第四讲 隐马尔可夫模型 (HMM)学习笔记
目录
- 1. 隐马尔可夫模型的基本概念
-
- 定义
- 组成
- 基本假设
- 分类
- 生成过程
- 2. 隐马尔可夫模型的三个基本问题
-
- 概率计算问题
-
- (1)直接计算法
- (2)前向算法
- (3)后向算法
- 预测问题
-
- Viterbi算法
- 学习问题
-
- (1)Viterbi学习算法
- (2)Baum-Welch学习算法
- 3. 总结
- 4. 作业代码
1. 隐马尔可夫模型的基本概念
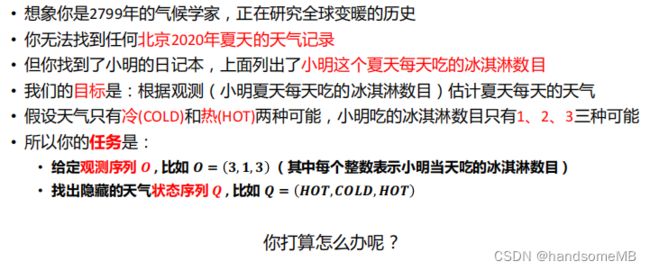
首先来看一个例子,天气和冰淇淋问题。
定义
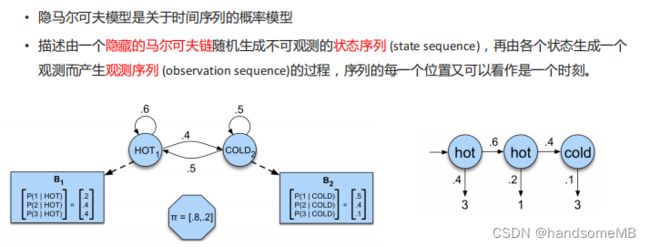
组成

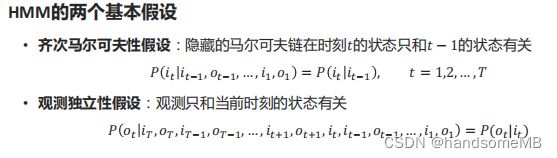
基本假设
分类

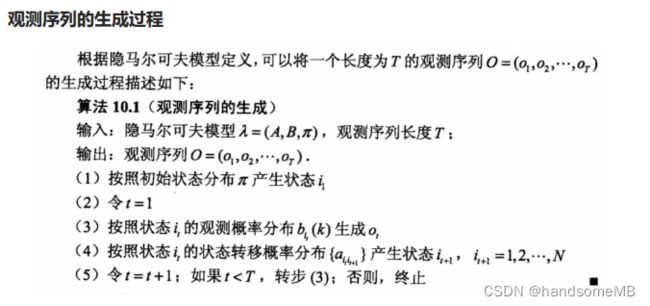
生成过程
2. 隐马尔可夫模型的三个基本问题
概率计算问题

(1)直接计算法
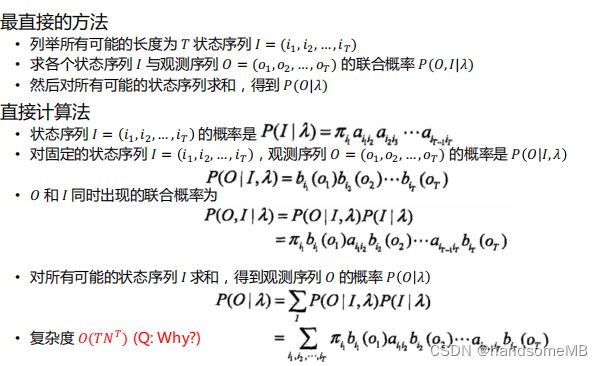
因为直接计算法的时间复杂度太高了,因此我们通常不使用这种算法。
(2)前向算法

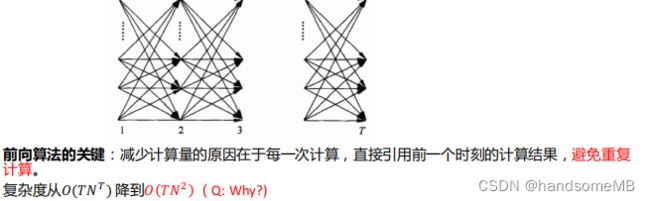
通过使用前向算法,我们便可以轻松求得观测序列的概率。但后面学习问题中的Baum-Welch学习算法涉及到后向算法的使用,因此下面我们来介绍第三种概率计算算法:后向算法。
(3)后向算法

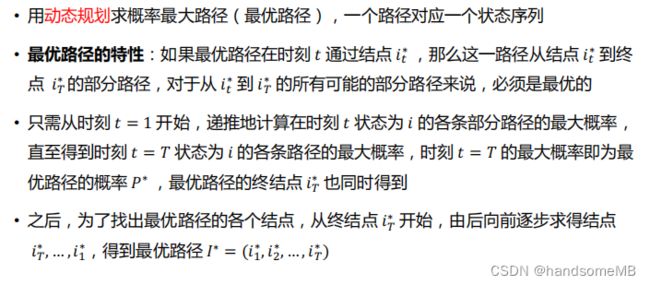
预测问题

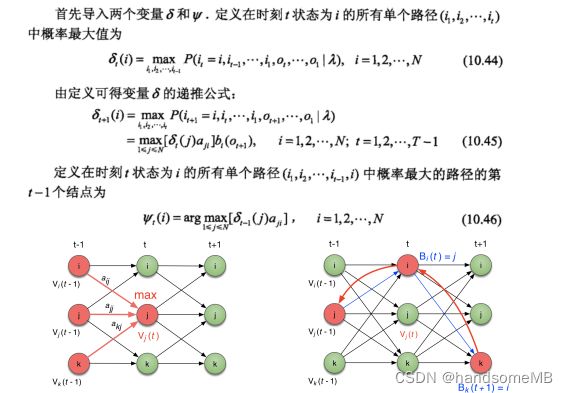
Viterbi算法

学习问题
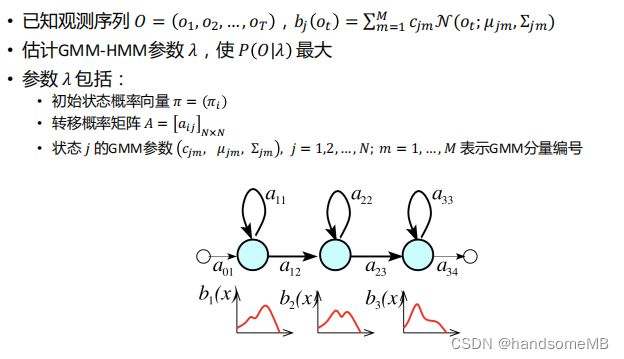
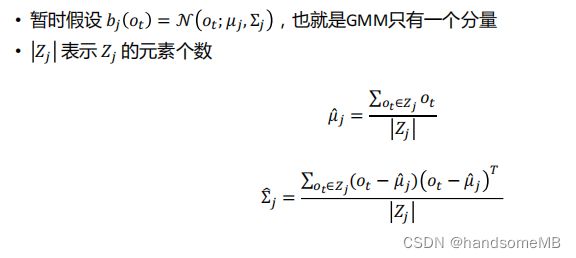
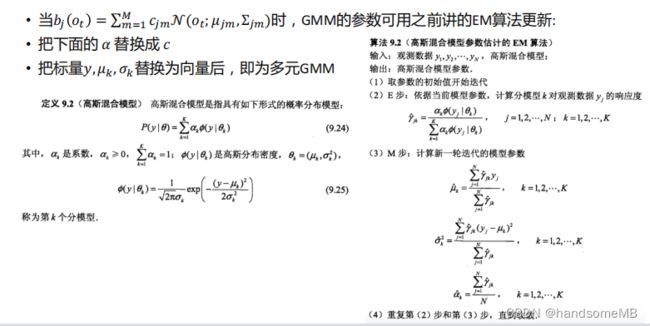
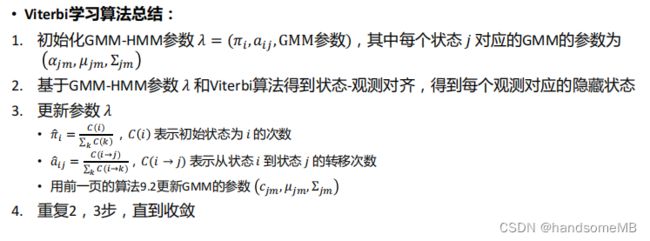
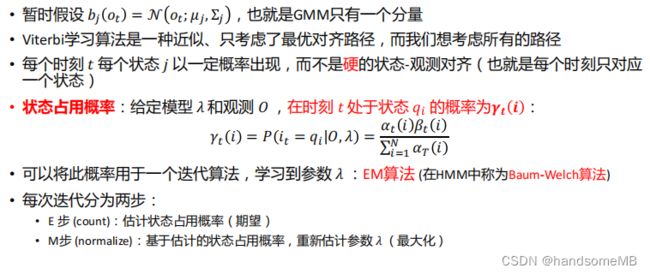
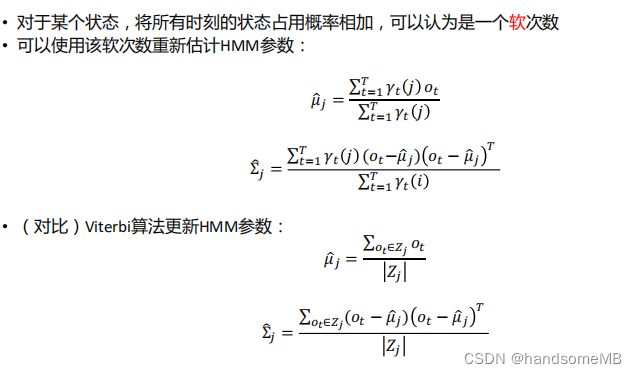
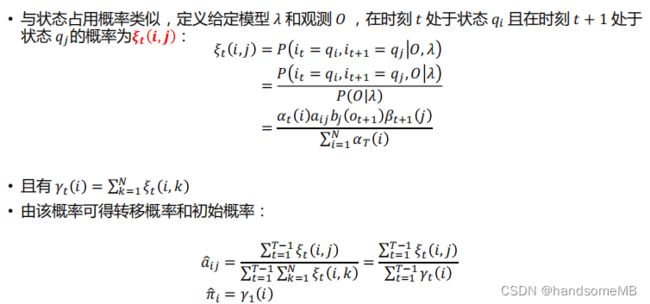
(1)Viterbi学习算法

(2)Baum-Welch学习算法

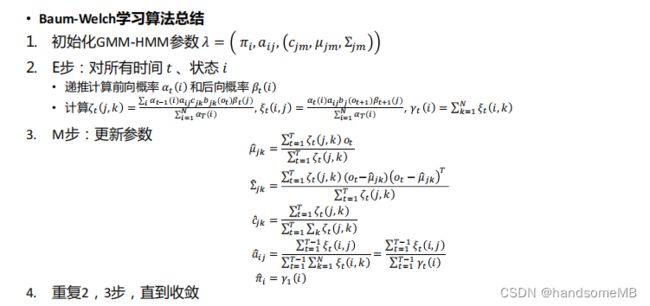
3. 总结
本节课内容重要,讲述了HMM的基本概念和三个基本问题,理论知识很多。尤其是学习算法中的Viterbi学习算法和Baum-Welch学习算法,课下需反复温习。
4. 作业代码
# Author: Kaituo Xu, Fan Yu
import numpy as np
# 前向算法
def forward_algorithm(O, HMM_model):
"""HMM Forward Algorithm.
Args:
O: (o1, o2, ..., oT), observations
HMM_model: (pi, A, B), (init state prob, transition prob, emitting prob)
Return:
prob: the probability of HMM_model generating O.
"""
pi, A, B = HMM_model
# 观测序列的长度记为T
T = len(O)
# 状态共有N种
N = len(pi)
prob = 0.0
# Begin Assignment
# Put Your Code Here
# 第一步,初始化alpha并计算其初值
alpha = np.zeros((T, N))
for i in range(N):
alpha[0][i] = pi[i] * B[i][O[0]]
# 第二步,开始递推,直到达到终止条件,复杂度为O(T*N^2)
for t in range(1, T):
for i in range(N):
temp = 0.0
for j in range(N):
temp += alpha[t - 1][j] * A[j][i]
alpha[t][i] = temp * B[i][O[t]]
# 求和
for i in range(N):
prob += alpha[T - 1][i]
# End Assignment
return prob
# 后向算法
def backward_algorithm(O, HMM_model):
"""HMM Backward Algorithm.
Args:
O: (o1, o2, ..., oT), observations
HMM_model: (pi, A, B), (init state prob, transition prob, emitting prob)
Return:
prob: the probability of HMM_model generating O.
"""
pi, A, B = HMM_model
T = len(O)
N = len(pi)
prob = 0.0
# Begin Assignment
# Put Your Code Here
# 第一步,初始化beta并计算其初值
beta = np.zeros((T, N))
for i in range(N):
beta[T - 1][i] = 1
# 第二步,开始递推,直到达到终止条件,复杂度也为O(T*N^2)
for t in range(T - 2, -1, -1):
for i in range(N):
temp = 0.0
for j in range(N):
temp += A[i][j] * B[j][O[t + 1]] * beta[t + 1][j]
beta[t][i] = temp
# 求和
for i in range(N):
prob += pi[i] * B[i][O[0]] * beta[0][i]
# End Assignment
return prob
# 维特比算法
def Viterbi_algorithm(O, HMM_model):
"""Viterbi decoding.
Args:
O: (o1, o2, ..., oT), observations
HMM_model: (pi, A, B), (init state prob, transition prob, emitting prob)
Returns:
best_prob: the probability of the best state sequence
best_path: the best state sequence
"""
pi, A, B = HMM_model
T = len(O)
N = len(pi)
best_prob, best_path = 0.0, []
# Begin Assignment
# Put Your Code Here
# 第一步初始化
A_max = np.zeros((T, N))
Path = np.zeros((T, N), dtype=np.int32)
for i in range(N):
A_max[0][i] = pi[i] * B[i][O[0]]
Path[0][i] = -1
# 第二步,开始递推,直到达到终止条件
for t in range(1, T):
for i in range(N):
temp = np.zeros(N)
for j in range(N):
temp[j] = A_max[t - 1][j] * A[j][i]
A_max[t][i] = temp.max() * B[i][O[t]]
Path[t][i] = temp.argmax()
# 对数组进行数值填充,从而可以通过索引改变值
for t in range(T):
best_path.append(-1)
# 筛选出最大的概率
best_prob = A_max[T - 1].max()
# 筛选出对应的It*
best_path[T - 1] = A_max[T - 1].argmax()
# 最优路径回溯
for t in range(T - 2, -1, -1):
best_path[t] = Path[t + 1][best_path[t + 1]]
# 最优回溯完成后,要将best_path存储的状态下标加1转换成状态。
for t in range(T):
best_path[t] += 1
# 转换为(时刻,状态)进行输出
best_path[t] = tuple((t+1, best_path[t]))
# End Assignment
return best_prob, best_path
if __name__ == "__main__":
# 状态集合= {1, 2, 3} ,观测集合= {红,白} N=3,M=2
color2id = {"RED": 0, "WHITE": 1}
# model parameters
# 初始状态概率向量
pi = [0.2, 0.4, 0.4]
# 状态转移概率矩阵(N,N)
A = [[0.5, 0.2, 0.3],
[0.3, 0.5, 0.2],
[0.2, 0.3, 0.5]]
# 观测概率矩阵 (N,M)
B = [[0.5, 0.5],
[0.4, 0.6],
[0.7, 0.3]]
# input
observations = (0, 1, 0)
HMM_model = (pi, A, B)
# process
observ_prob_forward = forward_algorithm(observations, HMM_model)
print(observ_prob_forward)
observ_prob_backward = backward_algorithm(observations, HMM_model)
print(observ_prob_backward)
best_prob, best_path = Viterbi_algorithm(observations, HMM_model)
print(best_prob, best_path)
作业链接:https://github.com/nwpuaslp/ASR_Course/tree/master/04-HMM