如何在 RT-Thread Smart 下使用 NimBLE 蓝牙协议栈
文中蓝字部分,请点击阅读原文查看。
本文主要介绍 NimBLE 软件包的在 RT-Thread Smart 下的使用
目前官方使用 ART-Pi-Smart 评估板运行 RT-Thread Smart,此工程也是跑在 ART-Pi-Smart 开发板上。
需要使用 ART-Pi-Smart 搭配 外部蓝牙 Controller 芯片使用。
需要配置好 rt-thread smart 在 Windows 下的开发环境。
准备 RT-Thread Smart 开发环境
主要按照 ART-Pi-Smart 官方用户手册进行开发环境的搭建:
1、通过ART-Pi-Smart SDK 仓库 (Gitee)下载最新的 ART-Pi Smart SDK 软件包。
2、通过用户手册中相关章节下载一下 Windows 版本的 arm-linux-musleabi 工具链,将解压出来的 arm-linux-musleabi_for_i686-w64-mingw32 文件夹整个拷贝到 ./tools/gnu_gcc/ 下面,如图:

3、装一下 env 开发工具,这个不多说。
4、加载工具链,在 ART-Pi-Smart SDK 根目录下打开 env 工具,依次运行命令:
smart-env.bat - 设置当前环境变量
set RTT - 查看环境变量信息,检查交叉编译器路径是否成功添加
arm-linux-musleabi-gcc -v - 检查交叉编译器是否生效
结果应该显示如下:
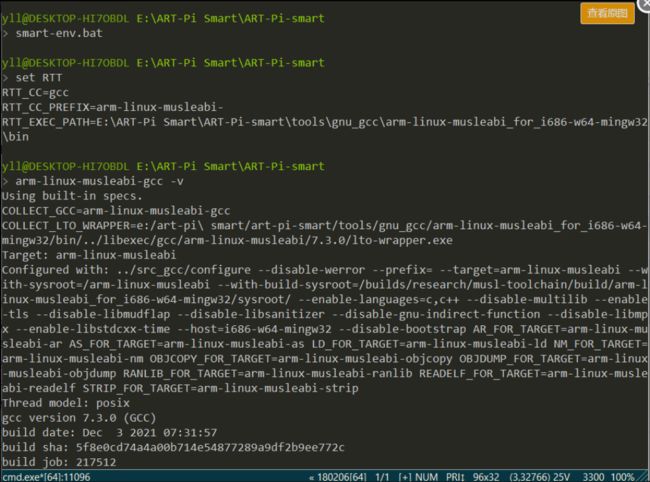
注意:每一次重新打开 env 工具都需要通过运行 ART-Pi-Smart SDK 根目录下的 smart-env.bat 来设置当前环境变量,添加交叉编译器路径,否则编译会出错。
5、依据 USB方式启动 rt-smart 内核 章节,下载 100ask_imx6ull 烧写工具(由百问网提供)。
配置相关串口
需要使用串口来连接外部的蓝牙 Controller 芯片,这里我们使用 “uart3”
1、在设置好环境的 env 工具下进入 kernel\bsp\imx6ull-artpi-smart\ 路径,这个路径下工程就是为 ART-Pi-Smart 做的 bsp 工程,也是 ART-Pi-Smart 上的rt-smart 内核工程。
2、运行 menuconfig 命令后,选择进入 Platform Driver Configuration → Select UART Driver 目录下进行 UART 设备的使能,这里使能 uart3 。

保存退出,接着下面章节配置 NimBLE。
在内核 bsp 下配置使用 NimBLE
env 工具还是进入 kernel\bsp\imx6ull-artpi-smart\ 路径。
1、运行 menuconfig 命令后,进入 RT-Thread online packages → IoT - internet of things 目录即可看到 NimBLE 软件包,勾选软件包

2、将 NimBLE 下 Controller Configuration 里的配置关闭

在 RT-Thread Smart 上 NimBLE 不需要运行 Controller ,使用 蓝牙 Controller 芯片代替。
3、HCI Transport support 下配置 HCI uart 设备为 “uart2”(这里使用设备 uart2 正是对应之前 使能的 uart3,这里序号有出入和实际系统的设备管理有关,实际板上外设接口是 uart3 但是系统内核映射为 uart2 设备了)。

4、Bluetooth Samples 选择 “BLE peripheral heartrate sensor” ;Version 选择 “latest”。最后如下图所示:
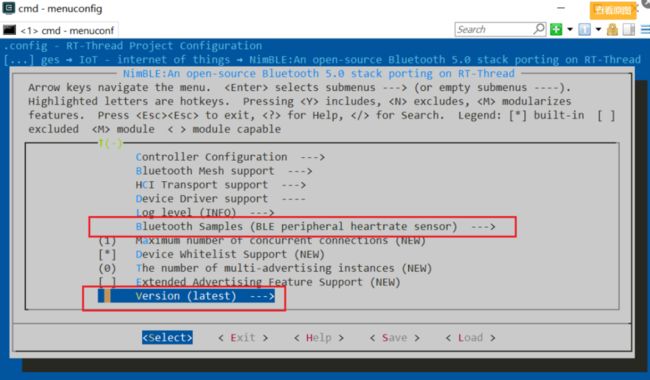
目前支持以下几个例程:
BLE peripheral heartrate sensor
BLE peripheral cycling speed and cadence sensor
BLE central role sample
BLE peripheral role sample
BLE beacon sample
BLE advertiser sample
配置完成后保存。
编译 & 连接外部蓝牙芯片
1、在前面的 menuconfig 配置完成后,使用 pkgs --update 命令更新 NimBLE 软件包
1$ pkgs --update2、运行 scons -c 清除之前的构建后,运行 scons 命令进行内核代码的编译。
3、编译成功后, kernel\bsp\imx6ull-artpi-smart\ 路径下会生成 rtthread.imx 文件。

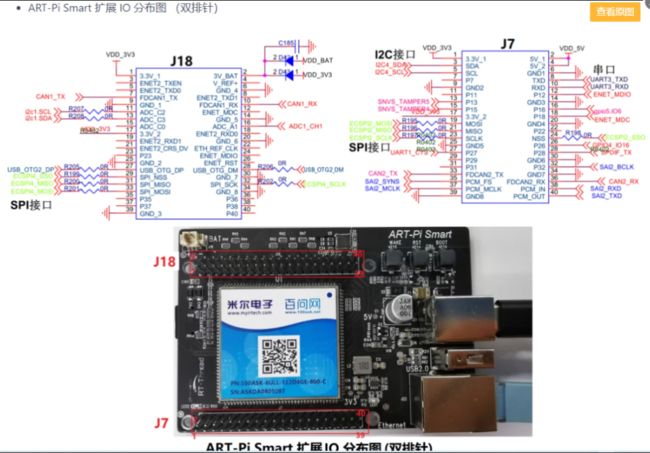
4、把外部的蓝牙 Control 芯片连接好,注意 UART 的引脚,这里使用 nrf52840dk 连接 ART-Pi-Smart 的 UART3。务必在后面内核烧写的步骤前连接好 Control 芯片。关于蓝牙控制器选择可以参考 蓝牙控制器固件 (或 NimBLE 软件包目录下 /docs/firmwares/README.md)。
烧写内核 & 运行 NimBLE
windows 下烧写内核的过程,按照文档的相关章节(USB方式启动 rt-smart 内核);连好两根线后,应该可以用终端软件打开其中一根串口线。
1、配置 ART-Pi Smart 开发板进入到 USB 固件下载模式
操作方法:开发板上电之后,先按下 “BOOT 启动按键” 不松开,然后,再按下 “RST 复位键”,即可切换到 USB 固件下载模式
2、打开之前下载好的烧录工具 100ask_imx6ull_flashing_tool.exe,显示设备已连接即可。(显示未连接则重复 1 中的操作)
3、选择“专业版”,点击第一排“固件/裸机”按钮,选择刚刚编译出来的 rtthread.imx 文件(这里要注意绝对路径里面不要包含中文和空格)。然后点击 “运行” 按钮即可,等待内核下载完毕。如下图显示:

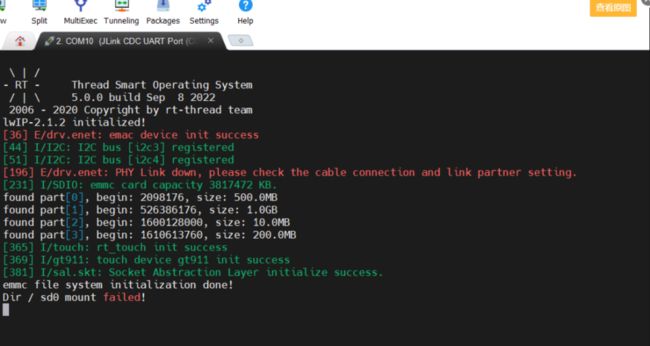
4、内核烧写完成后,不要按复位按钮,这时候观察终端,可以发现系统内核已经跑起来了(如下图)。
注意:如果按了复位按钮,bootloader 则会默认加载固化在 emmc 中的出厂内核镜像,就不是我们自己编译的了
5、在系统命令行 输入 ble_hr 命令,即可运行刚刚配置编译进内核的 NimBLE 软件包例程。

6、 使用 nRF Connect 手机 APP 即可成功观察到蓝牙设备,名称为 blehr_sensor :
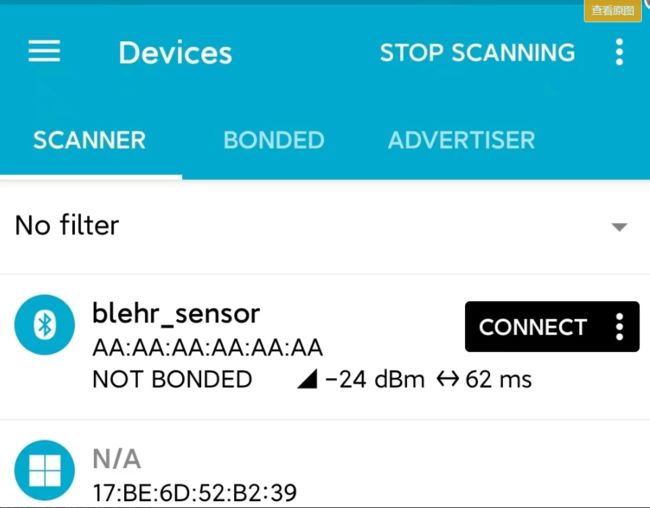
点击连接后,在 CLIENT 下即可看到 Heart Rate 相关数据。

需要注意的地方
1、之前系统中 uart 设备编号与芯片 uart 接口编号不一致的问题:
menuconfig 中的 uart 配置和实际系统中 uart 对象名是不匹配的。实际使用时,系统中的 uart 序号应该减一。即 menuconfig 中的 uart1 对应 实际系统中的 uart0, menuconfig 中的 uart2 对应 实际系统中的 uart1。
2、一定要在 USB 烧写内核步骤之前连接好外部的蓝牙 Controller 芯片,否则烧写完成后自动加载内核会出现断言错误,因为对应串口没接好。这时如果使用复位按钮来重新加载内核,又会自动加载 emmc 中固化的出厂内核,就不是我们包含 NimBLE 的内核了。
3、针对 USB 烧写内核只能加载一次的问题,应该可以使用之前的烧写工具,将重新编译的内核固化到 emmc 中,这样就不用每次都重新烧写了。
————————————————
版权声明:本文为RT-Thread论坛用户「Leno_yan」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:
https://club.rt-thread.org/ask/article/aa4957e107e49ddf.html
END

爱我就给我点在看
 点击阅读原文
点击阅读原文