Cesium中的相机—setView&lookAtTransform
作为相机系列,此处先温习一下前期涉及到Cesium中Camera的两个概念(系列文章可参考我前面发的“Cesium中的相机–”系列)。
回顾
相机的空间位置
Cesium中,世界坐标系就是地球的WGS84系,也即地球固连坐标系(Earth Fiexed),在此坐标中定义相机的位置与观测方位。
相机坐标系见下图(使用Hubble望远镜示意相机),在Camera对象中,通常用三个矢量来表示:Up、Right和Direction,这三个方向确定了相机的观测方位。Up、Right、Direction与相机坐标系(视图坐标系)XYZ三轴的关系为:
X=Direction
Y=Left
Z=Up
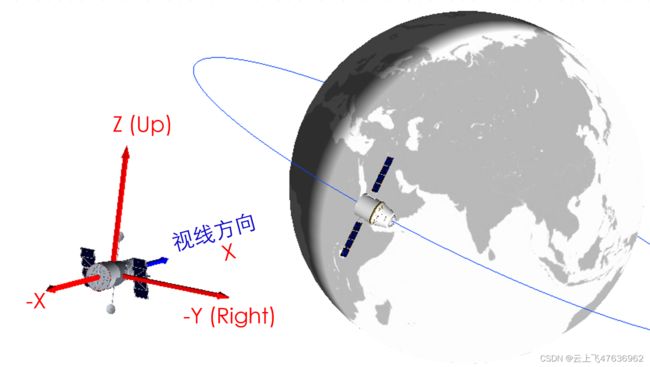
Heading/Pitch/Roll的定义
在Cesium中,常使用Heading/Pitch/Roll三个参数来表示相机相对某坐标系的姿态:
- Heading,表示相机绕Up轴旋转,Up轴为+Z轴,且定义绕-Z轴旋转为正。
- Pitch,表示相机绕Right轴旋转,Right轴为-Y轴,且定义绕-Y轴旋转为正。
- Roll,表示相机绕Direction轴(视线方向)旋转,Direction轴为+X轴,且绕+X轴旋转为正。
相机的三个旋转方向见下图示意,同时给出了Cesium中相机的Up/Right/Direction三个轴与X/Y/Z轴的关系。

SetView
温顾了上述两个知识点,下面直接给出SetView的定义
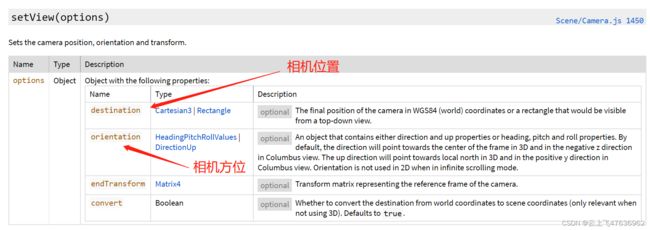
Camera中的SetView函数用来设置相机的位置和方位的。
相机位置由destination指定,通常使用三维笛卡尔坐标(Cartesian3)来确定,此坐标默认为世界坐标系(即WGS84系)下,显然,destination距离地球越远,则视场内地球越小。
相机的方位由orientaiton参数指定,有两种方式:1)HeadingPitchRoll三个参数;2)DirectionUp两个参数。
下图左图给出了Cesium中SetView函数时,相机的初始方位:
- 相机的视线(Direction)方向与当地北向重合
- 相机的上方向(Up)与当地天顶方向(地心-相机位置矢量方向)

因此,基于相机的初始方位,可以使用HeadingPitchRoll三个参数来表示相机的具体方位,具体转换过程见上面有关HeadingPitchRoll的阐述。
简单举个例子,如果我们想要相机看向地心,那么为上图右图所示。可知,只要将相机从初始方位沿着Y轴旋转90°(对应的Pitch角度为-90°)即可。
当然,使用Direction和Up两个参数也可以指定相机的方位,简介明了,但是需要给出两个具体的矢量方向。
下面直接以代码给出几个示例:
// 1. Top-Down视角。此处仅设置相机位置,函数内部将Pitch设置为-90°,实现向地心看的效果
viewer.camera.setView({
destination : Cesium.Cartesian3.fromDegrees(-117.16, 32.71, 15000.0)
});
// 2 采用Heading,Pitch,roll参数 设置相机方位
viewer.camera.setView({
destination : Cesium.Cartesian3.fromDegrees(0, 0, 10000000), //赤道上空1000km高度
orientation: {
heading : Cesium.Math.toRadians(90.0), // 相机方向指向当地东向
pitch : Cesium.Math.toRadians(-90), // 再将相机方向转向地心,此时Up方向指向当地东向
roll : 0.0
}
});
// 3. 采用Heading,Pitch,roll参数设置相机方位,相机位置没有设置,则采用原来的位置!
viewer.camera.setView({
orientation: {
heading : Cesium.Math.toRadians(90.0), // 相机方向指向当地东向
pitch : Cesium.Math.toRadians(-90), // 再将相机方向转向地心,此时Up方向指向当地东向
roll : 0.0
}
});
// 4. 相机位置使用矩形定义,相机方位为缺省设置(内部pitch=-90°),实现看地心效果
viewer.camera.setView({
destination : Cesium.Rectangle.fromDegrees(west, south, east, north)
});
// 5. 使用direction和up矢量方向直接定义相机的方位
viewer.camera.setView({
destination : Cesium.Cartesian3.fromDegrees(-122.19, 46.25, 5000.0), // 相机的位置
orientation : {
direction : new Cesium.Cartesian3(-0.042312, -0.201232, -0.978629), //相机视线方向矢量(WGS84系下)
up : new Cesium.Cartesian3(-0.479345, -0.855321, 0.1966022) //相机的up方向矢量(WGS84系下)
}
});
lookAtTransform
setView函数直接确定了相机在世界坐标系的位置,而且相机的方向可以任意指定。但是在Cesium中,我们常常有一种跟随对象的视角,也就是相机始终跟随运动的对象(如下图的飞行中的龙飞船)。鼠标无论怎么调整视角,相机的方向始终对着龙飞船,也就是说相机的参考系不再是世界坐标系了,而是飞船局部坐标系。
lookAtTransform函数的定义见下图,它的主要功能是:设定一个局部的参考系,让相机始终朝着局部参考系的原点。
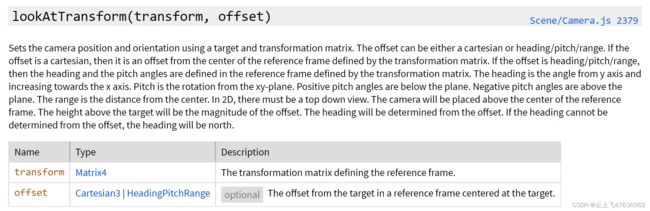
在上面定义中,两个参数的说明如下,可结合下图来看。
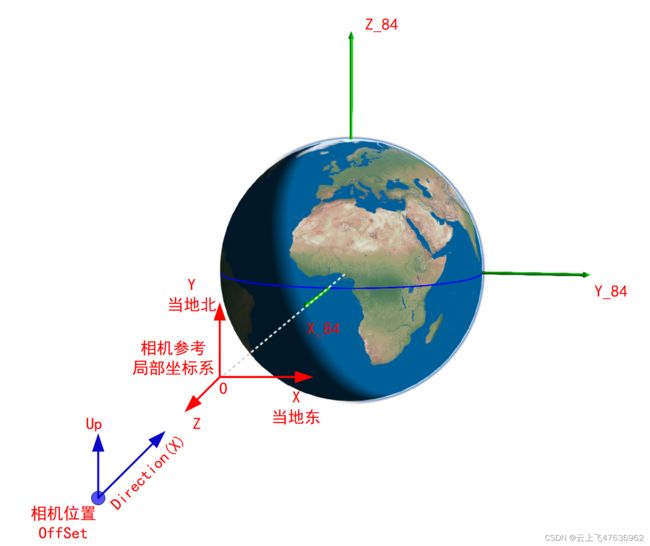
- transform是相机参考的局部坐标系到世界坐标系的齐次坐标转换矩阵(Matrix4),通过此4×4的矩阵,可以把局部坐标系的位置直接转换到世界坐标系中(包含旋转和平移,详细参考另一篇文章:Cesium中的相机—齐次坐标与坐标变换)。此局部坐标系一般为地面某点的“east-north-up”坐标系或者运行的卫星轨道坐标系,见下图中的o-XYZ坐标系。
- offset有两种类型,此处只讲一种:Cartesian3,即笛卡尔坐标,表示相机在局部坐标系中的位置,如下图中的OP矢量即表示相机的offset参数。
- 相机的位置有了,那么相机的方位如何确定?见下图:相机的方向,即Direction始终指向局部坐标系的中心;相机的Up方向约束在局部坐标系的Z方向。

lookAtTransform的用途非常广泛,可以将相机设置为任何局部坐标系,而局部坐标是通过Matrix4矩阵表示。
下面直接以代码给出示例:
// 在赤道上零经度上空一点,局部坐标系为:east-north-up坐标系,X:当地东向,Y:当地北向,Z:当地天顶方向,即世界坐标系的x方向
// transform为局部坐标系到世界坐标系的齐次转换矩阵(包含旋转和平移)
const transform = Cesium.Transforms.eastNorthUpToFixedFrame(Cesium.Cartesian3.fromDegrees(0, 0, 10000000));
// 相机设置在局部坐标系的(0,0,1000)处,相机的视线方向指向局部坐标系零点,本例中,也就是从局部坐标系的Z轴向原点看,在世界坐标系下看就是向地心看
// 注意,由于此时视线方向与Z轴重合,所以程序内部将up方向设置为局部坐标系的Y方向,本例中也就是世界坐标系的Z方向。见下图示意。
var offset = new Cesium.Cartesian3(0, 0, 1000);
viewer.camera.lookAtTransform(transform, offset);
下图为上个例子的代码对应的示意图
另一个例子就是地球惯性系的视角,也即地球在自转的效果,参见下面代码,这个也是Cesium官方给出的例子
// 根据当前场景时间实时计算视角
// 此函数被注册到scene.preRender事件中
function icrf(scene, time) {
// 不是3D窗口,直接返回
if (scene.mode !== Cesium.SceneMode.SCENE3D) {
return;
}
// 本例中,相机的局部坐标系就是地球惯性系,原点和世界坐标系重合,因此只有旋转,没有平移
// 计算当前时刻,地球惯性系(icrf)到固定系(Fixed,也就是世界坐标系WGS84)的转换矩阵
var icrfToFixed = Cesium.Transforms.computeIcrfToFixedMatrix(time);
// 此处判断icrfToFixed是因为有可能上面代码返回为undefined
if (Cesium.defined(icrfToFixed)) {
// Maxtrix4形式,注意,此处没有平移,因为原点重合
var transform = Cesium.Matrix4.fromRotationTranslation(icrfToFixed);
// 当前相机的位置(相对局部坐标系的位置)
var offset = Cesium.Cartesian3.clone(scene.camera.position);
scene.camera.lookAtTransform(transform, offset);
}
}
// 每次场景更新时都调用函数icrf调整视角
viewer.scene.preRender.addEventListener(icrf);
通过以上两个例子可知,我们只要提供了想要的局部坐标系到世界坐标系的齐次转换矩阵(Matrix4形式),那么就可以将相机局限在我们想要的局部坐标系中!!