FPGA----IP核float(定点数转浮点数)使用
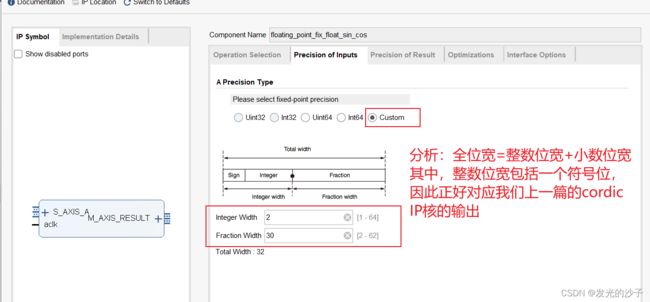
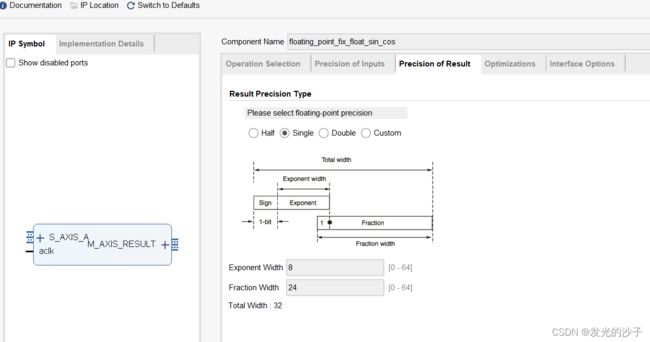
1、本文紧接上一篇文章,因为我们计算设定的32位的单精度浮点数,但是cordic IP核输出的是32位定点数x(符号位)_x(整数位)_xx,xxxx,xxxx,xxxx,xxxx,xxxx,xxxx,xxxx(小数位),为了方便使用float IP核的计算,因此我们需要将定点数转为浮点数。本片文章为全网第一篇带小数的定点数转浮点数的例程。
2、Floating-point IP核使用
实验任务:实现sin(±120°)32位定点数转浮点数操作,具体值怎么算的请参考上一篇文章
实验软硬件:ZCU106、Vivado 2019.1
实验过程:
①建立test_fix_to_float项目,并添加top、testbench文件,添加Floating-point IP核(这一步如果还不会,真别往下看了,好好复习以下前面的东西)
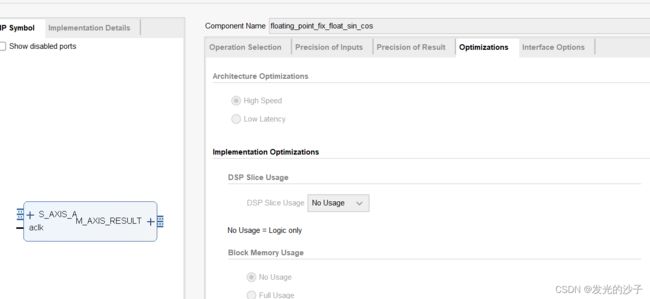
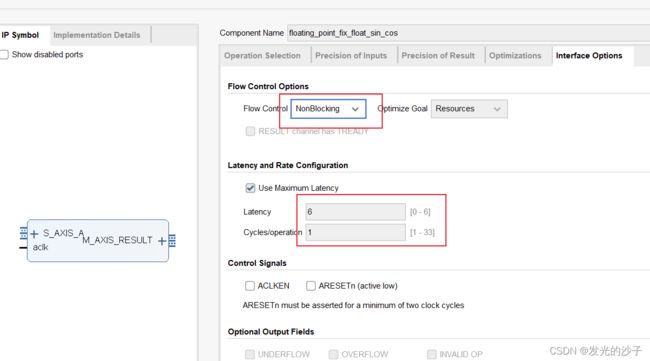
②Floating-point IP核做如下设置

③复制以下代码到对应文件中,并点击
`timescale 1ns / 1ps
//
// Company: 东北电力大学
// Engineer: Yang Zheng
//
// Create Date: 2021/12/31 22:57:23
// Design Name:
// Module Name: top
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//
module top(
input clk,
input [31:0] s_axis_a_tdata_sin_cos_a,
input s_axis_a_tvalid_sin_cos_a,
output [31:0] m_axis_result_tdata_sin_cos_a,
input [31:0] s_axis_a_tdata_sin_cos_b,
input s_axis_a_tvalid_sin_cos_b,
output [31:0] m_axis_result_tdata_sin_cos_b,
input [31:0] s_axis_a_tdata_sin_cos_c,
input s_axis_a_tvalid_sin_cos_c,
output [31:0] m_axis_result_tdata_sin_cos_c,
output m_axis_result_tvalid_sin_cos_a,
output m_axis_result_tvalid_sin_cos_b,
output m_axis_result_tvalid_sin_cos_c
);
floating_point_fix_float_sin_cos uut_floating_point_fix_float_sin_cos_a(
.aclk(clk),
.s_axis_a_tvalid(s_axis_a_tvalid_sin_cos_a),
.s_axis_a_tdata(s_axis_a_tdata_sin_cos_a),
.m_axis_result_tvalid(m_axis_result_tvalid_sin_cos_a),
.m_axis_result_tdata(m_axis_result_tdata_sin_cos_a)
);
floating_point_fix_float_sin_cos uut_floating_point_fix_float_sin_cos_b(
.aclk(clk),
.s_axis_a_tvalid(s_axis_a_tvalid_sin_cos_b),
.s_axis_a_tdata(s_axis_a_tdata_sin_cos_b),
.m_axis_result_tvalid(m_axis_result_tvalid_sin_cos_b),
.m_axis_result_tdata(m_axis_result_tdata_sin_cos_b)
);
floating_point_fix_float_sin_cos uut_floating_point_fix_float_sin_cos_c(
.aclk(clk),
.s_axis_a_tvalid(s_axis_a_tvalid_sin_cos_c),
.s_axis_a_tdata(s_axis_a_tdata_sin_cos_c),
.m_axis_result_tvalid(m_axis_result_tvalid_sin_cos_c),
.m_axis_result_tdata(m_axis_result_tdata_sin_cos_c)
);
endmodule
`timescale 1ns / 1ps
//
// Company: 东北电力大学
// Engineer: Yang Zheng
//
// Create Date: 2021/12/31 23:00:20
// Design Name:
// Module Name: testbench
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//
module testbench(
);
reg clk;
reg a_valid_a = 1'b0;
reg [31:0] a_a = 32'b0;
wire [31:0] result_a;
reg a_valid_b = 1'b0;
reg [31:0] a_b = 32'b0;
wire [31:0] result_b;
reg a_valid_c = 1'b0;
reg [31:0] a_c = 32'b0;
wire [31:0] result_c;
top uut_top(
.clk(clk),
.s_axis_a_tdata_sin_cos_a(a_a),
.s_axis_a_tvalid_sin_cos_a(a_valid_a),
.m_axis_result_tdata_sin_cos_a(result_a),
.s_axis_a_tdata_sin_cos_b(a_b),
.s_axis_a_tvalid_sin_cos_b(a_valid_b),
.m_axis_result_tdata_sin_cos_b(result_b),
.s_axis_a_tdata_sin_cos_c(a_c),
.s_axis_a_tvalid_sin_cos_c(a_valid_c),
.m_axis_result_tdata_sin_cos_c(result_c),
.m_axis_result_tvalid_sin_cos_a(m_axis_result_tvalid_sin_cos_a),
.m_axis_result_tvalid_sin_cos_b(m_axis_result_tvalid_sin_cos_b),
.m_axis_result_tvalid_sin_cos_c(m_axis_result_tvalid_sin_cos_c)
);
always #5 clk=~clk;
initial begin
clk = 1'b0;
#100;
a_valid_a <= 1'b1;
a_a <= 32'h376CF5D0;
a_valid_b <= 1'b1;
a_b <= 32'h376CF5D0;
a_valid_c <= 1'b1;
a_c <= 32'h376CF5D0;
#500;
a_valid_a <= 1'b1;
a_a <= 32'hc8930a30;
a_valid_b <= 1'b1;
a_b <= 32'hc8930a30;
a_valid_c <= 1'b1;
a_c <= 32'hc8930a30;
end
always @(posedge clk) begin
if (m_axis_result_tvalid_sin_cos_a == 1'b1
&& m_axis_result_tvalid_sin_cos_b == 1'b1
&& m_axis_result_tvalid_sin_cos_c == 1'b1) begin
a_valid_a <= 1'b0;
a_valid_b <= 1'b0;
a_valid_c <= 1'b0;
end
end
endmodule
④结果分析
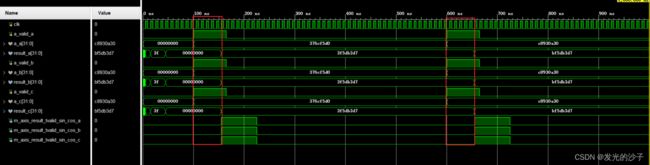
可以看到,结果在6个周期后输出
注意:例化模块时,输出端口我们一般设置位wire类型变量,千万不要对其赋值,因为这样会造成输出结果的xxxx(不定状态)
