ROS学习记录:话题发布和订阅的实现(C++/python)
发布方(C++):
#include "ros/ros.h"
#include "std_msgs/String.h"
#include
/*
需求: 实现基本的话题通信,一方发布数据,一方接收数据,
实现的关键点:
1.发送方
2.接收方
3.数据(此处为普通文本)
PS: 二者需要设置相同的话题
消息发布方:
循环发布信息:Hello... 后缀数字编号
实现流程:
1.包含头文件
2.初始化 ROS 节点:命名(唯一)
3.实例化 ROS 句柄
4.实例化 发布者 对象
5.组织被发布的数据,并编写逻辑发布数据
*/
int main(int argc, char *argv[])
{
// 解决乱码问题
setlocale(LC_ALL,"");
// 2.初始化ROS节点,这里是节点名
ros::init(argc,argv,"besproma_pub_node");
// 3.实例化 ROS 句柄
ros::NodeHandle nh;
// 4.实例化发布者对象,参数是话题名,buffer大小
ros::Publisher pub = nh.advertise("besproma_topic",10);
// 以10HZ的平率发布数据
ros::Rate rate(10);
//设置编号,让数据发布时带上编号
int count = 0;
// 加入休眠 ros::Duration(3.0).sleep(); 延迟第一条数据的发送,防止前几条数据的丢失
ros::Duration(3.0).sleep();
// 5.组织被发布的数据,并编写逻辑发布数据,程序会一直在这里循环
std_msgs::String msg;
while(ros::ok()){
// 发布的内容和编号拼接
count++;
std::stringstream ss;
ss<<"hello ..."< 接收方(C++):
#include "ros/ros.h"
#include "sstream"
#include "std_msgs/String.h"
/*
需求: 实现基本的话题通信,一方发布数据,一方接收数据,
实现的关键点:
1.发送方
2.接收方
3.数据(此处为普通文本)
消息订阅方:
订阅话题并打印接收到的消息
实现流程:
1.包含头文件
2.初始化 ROS 节点:命名(唯一)
3.实例化 ROS 句柄
4.实例化 订阅者 对象
5.处理订阅的消息(回调函数)
6.设置循环调用回调函数
*/
// 回调函数
void doMsg(const std_msgs::String::ConstPtr& msg_p){
// 通过msg_p来获取并操作订阅到的数据
ROS_INFO("我收到了 %s",msg_p->data.c_str());
}
int main(int argc, char *argv[])
{
// 解决乱码问题
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点:命名(唯一)
ros::init(argc,argv,"besproma_sub_node");
// 3.实例化 ROS 句柄
ros::NodeHandle nh;
// 4.实例化订阅者对象,参数1是话题名(要保证和发布方的话题一致),参数2是buffer空间大小,参数3是回调函数
ros::Subscriber sub=nh.subscribe("besproma_topic",10,doMsg);
// 5.处理订阅的消息(回调函数)
// 6.设置循环调用回调函数
ros::spin();
return 0;
}
CMakeLists.txt
add_executable(besproma_pub src/demo1_pub.cpp)
add_executable(besproma_sub src/demo2_sub.cpp)
target_link_libraries(besproma_pub
${catkin_LIBRARIES}
)
target_link_libraries(besproma_sub
${catkin_LIBRARIES}
)
发布方(Python)
#! /usr/bin/env python
from rosgraph.names import SRV_EXT
import rospy
from std_msgs.msg import String
'''
需求: 实现基本的话题通信,一方发布数据,一方接收数据,
实现的关键点:
1.发送方
2.接收方
3.数据(此处为普通文本)
PS: 二者需要设置相同的话题
消息发布方:
循环发布信息:HelloWorld 后缀数字编号
实现流程:
1.导包
2.初始化 ROS 节点:命名(唯一)
3.实例化 发布者 对象
4.组织被发布的数据,并编写逻辑发布数据
'''
if __name__=="__main__":
# 2.初始化 ROS 节点:命名(唯一)
rospy.init_node("besproma_pub_node_py")
# 3.实例化 发布者 对象
pub = rospy.Publisher("besproma_topic",String,queue_size=10)
# 4.组织被发布的数据,并编写逻辑发布数据
msg = String() # 创建msg对象
msg_front = "hello 你好"
count = 0
rospy.sleep(3)
rate = rospy.Rate(1)
while not rospy.is_shutdown():
# 拼接字符串
count+=1
msg.data = msg_front + str(count)
pub.publish(msg)
rospy.loginfo("发布的数据 %s",msg.data)
rate.sleep()
订阅方(Python)
#! /usr/bin/env python
"""
需求: 实现基本的话题通信,一方发布数据,一方接收数据,
实现的关键点:
1.发送方
2.接收方
3.数据(此处为普通文本)
消息订阅方:
订阅话题并打印接收到的消息
实现流程:
1.导包
2.初始化 ROS 节点:命名(唯一)
3.实例化 订阅者 对象
4.处理订阅的消息(回调函数)
5.设置循环调用回调函数
"""
import rospy
from std_msgs.msg import String
def doMsg(msg):
rospy.loginfo("收到了 %s",msg.data)
if __name__=="__main__":
# 2.初始化 ROS 节点:命名(唯一)
rospy.init_node("besproma_sub_node_py")
# 3.实例化 订阅者 对象
rospy.Subscriber("besproma_topic",String,doMsg,queue_size=10)
# 4.处理订阅的消息(回调函数)
# 5.设置循环调用回调函数
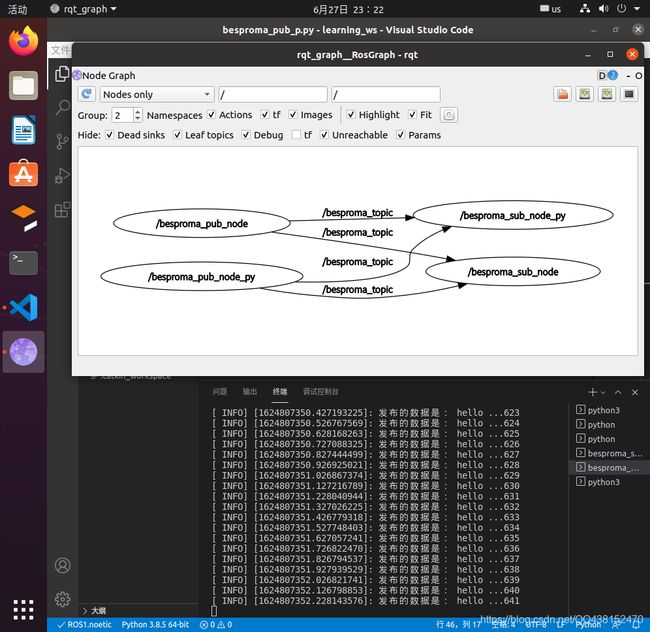
rospy.spin()当四个文件全部开启时的计算图:
自定义话题msg
Person.msg
string name
int32 age
float32 heightpackage.xml中添加编译依赖与执行依赖
message_generation
message_runtime
CMakeLists.txt编辑 msg 相关配置
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
# 需要加入 message_generation,必须有 std_msgs
# 配置 msg 源文件
add_message_files(
FILES
Person.msg
)
# 生成消息时依赖于 std_msgs
generate_messages(
DEPENDENCIES
std_msgs
)
#执行时依赖
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo02_talker_listener
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)VScode配置
c_cpp_properties.json
{
"configurations": [
{
"browse": {
"databaseFilename": "",
"limitSymbolsToIncludedHeaders": true
},
"includePath": [
"/opt/ros/noetic/include/**",
"/home/besproma//ROS_learning/learning_ws/src/learning_topic/include/**",
"/home/besproma/ROS_learning/learning_ws/devel/include/**",
"/usr/include/**"
],
"name": "ROS",
"cppStandard": "c++17"
}
],
"version": 4
}settings.json
{
"python.autoComplete.extraPaths": [
"/opt/ros/noetic/lib/python3/dist-packages"
],
"python.analysis.extraPaths": [
"/opt/ros/noetic/lib/python3/dist-packages",
"/home/besproma/ROS_learning/learning_ws/devel/lib/python3/dist-packages"
],
"files.associations": {
"sstream": "cpp"
}
}发布方C++代码
/*
需求: 循环发布人的信息
*/
#include "ros/ros.h"
#include "learning_topic/Person.h"
int main(int argc, char *argv[])
{
// 解决乱码问题
setlocale(LC_ALL,"");
ros::init(argc,argv,"besproma_pub_msg");
ros::NodeHandle nh;
ros::Publisher pub = nh.advertise("besproma_topic_msg",10);
learning_topic::Person per;
per.name = "besproma";
per.age = 21;
per.height = 100.88;
ros::Rate rate(10);
ros::Duration(3.0).sleep();
while(ros::ok()){
pub.publish(per);
ROS_INFO("发送的内容是 %s %d %.2f",per.name.c_str(),per.age,per.height);
rate.sleep();
ros::spinOnce();
}
return 0;
}
订阅方C++代码
#include "ros/ros.h"
#include "learning_topic/Person.h"
void doMsg(const learning_topic::Person::ConstPtr &msg_p){
ROS_INFO("名字: %s , 年龄: %d , 身高 %.2f ...", msg_p->name.c_str(), msg_p->age, msg_p->height);
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"besproma_sub_msg");
ros::NodeHandle nh;
ros::Subscriber sub = nh.subscribe("besproma_topic_msg",10,doMsg);
ros::spin();
return 0;
}
CMakeLists.txt
add_executable(besproma_pub_msg src/demo3_pub_msg.cpp)
add_executable(besproma_sub_msg src/demo4_sub_msg.cpp)
target_link_libraries(besproma_pub_msg
${catkin_LIBRARIES}
)
target_link_libraries(besproma_sub_msg
${catkin_LIBRARIES}
)发布方Python:
#! /usr/bin/env python
import rospy
from learning_topic.msg import Person
if __name__ =="__main__":
rospy.init_node("besproma_pub_msg.py")
pub = rospy.Publisher("besproma_topic_msg",Person,queue_size=10)
p = Person()
p.name = "besproma_py"
p.age = 1
p.height = 100.88
rospy.sleep(3)
rate = rospy.Rate(1)
while not rospy.is_shutdown():
pub.publish(p)
p.age=p.age+1
rospy.loginfo("姓名 %s, 年龄 %d, 身高:%.2f",p.name,p.age,p.height)
rate.sleep()订阅方Python:
#! /usr/bin/env python
import rospy
from learning_topic.msg import Person
def doPerson(p):
rospy.loginfo("姓名: %s,年龄: %d,身高%.2f",p.name,p.age,p.height)
if __name__=="__main__":
rospy.init_node("besproma_sub_msg_node")
rospy.Subscriber("besproma_topic_msg",Person,doPerson,queue_size=10)
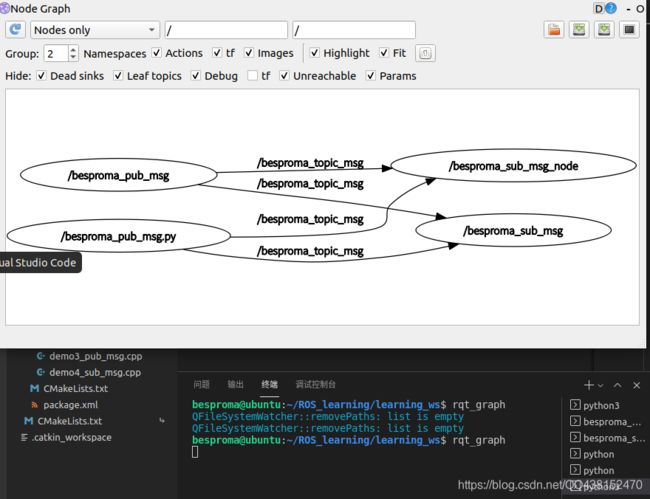
rospy.spin()4个节点都打开的计算图: