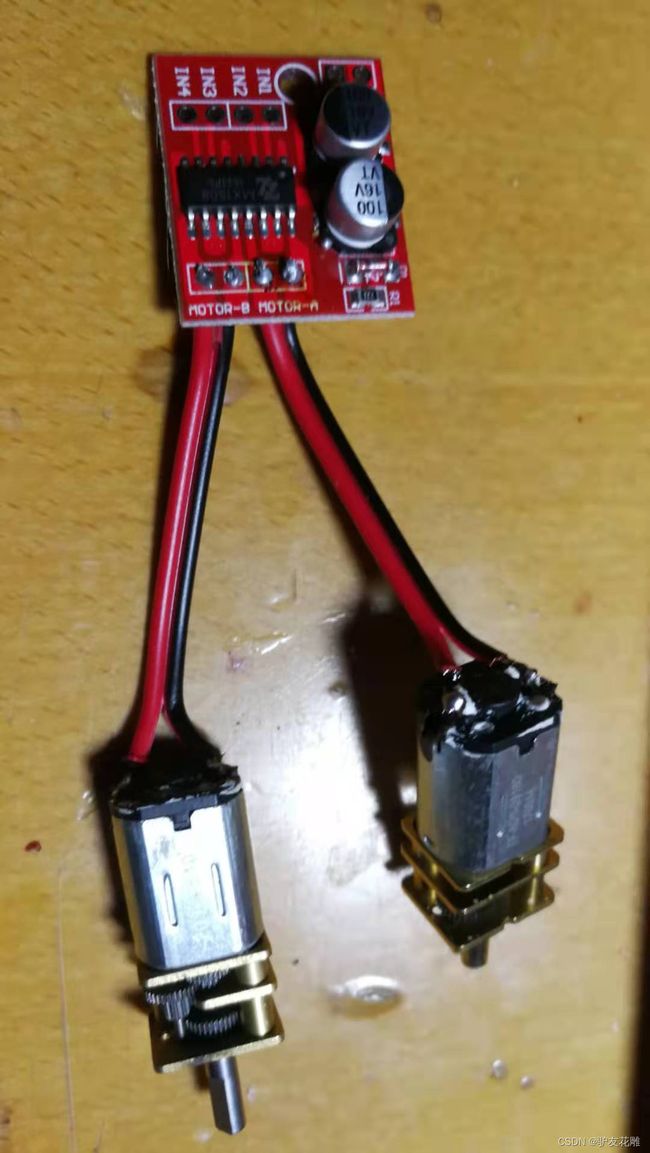
第一只简易蠕动机器人,样子有点丑
二只小电机安装在管壁亮端,不在一个平面上,步态蠕动(视频)
https://v.youku.com/v_show/id_XNTA0NzUyNzc5Mg==.html?spm=a2hzp.8244740.0.0

实验开源代码
/*
【花雕动手做】太搞笑啦,用一支密封胶管制成二只空心轮蠕动机器人
实验程序:前后与左转、右转各二秒钟
*/
void setup() {
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
pinMode(11, OUTPUT);
pinMode(12, OUTPUT);
}
void loop() {
digitalWrite(9, HIGH); //向前二秒
digitalWrite(10, LOW);
digitalWrite(11, HIGH);
digitalWrite(12, LOW);
delay(2000);
digitalWrite(9, LOW); //停止一秒
digitalWrite(10, LOW);
digitalWrite(11, LOW);
digitalWrite(12, LOW);
delay(1000);
digitalWrite(9, LOW); //向后二秒
digitalWrite(10, HIGH);
digitalWrite(11, LOW);
digitalWrite(12, HIGH);
delay(2000);
digitalWrite(9, LOW); //停止一秒
digitalWrite(10, LOW);
digitalWrite(11, LOW);
digitalWrite(12, LOW);
delay(1000);
digitalWrite(9, HIGH); //左转二秒
digitalWrite(10, LOW);
digitalWrite(11, LOW);
digitalWrite(12, HIGH);
delay(2000);
digitalWrite(9, LOW); //停止一秒
digitalWrite(10, LOW);
digitalWrite(11, LOW);
digitalWrite(12, LOW);
delay(1000);
digitalWrite(9, LOW); //右转二秒
digitalWrite(10, HIGH);
digitalWrite(11, HIGH);
digitalWrite(12, LOW);
delay(2000);
digitalWrite(9, LOW); //停止一秒
digitalWrite(10, LOW);
digitalWrite(11, LOW);
digitalWrite(12, LOW);
delay(1000);
}
密封胶管的内部空间狭小,采用了小体积的锂电池,并使用了5V升压模块,这个是电机驱动的电源组合

非常迷你的3.7V—5V升压模块



用一支密封胶管制成的二只空心轮蠕动机器人,样子肯定不像小车子,有点另类,粗糙又难看。好在它们都能动,可以蠕动前行,二只总成本也不高,二十元出头。

非对称轮轴的空心轮蠕动机器人,N20安装在胶管两端

不多见的蠕动方式运动(视频)
https://v.youku.com/v_show/id_XNTA1OTQxODAxNg==.html?spm=a2hzp.8244740.0.0
添加链接描述
空心轮蠕动机器人项目开源图形编程(Mind+、编玩边学)
注:为方便截图,放在边上,应该接起来
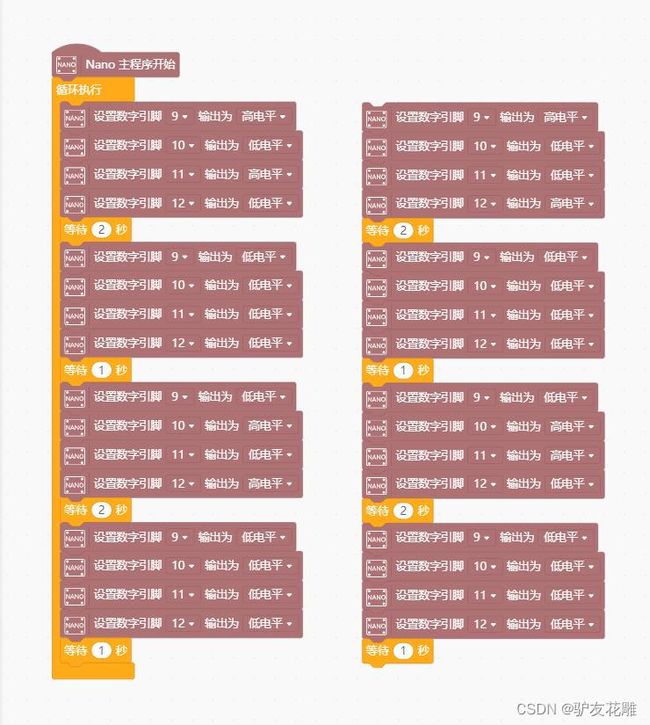
【花雕动手做】太搞笑啦,用一支密封胶管制成二只空心轮蠕动机器人
上为非对称轴,下为对称轴


第二个,对称轮轴的空心轮蠕动机器人(视频)
https://v.youku.com/v_show/id_XNTA1OTMzMjA0MA==.html?spm=a2hzp.8244740.0.0
【花雕动手做】太搞笑啦,用一支密封胶管制成二只空心轮蠕动机器人(视频)
https://v.youku.com/v_show/id_XNTA1OTMzMzM3Ng==.html?spm=a2hzp.8244740.0.0
二只空心轮蠕动机器人