【OpenVINOSharp】 基于C#和OpenVINO2023.0部署Yolov8全系列模型
基于C#和OpenVINO2023.0部署Yolov8全系列模型
- 1 项目简介
-
- 1.1 OpenVINOTM
- 2 OpenVinoSharp
-
- 2.1 OpenVINOTM 2023.0安装配置
- 2.2 C++ 动态链接库
- 2.3 C#构建Core推理类
- 2.4 NuGet安装OpenVinoSharp
- 3 获取和转换Yolov8模型
-
- 3.1 安装ultralytics
- 3.2 导出yolov8模型
- 3.3 安装OpenVINOTM Python版
- 4 OpenVinoSharp部署Yolov8模型
-
- 4.1 Yolov8-det预测结果
- 4.2 Yolov8-cls预测结果
- 4.3 Yolov8-seg预测结果
- 4.4 Yolov8-pose预测结果
文章原文收录在英特尔物联网:基于 C# 和 OpenVINO™ 2023.0部署 YOLOv8 全系列模型 | 开发者实战
1 项目简介
1.1 OpenVINOTM
英特尔发行版 OpenVINO™ 工具套件基于oneAPI 而开发,可以加快高性能计算机视觉和深度学习视觉应用开发速度工具套件,适用于从边缘到云的各种英特尔平台上,帮助用户更快地将更准确的真实世界结果部署到生产系统中。通过简化的开发工作流程, OpenVINO™ 可赋能开发者在现实世界中部署高性能应用程序和算法。
在推理后端,得益于 OpenVINO™ 工具套件提供的“一次编写,任意部署”的特性,转换后的模型能够在不同的英特尔硬件平台上运行,而无需重新构建,有效简化了构建与迁移过程。可以说,如果开发者希望在英特尔平台上实现最佳的推理性能,并具备多平台适配和兼容性, OpenVINO™ 是不可或缺的部署工具首选。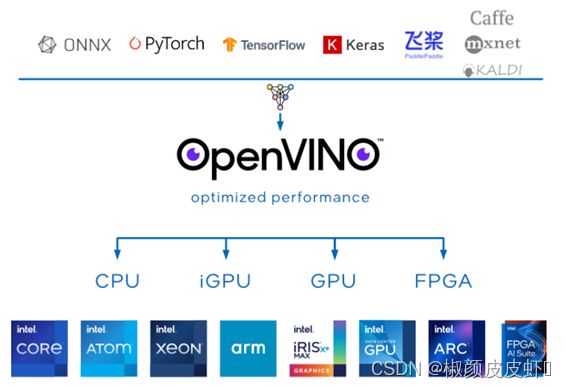

GitHub: https://github.com/guojin-yan/OpenVinoSharp.git
Gitee: https://gitee.com/guojin-yan/OpenVinoSharp.git
2 OpenVinoSharp
C#是微软公司发布的一种由C和C++衍生出来的面向对象的编程语言、运行于.NET Framework和.NET Core(完全开源,跨平台)之上的高级程序设计语言。但OpenVINOTM未提供C#语言接口,因此无法直接在C#中使用,之前发布的文章《在C#中调用OpenVINO™ 模型》通过动态链接库特性,实现了在C#中调用OpenVINOTM部署深度学习模型,简称:OpenVinoSharp。目前根据日常使用以及OpenVINOTM升级,OpenVinoSharp也进行了相应的改进。
目前OpenVinoSharp 2.1已经推出,支持OpenVINOTM 2023.0版本,图 4中给出了OpenVinoSharp实现原理。
2.1 OpenVINOTM 2023.0安装配置
访问OpenVINOTM (openvino.ai)官网,进入到下载页面,按照图 5 进行选择,最后进行下载,下载后将文件解压到C:\Program Files (x86)\Intel文件夹下,并在Path环境变量下增加线面的环境变量:
C:\Program Files (x86)\Intel\openvino_2023.0.0.10926\runtime\bin\intel64\Debug
C:\Program Files (x86)\Intel\openvino_2023.0.0.10926\runtime\bin\intel64\Release
C:\Program Files (x86)\Intel\openvino_2023.0.0.10926\runtime\3rdparty\tbb\bin
对于C++项目,增加以下配置:
Release模式下:
包含目录:
C:\Program Files (x86)\Intel\openvino_2023.0.0.10926\runtime\include
C:\Program Files (x86)\Intel\openvino_2023.0.0.10926\runtime\include\ie
库目录
C:\Program Files (x86)\Intel\openvino_2023.0.0.10926\runtime\lib\intel64\Release
附加依赖项
openvino.lib
Debug模式
包含目录
C:\Program Files (x86)\Intel\openvino_2023.0.0.10926\runtime\include
C:\Program Files (x86)\Intel\openvino_2023.0.0.10926\runtime\include\ie
库目录
C:\Program Files (x86)\Intel\openvino_2023.0.0.10926\runtime\lib\intel64\Debug
附加依赖项
openvinod.lib

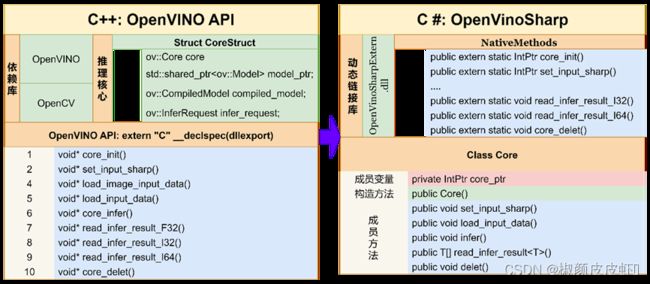
2.2 C++ 动态链接库
C++可以封装dll动态链接库,由于C#是基于C/C++发展来的一门语言,因此C#可以通过动态链接库的形式调用C++代码。下面简单对动态链接库接口进行介绍,具体实现可以参考源码。
(1)推理引擎结构体
Core是OpenVINOTM 工具套件里的推理核心类,该类下包含多个方法,可用于创建推理中所使用的其他类。在此处,需要在各个方法中传递模型信息,因此选择构建一个推理引擎结构体,用于存放各个变量。
// @brief 推理核心结构体
typedef struct openvino_core {
ov::Core core; // core对象
std::shared_ptr model_ptr; // 读取模型指针
ov::CompiledModel compiled_model; // 模型加载到设备对象
ov::InferRequest infer_request; // 推理请求对象
} CoreStruct;
其中Core是OpenVINO工具套件里的推理机核心;shared_ptr是读取本地模型的方法,可支持读取Paddlepaddle飞桨模型、ONNX模型以及IR模型;CompiledModel主要是将读取的本地模型映射到计算内核,由所指定的设备编译模型;InferRequest是一个推理请求类,在推理中主要用于对推理过程的操作。CoreStruct结构体指针会贯穿下面的各个接口方法,实现模型信息的传递。
(2)初始化推理模型
OpenVINO推理引擎结构体是联系各个方法的桥梁,后续所有操作都是在推理引擎结构体中的变量上操作的,为了实现数据在各个方法之间的传输,因此在创建推理引擎结构体时,采用的是创建结构体指针,并将创建的结构体地址作为函数返回值返回。推理初始化接口主要整合了原有推理的初始化Core对象、读取本地推理模型、载入模型到执行硬件和创建推理请求步骤,并将这些步骤所创建的变量放在推理引擎结构体中。
初始化推理模型接口方法为:
EXTERN_C __MIDL_DECLSPEC_DLLEXPORT void* STDMETHODCALLTYPE core_init(const wchar_t* w_model_dir, const wchar_t* w_device, const wchar_t* w_cache_dir);
其中w_model_dir为推理模型本地地址,w_device为模型运行设备名,w_cache_dir是缓存文件路径。
(3)配置输入数据形状
OpenVINOTM 2022.1之后的版本支持了模型的动态输入并且支持动态设置模型输入形状,因此此处增加了模型形状设置接口:
EXTERN_C __MIDL_DECLSPEC_DLLEXPORT void* STDMETHODCALLTYPE set_input_sharp(
void* core_ptr, const wchar_t* w_node_name, size_t * input_shape, int input_size);
其中core_ptr是CoreStruct结构体指针,在读取模型后,后续所有操作都是基于该结构体实现的;w_node_name是待修改模型节点,input_shape是模型节点,input_size是形状长度。
(4)配置输入数据
模型读取后就需要项模型中加载推理数据,常见的推理数据为图片数据,图片一般为一个三通道的二维数据,因此无法直接在C#与C++中传递,在该项目中主要是将图片数据转为二进制数据数据进行传递,下面接口实现了图片数据的加载:
EXTERN_C __MIDL_DECLSPEC_DLLEXPORT void* STDMETHODCALLTYPE load_image_input_data(void* core_ptr, const wchar_t* w_node_name, uchar * image_data, size_t image_size, int type);
其中w_node_name为莫模型输入节点名,image_data为图片数据的二进制数组,image_size为图片数据长度,type为数据处理方式,目前已经实现了常规变换、仿射变换、均方差归一化和常规归一化等方式。除了图片输入,一些模型还要求其他数据的输入,因此在该方法中,还增加了常规数据的加载方法:
EXTERN_C __MIDL_DECLSPEC_DLLEXPORT void* STDMETHODCALLTYPE load_input_data(void* core_ptr, const wchar_t* w_node_name, float* input_data);
(5)模型推理
将数据加载到模型后,就可以进行模型的推理,获取模型的推理结果,下面方法中封装了模型推理的方法,可以实现加载的数据进行推理。
EXTERN_C __MIDL_DECLSPEC_DLLEXPORT void* STDMETHODCALLTYPE core_infer(void* core_ptr);
(6)读取推理结果
在进行完模型推理后,就可以获取模型的推理结果,由于不同模型要求的数据格式不同,此处封装了float和int数据的读取方式:
EXTERN_C __MIDL_DECLSPEC_DLLEXPORT void STDMETHODCALLTYPE read_infer_result_I32(void* core_ptr, const wchar_t* w_node_name, int* infer_result);
EXTERN_C __MIDL_DECLSPEC_DLLEXPORT void STDMETHODCALLTYPE read_infer_result_I64(void* core_ptr, const wchar_t* w_node_name, long long* infer_result);
其中w_node_name为输出节点名称,infer_result为推理结果数组指针。
(7)删除推理核心结构体指针
推理完成后,我们需要将在内存中创建的推理核心结构地址删除,防止造成内存泄露,影响电脑性能,其接口该方法为:
EXTERN_C __MIDL_DECLSPEC_DLLEXPORT void STDMETHODCALLTYPE core_delet(void* core_ptr);
2.3 C#构建Core推理类
上一步中我们将模型推理方法封装到了dll动态链接库中,生成了OpenVinoSharpExtern.dll文件,在C#中可以通过[DllImport()]方式通过函数名称与参数对应,将C++中的方法引入当C#中。
private const string dll_extern = " OpenVinoSharpExtern.dll";
[DllImport(dll_extern, CharSet = CharSet.Unicode, CallingConvention = CallingConvention.Cdecl)]
public extern static IntPtr core_init(string model_dir, string device, string w_cache_dir);
上述代码通过core_init名称对应和参数返回指定应,将core_init()方法引入到C#中,同样的方式,可以将其他方法引入到C#中。
上一步我们引入了封装的OpenVINO动态链接库,为了更方便的使用,将其封装到Core类中。在不同方法之间,主要通过推理核心结构体指针在各个方法之间传递,在C#是没有指针这个说法的,不过可以通过IntPtr结构体来接收这个指针,为了防止该指针被篡改,将其封装在类中作为私有成员使用。
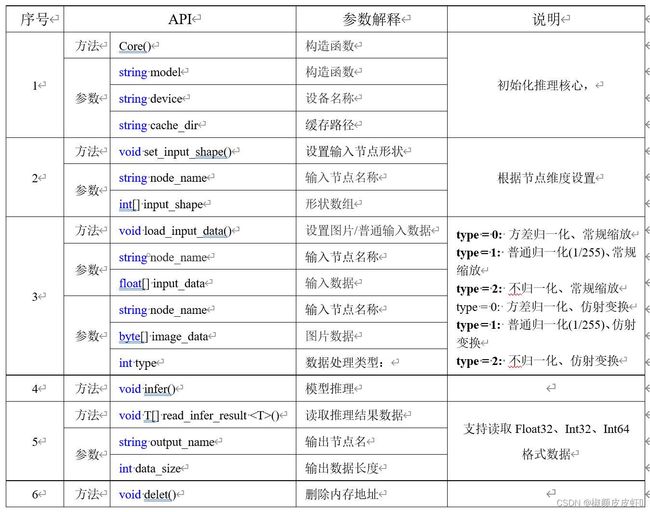
根据模型推理的步骤,构建模型推理类,表 1 中个除了构建的Core模型推理类的API接口,具体代码实现可以参考源码。
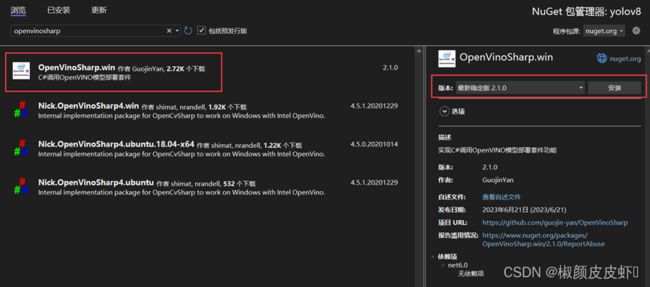
2.4 NuGet安装OpenVinoSharp
为了方便使用OpenVinoSharp,该项目提供了NuGet包,使用者可以直接通过NuGet包管理器直接安装使用,程序包中包含OpenVINO2023.0版本的库文件,因此使用时无需再安装OpenVINO2023.0,直接安装NuGet包即可使用。
3 获取和转换Yolov8模型
3.1 安装ultralytics
为了更好的管理python库,此处采用conda安装ultralytics环境,使用CMD窗口输入如以下指令,进行环境创建并安装ultralytics依赖项:
conda create -n ultralytics python==3.10
conda activate ultralytics
pip install ultralytics

3.2 导出yolov8模型
Ultralytics支持直接导出预训练模型,并且可以直接导出onnx格式的模型,以Yolov8-det模型为例,直接导出yolov8s.onnx文件,在命令行中输入以下命令
yolo export model=yolov8s.pt format=onnx
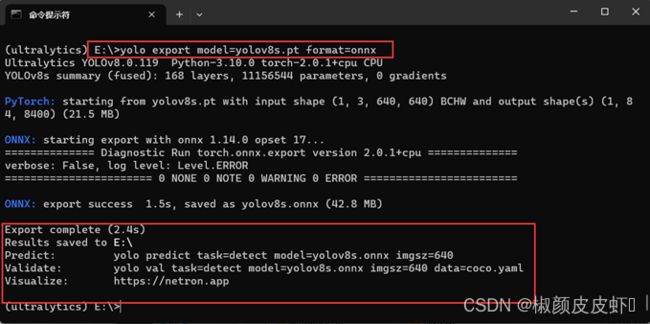
通过上述命令可以获得yolov8s.onnx模型文件,同样的方式可以将Yolov8-seg、Yolov8-pose和Yolov8-cls的模型文件。
3.3 安装OpenVINOTM Python版
OpenVINOTM提供了Python语言接口,因此是可以直接安装Python版本使用,且Python版本至此模型的转换和量化,此处采用conda安装OpenVINOTM环境,使用CMD窗口输入如以下指令,进行环境创建并安装OpenVINOTM依赖项:
conda create -n openvino2023_0 python=3.10
conda activate openvino2023_0
python -m pip install --upgrade pip
pip install openvino-dev[ONNX,pytorch,tensorflow2]==2023.0.0

上图为Yolov8-det模型在CPU:AMD R7 5800异步推理计算性能,最多可以实现21帧推理。
4 OpenVinoSharp部署Yolov8模型
为了更好的演示Yolov8模型在C#中部署,此处使用WinForm搭建了一个简单的软件进行展示,软件搭建详细代码可以参考源码,下面代码演示了OpenVinoSharp部署Yolov8模型的核心代码:
// 配置图片数据
Mat image = new Mat(image_path); // 读取本地图片
int max_image_length = image.Cols > image.Rows ? image.Cols : image.Rows;
Mat max_image = Mat.Zeros(new OpenCvSharp.Size(max_image_length, max_image_length), MatType.CV_8UC3);
Rect roi = new Rect(0, 0, image.Cols, image.Rows);
image.CopyTo(new Mat(max_image, roi));
float[] factors = new float[2]; // 图片缩放比例
factors[0] = factors[1] = (float)(max_image_length / 640.0);
// 读取模型,初始化推理核心
Core core = new Core(model_path, "CPU");
// 将图片转为二进制数据
byte[] image_data = max_image.ImEncode(".bmp");
//存储byte的长度
ulong image_size = Convert.ToUInt64(image_data.Length);
// 加载推理图片数据
core.load_input_data("images", image_data, image_size, 1);
// 模型推理
core.infer();
// 读取推理结果
float[] result_array = core.read_infer_result("output0", 8400 * 84);
// 清理内存占用
core.delet();
// 创建结果处理类
DetectionResult result_pro = new DetectionResult(classer_path, factors);
// 处理推理结果
result_image = result_pro.draw_result(result_pro.process_result(result_array), image.Clone());
4.1 Yolov8-det预测结果
用Netron软件打开yolov8s.onnx,可以看到模型的输入和输出:

模型的输入节点为images,数据类型为float32,输入为[1,3,640,640]大小的张量,代表输入为一个640×640大小的图片,图片加载模型前需要对数据进行归一化处理。
模型的输出节点为output0,数据类型为float32,输出为[1,84,8400]的张量,其中“84”的定义为:cx,cy,h,w和80种类别的分数。8400是指 YOLOv8 的3个检测头在图像尺寸为640时,有640/8=80, 640/16=40, 640/32=20, 80x80+40x40+20x20=8400个输出单元格。
下图为Yolov8-det模型的推理结果:


4.2 Yolov8-cls预测结果
用Netron软件打开yolov8s-cls.onnx,可以看到模型的输入和输出:

模型的输入节点为images,数据类型为float32,输入为[1,3,224,224]大小的张量,代表输入为一个224×224大小的图片,图片加载模型前需要对数据进行归一化处理。
模型的输出节点为output0,数据类型为float32,输出为[1,1000]的张量,其中1000代表1000个分类情况的置信值,后续直接通过最大值索引和类别标签判断结果。
下图为Yolov8-cls模型的推理结果:


4.3 Yolov8-seg预测结果
用Netron软件打开yolov8s-seg.onnx,可以看到模型的输入和输出:

模型的输入节点与Yolov8一致。模型的输出节点有两个,输出节点1为output0,数据类型为float32,输出为[1,116,8400]的张量,其中 116 的前 84 个字段跟 YOLOv8目标检测模型输出定义完全一致,后 32 个字段用于计算mask。输出节点2为output1,数据类型为float32,输出为[1,32,160,160]的张量, output0 后 32 个字段与 output1 的数据做矩阵乘法后得到的结果,即为对应目标的mask。
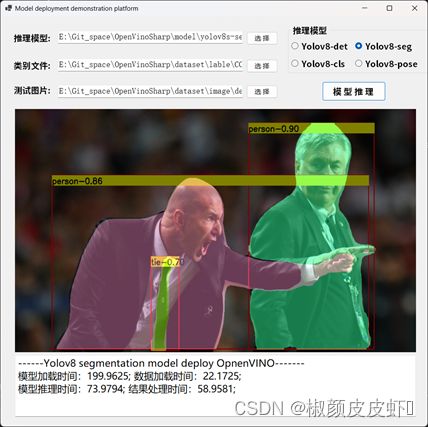
下图为Yolov8-seg模型的推理结果:

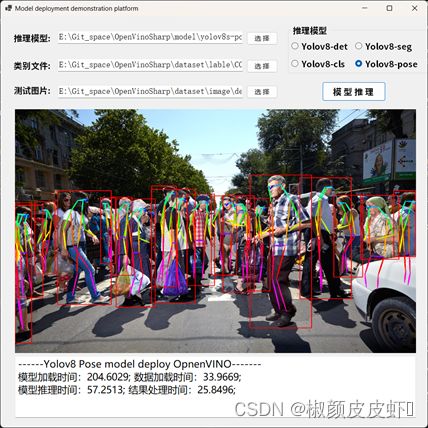
4.4 Yolov8-pose预测结果
用Netron软件打开yolov8s-pose.onnx,可以看到模型的输入和输出:
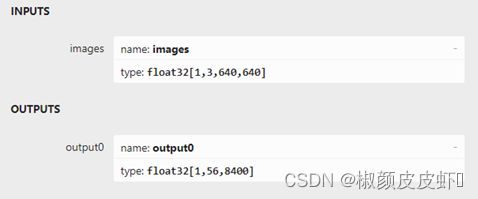
图 18 Yolov8-pose模型节点
模型的输入节点与Yolov8一致。模型的输出节点为
output0,数据类型为 float32,输出为 [1,56,8400]的张量, 56指人体的预测框 (cx,cy,w,h,score)和人体17个关键点 (x,y,score)的预测结果, 5+17×3=56。
下图为Yolov8-pose模型的推理结果: