利用ceres库在激光SLAM中添加强度代价函数——来自IntensitySLAM
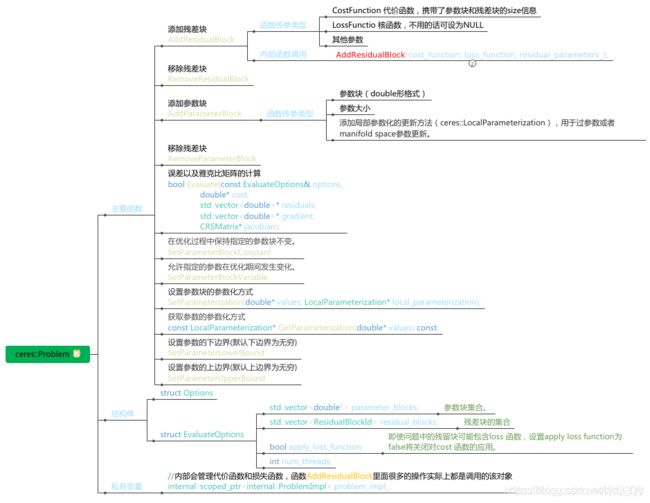
ceres库总览
雷达参数定义
lidar::Lidar::Lidar(){
}
//激光线数
void lidar::Lidar::setLines(double num_lines_in){
num_lines=num_lines_in;
}
//垂直方向俯仰角度
void lidar::Lidar::setVerticalAngle(double vertical_angle_in){
vertical_angle = vertical_angle_in;
}
//垂直方向分辨率
void lidar::Lidar::setVerticalResolution(double vertical_angle_resolution_in){
vertical_angle_resolution = vertical_angle_resolution_in;
}
//扫描周期时间
void lidar::Lidar::setScanPeriod(double scan_period_in){
scan_period = scan_period_in;
}
//最大距离
void lidar::Lidar::setMaxDistance(double max_distance_in){
max_distance = max_distance_in;
}
//最小距离
void lidar::Lidar::setMinDistance(double min_distance_in){
min_distance = min_distance_in;
}
参数初始化
void OdomEstimationClass::init(lidar::Lidar lidar_param){
//init local map
//角点
laserCloudCornerMap = pcl::PointCloud<pcl::PointXYZI>::Ptr(new pcl::PointCloud<pcl::PointXYZI>());
//平面点
laserCloudSurfMap = pcl::PointCloud<pcl::PointXYZI>::Ptr(new pcl::PointCloud<pcl::PointXYZI>());
//所有特征点
laserCloudDisMap = pcl::PointCloud<pcl::PointXYZI>::Ptr(new pcl::PointCloud<pcl::PointXYZI>());
//downsampling size 下采样尺寸
downSizeFilterEdge.setLeafSize(0.4, 0.4, 0.4);
downSizeFilterSurf.setLeafSize(0.8, 0.8, 0.8);
downSizeFilterDis.setLeafSize(0.4, 0.4, 0.4);
//kd-tree
kdtreeEdgeMap = pcl::KdTreeFLANN<pcl::PointXYZI>::Ptr(new pcl::KdTreeFLANN<pcl::PointXYZI>());
kdtreeSurfMap = pcl::KdTreeFLANN<pcl::PointXYZI>::Ptr(new pcl::KdTreeFLANN<pcl::PointXYZI>());
kdtreeDisMap = pcl::KdTreeFLANN<pcl::PointXYZI>::Ptr(new pcl::KdTreeFLANN<pcl::PointXYZI>());
//里程计初值为单位阵
odom = Eigen::Isometry3d::Identity();
last_odom = Eigen::Isometry3d::Identity();
max_lidar_distance = lidar_param.max_distance * 0.85;
optimization_count=12;
}
通过ceres库进行优化并将点添加到地图中
void OdomEstimationClass::updatePointsToMap(const pcl::PointCloud<pcl::PointXYZI>::Ptr& edge_in, const pcl::PointCloud<pcl::PointXYZI>::Ptr& surf_in){
if(optimization_count>4)
optimization_count--;
Eigen::Isometry3d odom_prediction = odom * last_odom.inverse() * odom;
last_odom = odom;
odom = odom_prediction;
normalizeIsometry(odom);//把旋转部分取出进行四元数单位化再赋值给矩阵的旋转部分
normalizeIsometry(last_odom);
q_w_curr = Eigen::Quaterniond(odom.rotation());
t_w_curr = odom.translation();
pcl::PointCloud<pcl::PointXYZI>::Ptr downsampledEdgeCloud(new pcl::PointCloud<pcl::PointXYZI>());
pcl::PointCloud<pcl::PointXYZI>::Ptr downsampledSurfCloud(new pcl::PointCloud<pcl::PointXYZI>());
pcl::PointCloud<pcl::PointXYZI>::Ptr downsampledDisCloud(new pcl::PointCloud<pcl::PointXYZI>());
//下采样到地图中
downSamplingToMap(edge_in,downsampledEdgeCloud,surf_in,downsampledSurfCloud, downsampledDisCloud);
pcl::PointCloud<pcl::PointXYZI>::Ptr tmpcloudptr_1(new pcl::PointCloud<pcl::PointXYZI>());
for(int i=0;i<downsampledDisCloud->points.size();i++)
tmpcloudptr_1->push_back(downsampledDisCloud->points[i]);
if(laserCloudCornerMap->points.size()>10 && laserCloudSurfMap->points.size()>50){
kdtreeEdgeMap->setInputCloud(laserCloudCornerMap);
kdtreeSurfMap->setInputCloud(laserCloudSurfMap);
kdtreeDisMap->setInputCloud(laserCloudDisMap);
for (int iterCount = 0; iterCount < optimization_count; iterCount++){//迭代12次
ceres::LossFunction *loss_function = new ceres::HuberLoss(0.1);//损失函数 用于去除异常值
// 残差大于0.1的点 ,则权重降低,具体效果看上面的公式. 小于0.1 则认为正常,不做特殊的处理 s s<0.1 2(sqrt(s+1)-1)
//problem类就是代表者具有双边约束的最小二乘问题
//为了创建一个最小二乘问题,需要使用
//Problem::AddResidalBlock() 添加残差模块
//Problem::AddParameterBlock() 添加参数模块
//先声明一个ceres::Problem::Options,然后再用Options初始化problem
ceres::Problem::Options problem_options;
ceres::Problem problem(problem_options);
//Problem::AddParameterBlock() 添加参数模块
//表示位姿增量double parameters[7] = {0, 0, 0, 1, 0, 0, 0}; 前 4 维是四元数,后 3 维是平移。
problem.AddParameterBlock(parameters, 7, new PoseSE3Parameterization());//优化初值
addIntensityCostFactor(downsampledDisCloud,laserCloudDisMap,problem,loss_function);
addEdgeCostFactor(downsampledEdgeCloud,laserCloudCornerMap,problem,loss_function);
addSurfCostFactor(downsampledSurfCloud,laserCloudSurfMap,problem,loss_function);
//配置求解器
ceres::Solver::Options options;
options.linear_solver_type = ceres::DENSE_QR;
options.max_num_iterations = 4;
options.minimizer_progress_to_stdout = false;
options.check_gradients = false;
options.gradient_check_relative_precision = 1e-4;
//求解
ceres::Solver::Summary summary;
ceres::Solve(options, &problem, &summary);
}
}else{
printf("not enough points in map to associate, map error");
}
//getSceneflow(last_downsampledDisCloud,tmpcloudptr_1);
last_downsampledDisCloud=pcl::PointCloud<pcl::PointXYZI>::Ptr(new pcl::PointCloud<pcl::PointXYZI>());
for(int i=0;i<tmpcloudptr_1->points.size();i++)
last_downsampledDisCloud->push_back(tmpcloudptr_1->points[i]);
q_w_curr.normalize();
odom.linear() = q_w_curr.toRotationMatrix();
odom.translation() = t_w_curr;
addPointsToMap(downsampledEdgeCloud,downsampledSurfCloud);
}
其中ceres库的主干如下
//1.构建优化问题
ceres::LossFunction *loss_function = new ceres::HuberLoss(0.1);//损失函数
//先声明一个ceres::Problem::Options,然后再用Options初始化problem
ceres::Problem::Options problem_options;
ceres::Problem problem(problem_options);
//Problem::AddParameterBlock() 添加参数模块
//表示位姿增量double parameters[7] = {0, 0, 0, 1, 0, 0, 0}; 前 4 维是四元数,后 3 维是平移。
problem.AddParameterBlock(parameters, 7, new PoseSE3Parameterization());//优化初值
//添加代价函数和损失函数
addIntensityCostFactor(downsampledDisCloud,laserCloudDisMap,problem,loss_function);
addEdgeCostFactor(downsampledEdgeCloud,laserCloudCornerMap,problem,loss_function);
addSurfCostFactor(downsampledSurfCloud,laserCloudSurfMap,problem,loss_function);
//2.配置求解器
ceres::Solver::Options options;
options.linear_solver_type = ceres::DENSE_QR;
options.max_num_iterations = 4;
options.minimizer_progress_to_stdout = false;
options.check_gradients = false;
options.gradient_check_relative_precision = 1e-4;
//3.求解
ceres::Solver::Summary summary;
ceres::Solve(options, &problem, &summary);
1.构建优化问题
1.1损失函数
ceres::LossFunction *loss_function = new ceres::HuberLoss(0.1);
残差大于0.1的点 ,则权重降低,具体效果看上面的公式. 小于0.1 则认为正常,不做特殊的处理
1.2创建求解的problem
ceres::Problem::Options problem_options; ceres::Problem problem(problem_options);
1.3添加参数块
表示位姿增量double parameters[7] = {0, 0, 0, 1, 0, 0, 0}; 前 4 维是四元数,后 3 维是平移。
problem.AddParameterBlock(parameters, 7, new PoseSE3Parameterization());//优化初值
优化变量PoseSE3Parameterization定义,是官方定义的LocalParameterization子类。
class PoseSE3Parameterization : public ceres::LocalParameterization {
public:
PoseSE3Parameterization() {}
virtual ~PoseSE3Parameterization() {}
virtual bool Plus(const double* x, const double* delta, double* x_plus_delta) const;
virtual bool ComputeJacobian(const double* x, double* jacobian) const;
virtual int GlobalSize() const { return 7; }//参数块 x 所在的环境空间的维度。
virtual int LocalSize() const { return 6; }// Δ 所在的切线空间的维度
};
LocalParameterization
> LocalParameterization类的作用是解决非线性优化中的过参数化问题。所谓过参数化,即待优化参数的实际自由度小于参数本身的自由度。例如在SLAM中,当采用四元数表示位姿时,由于四元数本身的约束(模长为1),实际的自由度为3而非4。此时,若直接传递四元数进行优化,冗余的维数会带来计算资源的浪费,需要使用Ceres预先定义的QuaternionParameterization对优化参数进行重构
其中的自定义的四元数加法和雅可比矩阵的计算方法如下:
- 向量到反对称矩阵转换函数skew
/* skew mat 向量到反对称矩阵的转换
* 0 1 2 0 -mat_in(2) mat_in(1)
* 0 1 2 0 0 -mat_in(0);
* 0 1 2 -mat_in(1) mat_in(0) 0
* */
Eigen::Matrix<double,3,3> skew(Eigen::Matrix<double,3,1>& mat_in){
Eigen::Matrix<double,3,3> skew_mat;
skew_mat.setZero();
skew_mat(0,1) = -mat_in(2);
skew_mat(0,2) = mat_in(1);
skew_mat(1,2) = -mat_in(0);
skew_mat(1,0) = mat_in(2);
skew_mat(2,0) = -mat_in(1);
skew_mat(2,1) = mat_in(0);
return skew_mat;
}
- 李代数到四元数的转换
/**
* @brief 根据李代数SE(3)计算位姿的四元数和平移向量
*
* @param se3 6维李代数SE(3)类型,表示位姿的旋转部分和平移部分的组合
* @param q 四元数对象,计算得到的位姿的旋转部分
* @param t 平移向量对象,计算得到的位姿的平移部分
*/
void getTransformFromSe3(const Eigen::Matrix<double,6,1>& se3, Eigen::Quaterniond& q, Eigen::Vector3d& t){
// 将6维李代数SE(3)中的旋转部分和平移部分分别赋值给对应的Eigen库中的向量对象
Eigen::Vector3d omega(se3.data()); // 旋转
Eigen::Vector3d upsilon(se3.data()+3); // 平移
// 计算旋转部分向量的反对称矩阵Omega
Eigen::Matrix3d Omega = skew(omega);
// 计算旋转部分向量的2范数
double theta = omega.norm();
double half_theta = 0.5*theta;
double imag_factor;
double real_factor = cos(half_theta);
// 计算四元数的虚部系数imag_factor
if(theta<1e-10)
{
double theta_sq = theta*theta;
double theta_po4 = theta_sq*theta_sq;
imag_factor = 0.5-0.0208333*theta_sq+0.000260417*theta_po4;
}
else
{
double sin_half_theta = sin(half_theta);
imag_factor = sin_half_theta/theta;
}
// 根据实部系数real_factor和虚部系数imag_factor,以及旋转部分向量omega计算四元数q
q = Eigen::Quaterniond(real_factor, imag_factor*omega.x(), imag_factor*omega.y(), imag_factor*omega.z());
Eigen::Matrix3d J;
// 计算变换矩阵J和平移向量t
if (theta<1e-10)
{
J = q.matrix();
}
else
{
Eigen::Matrix3d Omega2 = Omega*Omega;
J = (Eigen::Matrix3d::Identity() + (1-cos(theta))/(theta*theta)*Omega + (theta-sin(theta))/(pow(theta,3))*Omega2);
}
t = J*upsilon; // 平移向量t由变换矩阵J和平移部分向量upsilon相乘得到
}
- 自定义的李代数加法
/**
* @brief 实现李代数SE(3)的加法运算
*
* @param x 李代数SE(3)类型,表示位姿的旋转部分和平移部分的组合
* @param delta 变化量,可以看作李代数SE(3)中的扰动量
* @param x_plus_delta 李代数SE(3)类型,表示相加得到的新的位姿
* @return bool 返回值始终为true
*/
bool PoseSE3Parameterization::Plus(const double *x, const double *delta, double *x_plus_delta) const {
// 指定一个double数组的连续内存区域,并将其解释为Eigen库中的向量类型
Eigen::Map<const Eigen::Vector3d> trans(x + 4);
// 定义四元数对象和平移向量对象
Eigen::Quaterniond delta_q;
Eigen::Vector3d delta_t;
// 将6维李代数变换(delta)分别转换成四元数和平移向量进行描述
getTransformFromSe3(Eigen::Map<const Eigen::Matrix<double,6,1>>(delta), delta_q, delta_t);
// 指定一个double数组的连续内存区域,并将其解释为Eigen库中的常量四元数类型
Eigen::Map<const Eigen::Quaterniond> quater(x);
// 指定一个double数组的连续内存区域,并将其解释为Eigen库中的四元数类型
Eigen::Map<Eigen::Quaterniond> quater_plus(x_plus_delta);
// 指定一个double数组的连续内存区域,并将其解释为Eigen库中的向量类型
Eigen::Map<Eigen::Vector3d> trans_plus(x_plus_delta + 4);
// 新位姿的旋转部分由delta_q和原始位姿的旋转部分相乘得到
quater_plus = delta_q * quater;
// 新位姿的平移部分由delta_q和原始位姿的平移部分相乘并加上delta_t得到
trans_plus = delta_q * trans + delta_t;
return true;
}
- 自定义的雅可比矩阵计算
// PoseSE3Parameterization 类的 ComputeJacobian 函数实现
// 该函数用于计算长度为 7 的一维数组 x 对应的 6*7 Jacobian 矩阵,并将结果存储在 jacobian 指向的内存区域中
// 参数说明:
// x:长度为 7 的一维 double 数组
// jacobian:指向长度为 42(6*7)的 double 数组的指针
bool PoseSE3Parameterization::ComputeJacobian(const double *x, double *jacobian) const {
// 使用 Eigen 中的 Map 函数将 jacobian 数组映射到 Eigen Matrix 类型的对象 j 上,并指定其行优先存储方式。
Eigen::Map<Eigen::Matrix<double, 7, 6, Eigen::RowMajor>> j(jacobian);
// 设置 j 的前六行为单位矩阵,即对于每个旋转和平移参数,其导数为1。
(j.topRows(6)).setIdentity();
// 设置 j 的最后一行为零,因为位姿不受时间变量影响。
(j.bottomRows(1)).setZero();
// 返回 true 表示计算成功完成。
return true;
}
1.4 添加代价函数
addIntensityCostFactor添加强度残差计算
addIntensityCostFactor(downsampledDisCloud,laserCloudDisMap,problem,loss_function);
函数内部:
void OdomEstimationClass::addIntensityCostFactor(const pcl::PointCloud<pcl::PointXYZI>::Ptr& pc_in, const pcl::PointCloud<pcl::PointXYZI>::Ptr& map_in, ceres::Problem& problem, ceres::LossFunction *loss_function){
int dis_num=0;
for (int i = 0; i < (int)pc_in->points.size(); i++)
{
// if(pc_in->points[i].intensity<0.1)
// continue;
pcl::PointXYZI point_temp;
//将点从当前坐标转化为地图中的坐标
pointAssociateToMap(&(pc_in->points[i]), &point_temp);
std::vector<int> pointSearchInd;
std::vector<float> pointSearchSqDis;
//kdtreeEdgeMap->nearestKSearch(point_temp, 5, pointSearchInd, pointSearchSqDis);
if(kdtreeDisMap->radiusSearch(point_temp, 1.5, pointSearchInd, pointSearchSqDis)<3)//7
continue;
else if(pointSearchSqDis[0]<1.0){//最近距离小于1
float intensity_derivative[8]={0,0,0,0,0,0,0,0};
//根据强度信息计算导数,差分近似,将目标点半径1.5m内的点的平均强度减去当前点的强度作为导数
calculateDerivative(map_in->points[i],pointSearchInd,map_in,intensity_derivative);
Eigen::Vector3d curr_point(pc_in->points[i].x, pc_in->points[i].y, pc_in->points[i].z);
Eigen::Vector3d nearest_point(map_in->points[pointSearchInd[0]].x,map_in->points[pointSearchInd[0]].y,map_in->points[pointSearchInd[0]].z);
//代价函数创建,构造函数为传入导数值
ceres::CostFunction *cost_function = new IntensityAnalyticCostFunction(curr_point, nearest_point, pc_in->points[i].intensity - map_in->points[pointSearchInd[0]].intensity, intensity_derivative, 1.0);
problem.AddResidualBlock(cost_function, loss_function, parameters);
dis_num++;
}
}
if(dis_num<10){
printf("not enough correct points");
}
}
IntensityAnalyticCostFunction定义
- 定义:
class IntensityAnalyticCostFunction : public ceres::SizedCostFunction<1, 7> {
public:
IntensityAnalyticCostFunction(Eigen::Vector3d curr_point_, Eigen::Vector3d nearest_point_, float intensity_residual_, float intensity_derivative_[], float weight);
virtual ~IntensityAnalyticCostFunction() {}
virtual bool Evaluate(double const *const *parameters, double *residuals, double **jacobians) const;
Eigen::Vector3d curr_point;
Eigen::Vector3d nearest_point;
double intensity_residual;
double intensity_derivative[8];
double weight;
};
-
Evaluate函数
这个函数计算给定参数的强度分析代价函数
输入参数包括相机当前姿态的四元数和平移向量
函数将当前点从相机坐标系转换到世界坐标系
代价函数由当前点的强度与地图上最近点的强度之间的差异构成
函数同时计算雅可比矩阵,用于在捆绑调整BA过程中优化参数
/**
@brief 对当前点的强度与最近邻点的强度之差进行成本函数的评估
@param parameters 一个二重指针,包含当前帧的四元数和平移向量信息
@param residuals 存储残差的数组,计算成本函数得到的值
@param jacobians 存储雅可比矩阵的二重指针,用于优化求解
@return bool 始终返回true
*/
bool IntensityAnalyticCostFunction::Evaluate(double const *const *parameters, double *residuals, double **jacobians) const
{
// 将四元数和平移向量从输入参数中映射到Eigen向量中
Eigen::Map<const Eigen::Quaterniond> q_w_curr(parameters[0]);
Eigen::Map<const Eigen::Vector3d> t_w_curr(parameters[0] + 4);
// 将当前点从当前坐标系转换到世界坐标系
Eigen::Vector3d point_w = q_w_curr * curr_point + t_w_curr;
//f(xi) = I(p)- I(p')
//I(p) = xyz_radius * delta_intensity
// 计算当前点与地图上最近点之间的距离
double delta_x = point_w.x()-nearest_point.x();
double delta_y = point_w.y()-nearest_point.y();
double delta_z = point_w.z()-nearest_point.z();
double xy_radius_square = std::max(delta_x*delta_x+delta_y*delta_y,0.0000004);
double xy_radius = std::sqrt(xy_radius_square);
double xyz_radius_square = std::max(xy_radius_square + delta_z*delta_z,0.0000004);
double xyz_radius = std::sqrt(xyz_radius_square);
double theta_1 = std::atan2(delta_z,xy_radius);
double theta_2 = std::atan2(delta_y,delta_x);
// 初始化四元数和旋转角度
double q1 = 0.0;
double q2 = 0.0;
double q3 = 0.0;
double q4 = 0.0;
double angle_shifts = 0.0;
/**
如果 theta_2 的值大于等于 -0.75M_PI 并且小于 -0.25M_PI,则对变量 q1、q2、q3 和 q4 分别进行计算并赋值,最后将 angle_shifts 赋为 0.5*M_PI。
在下一个 else if 语句中,如果 theta_2 的值大于等于 -0.25M_PI 并且小于 0.25M_PI,则对变量 q1、q2、q3 和 q4 分别进行计算并赋值,最后将 angle_shifts 赋为 0.0。
在下一个 else if 语句中,如果 theta_2 的值大于等于 0.25M_PI 并且小于 0.75M_PI,则对变量 q1、q2、q3 和 q4 分别进行计算并赋值,最后将 angle_shifts 赋为 -0.5*M_PI。
在最后的 else 语句中,如果 theta_2 的值不属于上述范围,则对变量 q1、q2、q3 和 q4 分别进行计算并赋值,最后将 angle_shifts 赋为 0.0。
*/
if(theta_2>=-0.75*M_PI &&theta_2<-0.25*M_PI){
q1 = (intensity_derivative[2]+intensity_derivative[6])/2;
q2 = (intensity_derivative[2]-intensity_derivative[6])/2;
q3 = (intensity_derivative[3]+intensity_derivative[7])/2;
q4 = (intensity_derivative[3]-intensity_derivative[7])/2;
angle_shifts = 0.5*M_PI;
}else if(theta_2>=-0.25*M_PI &&theta_2<0.25*M_PI){
q1 = (intensity_derivative[0]+intensity_derivative[2])/2;
q2 = (intensity_derivative[0]-intensity_derivative[2])/2;
q3 = (intensity_derivative[1]+intensity_derivative[3])/2;
q4 = (intensity_derivative[1]-intensity_derivative[3])/2;
angle_shifts = 0.0;
}else if(theta_2>=0.25*M_PI &&theta_2<0.75*M_PI){
// p1 = (intensity_derivative[4]+intensity_derivative[0])/2 + (intensity_derivative[4]-intensity_derivative[0])/2 *(sin(2*(theta_2-0.5*M_PI)));
// p2 = (intensity_derivative[5]+intensity_derivative[1])/2 + (intensity_derivative[5]-intensity_derivative[1])/2 *(sin(2*(theta_2-0.5*M_PI)));
q1 = (intensity_derivative[4]+intensity_derivative[0])/2;
q2 = (intensity_derivative[4]-intensity_derivative[0])/2;
q3 = (intensity_derivative[5]+intensity_derivative[1])/2;
q4 = (intensity_derivative[5]-intensity_derivative[1])/2;
angle_shifts = -0.5*M_PI;
}else{
// p1 = (intensity_derivative[6]+intensity_derivative[4])/2 + (intensity_derivative[6]-intensity_derivative[4])/2 *(sin(2*(theta_2)));
// p2 = (intensity_derivative[7]+intensity_derivative[5])/2 + (intensity_derivative[7]-intensity_derivative[5])/2 *(sin(2*(theta_2)));
q1 = (intensity_derivative[6]+intensity_derivative[4])/2;
q2 = (intensity_derivative[6]-intensity_derivative[4])/2;
q3 = (intensity_derivative[7]+intensity_derivative[5])/2;
q4 = (intensity_derivative[7]-intensity_derivative[5])/2;
angle_shifts = 0.0;
}
double p1 = q1 + q2 *(sin(2*(theta_2 + angle_shifts)));
double p2 = q3 + q4 *(sin(2*(theta_2 + angle_shifts)));
double delta_intensity = (p1+p2)/2 + (p1-p2)/2 * sin(2*theta_1);
residuals[0] = weight * (delta_intensity - intensity_residual);
//residuals[0] = xyz_radius;
//residuals[0] = xyz_radius * delta_intensity;
Eigen::Matrix<double, 1, 2> dintensity_by_dtheta;
dintensity_by_dtheta(0,0) = (p1 - p2) * cos(2*theta_1);
dintensity_by_dtheta(0,1) = (q2 + q4 + (q2 - q4) * sin(2*theta_1)) * cos(2*(theta_2 + angle_shifts));
Eigen::Matrix<double, 2, 3> dtheta_by_dp;
dtheta_by_dp(0,0) = -delta_x*delta_z/(xy_radius*xyz_radius_square);
dtheta_by_dp(0,1) = -delta_y*delta_z/(xy_radius*xyz_radius_square);
dtheta_by_dp(0,2) = xy_radius/(xyz_radius_square);
dtheta_by_dp(1,0) = -delta_y/xy_radius_square;
dtheta_by_dp(1,1) = delta_x/xy_radius_square;
dtheta_by_dp(1,2) = 0.0;
Eigen::Matrix<double, 1, 3> dradius_by_dp;
dradius_by_dp(0,0) = delta_x/xyz_radius;
dradius_by_dp(0,1) = delta_y/xyz_radius;
dradius_by_dp(0,2) = delta_z/xyz_radius;
Eigen::Vector3d test_vector(delta_x/xyz_radius,delta_y/xyz_radius,delta_z/xyz_radius);
if(jacobians != NULL)
{
if(jacobians[0] != NULL)
{
Eigen::Matrix3d skew_point_w = skew(point_w);
Eigen::Matrix<double, 3, 6> dp_by_so3;
dp_by_so3.block<3,3>(0,0) = -skew_point_w;
(dp_by_so3.block<3,3>(0, 3)).setIdentity();
Eigen::Map<Eigen::Matrix<double, 1, 7, Eigen::RowMajor>> J_se3(jacobians[0]);
J_se3.setZero();
//[f(x,y,z)g(x,y,z)]' = f'(x,y,z)g(x,y,z)+f(x,y,z)g'(x,y,z)
// J_se3.block<1,6>(0,0) = dradius_by_dp * dp_by_so3;
J_se3.block<1,6>(0,0) = weight * (/*dradius_by_dp * delta_intensity + */xyz_radius * dintensity_by_dtheta * dtheta_by_dp) * dp_by_so3; //不加radius 效果好一点????
}
}
return true;
}
强度导数计算
void OdomEstimationClass::calculateDerivative(pcl::PointXYZI& point_in, std::vector<int>& pointSearchInd, const pcl::PointCloud<pcl::PointXYZI>::Ptr& map_in, float intensity_derivative[]){
//calculate average
//calculate derivative
///0 x,y,z>=0
///1 x>0,y>0,z<0
///2 x>0,y<0,z>0
///3 x>0,y<0,z<0
///4 x<0,y>0,z>0
///5 x<0,y>0.z<0
///6 x<0,y<0,z>0
///7 x<0,y<0,z<0
int intensity_count[8]={0,0,0,0,0,0,0,0};
//根据点的坐标判断方向,类似于八叉树
for(int i=1;i<(int)pointSearchInd.size();i++){
int position_id = 0;
//第i个点离最近点的x方向距离小于0 position_id+4
if(map_in->points[pointSearchInd[i]].x - map_in->points[pointSearchInd[0]].x >= 0){
position_id+=0;
}else{
position_id+=4;
}
//第i个点离最近点的y方向距离小于0 position_id+2
if(map_in->points[pointSearchInd[i]].y - map_in->points[pointSearchInd[0]].y >= 0){
position_id+=0;
}else{
position_id+=2;
}
//第i个点离最近点的z方向距离小于0 position_id+1
if(map_in->points[pointSearchInd[i]].z - map_in->points[pointSearchInd[0]].z >= 0){
position_id+=0;
}else{
position_id+=1;
}
intensity_count[position_id] += 1;
intensity_derivative[position_id]+= map_in->points[pointSearchInd[i]].intensity;
}
//assign to derivative
for(int i=0;i<8;i++){
if(intensity_count[i]!=0)
intensity_derivative[i] = intensity_derivative[i]/intensity_count[i] - map_in->points[pointSearchInd[0]].intensity;
else
intensity_derivative[i] = -1;// - map_in->points[pointSearchInd[0]].intensity;
}
}
addEdgeCostFactor 为边角点添加残差块
addSurfCostFactor 为表面点添加残差块
addEdgeCostFactor(downsampledEdgeCloud,laserCloudCornerMap,problem,loss_function); addSurfCostFactor(downsampledSurfCloud,laserCloudSurfMap,problem,loss_function);