62、华为昇腾开发板Atlas 200I DK A2配置mmpose的hrnet模型推理python/c++
基本思想:适配mmpose模型,记录一下流水帐,环境配置和模型来自,请查看参考链接。

链接: https://pan.baidu.com/s/1IkiwuZf1anyKX1sZkYmD1g?pwd=i51s 提取码: i51s
一、转模型
(base) root@davinci-mini:~/sxj731533730# atc --model=end2end.onnx --framework=5 --output=end2end --input_format=NCHW --input_shape="input:1,3,256,256" --log=error --soc_version=Ascend310B1
ATC start working now, please wait for a moment.
...
ATC run success, welcome to the next use.python代码
import time
import cv2
import numpy as np
from ais_bench.infer.interface import InferSession
model_path = "end2end.om"
IMG_PATH = "ca110.jpeg"
def bbox_xywh2cs(bbox, aspect_ratio, padding=1., pixel_std=200.):
"""Transform the bbox format from (x,y,w,h) into (center, scale)
Args:
bbox (ndarray): Single bbox in (x, y, w, h)
aspect_ratio (float): The expected bbox aspect ratio (w over h)
padding (float): Bbox padding factor that will be multilied to scale.
Default: 1.0
pixel_std (float): The scale normalization factor. Default: 200.0
Returns:
tuple: A tuple containing center and scale.
- np.ndarray[float32](2,): Center of the bbox (x, y).
- np.ndarray[float32](2,): Scale of the bbox w & h.
"""
x, y, w, h = bbox[:4]
center = np.array([x + w * 0.5, y + h * 0.5], dtype=np.float32)
if w > aspect_ratio * h:
h = w * 1.0 / aspect_ratio
elif w < aspect_ratio * h:
w = h * aspect_ratio
scale = np.array([w, h], dtype=np.float32) / pixel_std
scale = scale * padding
return center, scale
def rotate_point(pt, angle_rad):
"""Rotate a point by an angle.
Args:
pt (list[float]): 2 dimensional point to be rotated
angle_rad (float): rotation angle by radian
Returns:
list[float]: Rotated point.
"""
assert len(pt) == 2
sn, cs = np.sin(angle_rad), np.cos(angle_rad)
new_x = pt[0] * cs - pt[1] * sn
new_y = pt[0] * sn + pt[1] * cs
rotated_pt = [new_x, new_y]
return rotated_pt
def _get_3rd_point(a, b):
"""To calculate the affine matrix, three pairs of points are required. This
function is used to get the 3rd point, given 2D points a & b.
The 3rd point is defined by rotating vector `a - b` by 90 degrees
anticlockwise, using b as the rotation center.
Args:
a (np.ndarray): point(x,y)
b (np.ndarray): point(x,y)
Returns:
np.ndarray: The 3rd point.
"""
assert len(a) == 2
assert len(b) == 2
direction = a - b
third_pt = b + np.array([-direction[1], direction[0]], dtype=np.float32)
return third_pt
def get_affine_transform(center,
scale,
rot,
output_size,
shift=(0., 0.),
inv=False):
"""Get the affine transform matrix, given the center/scale/rot/output_size.
Args:
center (np.ndarray[2, ]): Center of the bounding box (x, y).
scale (np.ndarray[2, ]): Scale of the bounding box
wrt [width, height].
rot (float): Rotation angle (degree).
output_size (np.ndarray[2, ] | list(2,)): Size of the
destination heatmaps.
shift (0-100%): Shift translation ratio wrt the width/height.
Default (0., 0.).
inv (bool): Option to inverse the affine transform direction.
(inv=False: src->dst or inv=True: dst->src)
Returns:
np.ndarray: The transform matrix.
"""
assert len(center) == 2
assert len(scale) == 2
assert len(output_size) == 2
assert len(shift) == 2
# pixel_std is 200.
scale_tmp = scale * 200.0
shift = np.array(shift)
src_w = scale_tmp[0]
dst_w = output_size[0]
dst_h = output_size[1]
rot_rad = np.pi * rot / 180
src_dir = rotate_point([0., src_w * -0.5], rot_rad)
dst_dir = np.array([0., dst_w * -0.5])
src = np.zeros((3, 2), dtype=np.float32)
src[0, :] = center + scale_tmp * shift
src[1, :] = center + src_dir + scale_tmp * shift
src[2, :] = _get_3rd_point(src[0, :], src[1, :])
dst = np.zeros((3, 2), dtype=np.float32)
dst[0, :] = [dst_w * 0.5, dst_h * 0.5]
dst[1, :] = np.array([dst_w * 0.5, dst_h * 0.5]) + dst_dir
dst[2, :] = _get_3rd_point(dst[0, :], dst[1, :])
if inv:
trans = cv2.getAffineTransform(np.float32(dst), np.float32(src))
else:
trans = cv2.getAffineTransform(np.float32(src), np.float32(dst))
return trans
def bbox_xyxy2xywh(bbox_xyxy):
"""Transform the bbox format from x1y1x2y2 to xywh.
Args:
bbox_xyxy (np.ndarray): Bounding boxes (with scores), shaped (n, 4) or
(n, 5). (left, top, right, bottom, [score])
Returns:
np.ndarray: Bounding boxes (with scores),
shaped (n, 4) or (n, 5). (left, top, width, height, [score])
"""
bbox_xywh = bbox_xyxy.copy()
bbox_xywh[:, 2] = bbox_xywh[:, 2] - bbox_xywh[:, 0]
bbox_xywh[:, 3] = bbox_xywh[:, 3] - bbox_xywh[:, 1]
return bbox_xywh
def _get_max_preds(heatmaps):
"""Get keypoint predictions from score maps.
Note:
batch_size: N
num_keypoints: K
heatmap height: H
heatmap width: W
Args:
heatmaps (np.ndarray[N, K, H, W]): model predicted heatmaps.
Returns:
tuple: A tuple containing aggregated results.
- preds (np.ndarray[N, K, 2]): Predicted keypoint location.
- maxvals (np.ndarray[N, K, 1]): Scores (confidence) of the keypoints.
"""
assert isinstance(heatmaps,
np.ndarray), ('heatmaps should be numpy.ndarray')
assert heatmaps.ndim == 4, 'batch_images should be 4-ndim'
N, K, _, W = heatmaps.shape
heatmaps_reshaped = heatmaps.reshape((N, K, -1))
idx = np.argmax(heatmaps_reshaped, 2).reshape((N, K, 1))
maxvals = np.amax(heatmaps_reshaped, 2).reshape((N, K, 1))
preds = np.tile(idx, (1, 1, 2)).astype(np.float32)
preds[:, :, 0] = preds[:, :, 0] % W
preds[:, :, 1] = preds[:, :, 1] // W
preds = np.where(np.tile(maxvals, (1, 1, 2)) > 0.0, preds, -1)
return preds, maxvals
def transform_preds(coords, center, scale, output_size, use_udp=False):
"""Get final keypoint predictions from heatmaps and apply scaling and
translation to map them back to the image.
Note:
num_keypoints: K
Args:
coords (np.ndarray[K, ndims]):
* If ndims=2, corrds are predicted keypoint location.
* If ndims=4, corrds are composed of (x, y, scores, tags)
* If ndims=5, corrds are composed of (x, y, scores, tags,
flipped_tags)
center (np.ndarray[2, ]): Center of the bounding box (x, y).
scale (np.ndarray[2, ]): Scale of the bounding box
wrt [width, height].
output_size (np.ndarray[2, ] | list(2,)): Size of the
destination heatmaps.
use_udp (bool): Use unbiased data processing
Returns:
np.ndarray: Predicted coordinates in the images.
"""
assert coords.shape[1] in (2, 4, 5)
assert len(center) == 2
assert len(scale) == 2
assert len(output_size) == 2
# Recover the scale which is normalized by a factor of 200.
scale = scale * 200.0
if use_udp:
scale_x = scale[0] / (output_size[0] - 1.0)
scale_y = scale[1] / (output_size[1] - 1.0)
else:
scale_x = scale[0] / output_size[0]
scale_y = scale[1] / output_size[1]
target_coords = np.ones_like(coords)
target_coords[:, 0] = coords[:, 0] * scale_x + center[0] - scale[0] * 0.5
target_coords[:, 1] = coords[:, 1] * scale_y + center[1] - scale[1] * 0.5
return target_coords
def keypoints_from_heatmaps(heatmaps,
center,
scale,
unbiased=False,
post_process='default',
kernel=11,
valid_radius_factor=0.0546875,
use_udp=False,
target_type='GaussianHeatmap'):
# Avoid being affected
heatmaps = heatmaps.copy()
N, K, H, W = heatmaps.shape
preds, maxvals = _get_max_preds(heatmaps)
# add +/-0.25 shift to the predicted locations for higher acc.
for n in range(N):
for k in range(K):
heatmap = heatmaps[n][k]
px = int(preds[n][k][0])
py = int(preds[n][k][1])
if 1 < px < W - 1 and 1 < py < H - 1:
diff = np.array([
heatmap[py][px + 1] - heatmap[py][px - 1],
heatmap[py + 1][px] - heatmap[py - 1][px]
])
preds[n][k] += np.sign(diff) * .25
if post_process == 'megvii':
preds[n][k] += 0.5
# Transform back to the image
for i in range(N):
preds[i] = transform_preds(
preds[i], center[i], scale[i], [W, H], use_udp=use_udp)
if post_process == 'megvii':
maxvals = maxvals / 255.0 + 0.5
return preds, maxvals
def decode(output, center, scale, score_, batch_size=1):
c = np.zeros((batch_size, 2), dtype=np.float32)
s = np.zeros((batch_size, 2), dtype=np.float32)
score = np.ones(batch_size)
for i in range(batch_size):
c[i, :] = center
s[i, :] = scale
score[i] = np.array(score_).reshape(-1)
preds, maxvals = keypoints_from_heatmaps(
output,
c,
s,
False,
'default',
11,
0.0546875,
False,
'GaussianHeatmap'
)
all_preds = np.zeros((batch_size, preds.shape[1], 3), dtype=np.float32)
all_boxes = np.zeros((batch_size, 6), dtype=np.float32)
all_preds[:, :, 0:2] = preds[:, :, 0:2]
all_preds[:, :, 2:3] = maxvals
all_boxes[:, 0:2] = c[:, 0:2]
all_boxes[:, 2:4] = s[:, 0:2]
all_boxes[:, 4] = np.prod(s * 200.0, axis=1)
all_boxes[:, 5] = score
result = {}
result['preds'] = all_preds
result['boxes'] = all_boxes
print(result)
return result
def draw(bgr, predict_dict, skeleton,box):
cv2.rectangle(bgr, (int(box[0]), int(box[1])), (int(box[0]) + int(box[2]), int(box[1]) + int(box[3])),
(255, 0, 0))
all_preds = predict_dict["preds"]
for all_pred in all_preds:
for x, y, s in all_pred:
cv2.circle(bgr, (int(x), int(y)), 3, (0, 255, 120), -1)
for sk in skeleton:
x0 = int(all_pred[sk[0]][0])
y0 = int(all_pred[sk[0]][1])
x1 = int(all_pred[sk[1]][0])
y1 = int(all_pred[sk[1]][1])
cv2.line(bgr, (x0, y0), (x1, y1), (0, 255, 0), 1)
cv2.imwrite("sxj731533730_sxj.jpg", bgr)
if __name__ == "__main__":
# Create RKNN object
model = InferSession(0, model_path)
print("done")
bbox = [13.711652 , 26.188112, 293.61298-13.711652 , 227.78246-26.188112, 9.995332e-01]
image_size = [256, 256]
src_img = cv2.imread(IMG_PATH)
img = cv2.cvtColor(src_img, cv2.COLOR_BGR2RGB) # hwc rgb
aspect_ratio = image_size[0] / image_size[1]
img_height = img.shape[0]
img_width = img.shape[1]
padding = 1.25
pixel_std = 200
center, scale = bbox_xywh2cs(
bbox,
aspect_ratio,
padding,
pixel_std)
trans = get_affine_transform(center, scale, 0, image_size)
img = cv2.warpAffine(
img,
trans, (int(image_size[0]), int(image_size[1])),
flags=cv2.INTER_LINEAR)
print(trans)
img = img / 255.0 # 归一化到0~1
img = img.transpose(2, 0, 1)
img = np.ascontiguousarray(img, dtype=np.float32)
# Inference
print("--> Running model")
outputs = model.infer([img])[0]
print(outputs)
predict_dict = decode(outputs, center, scale, bbox[-1])
skeleton = [[0, 1],[0, 2],[1, 3],[0, 4],
[1, 4],[4, 5],[5, 7],[5,8],[5, 9],
[6, 7],[6, 10],[6, 11],[8, 12],
[9, 13],[10, 14],[11, 15],[12, 16],
[13, 17],[14, 18],[15, 19]]
draw(src_img, predict_dict, skeleton,bbox)
cmakelists.txt
cmake_minimum_required(VERSION 3.16)
project(untitled10)
set(CMAKE_CXX_FLAGS "-std=c++11")
set(CMAKE_CXX_STANDARD 11)
add_definitions(-DENABLE_DVPP_INTERFACE)
include_directories(/usr/local/samples/cplusplus/common/acllite/include)
include_directories(/usr/local/Ascend/ascend-toolkit/latest/aarch64-linux/include)
find_package(OpenCV REQUIRED)
#message(STATUS ${OpenCV_INCLUDE_DIRS})
#添加头文件
include_directories(${OpenCV_INCLUDE_DIRS})
#链接Opencv库
add_library(libascendcl SHARED IMPORTED)
set_target_properties(libascendcl PROPERTIES IMPORTED_LOCATION /usr/local/Ascend/ascend-toolkit/latest/aarch64-linux/lib64/libascendcl.so)
add_library(libacllite SHARED IMPORTED)
set_target_properties(libacllite PROPERTIES IMPORTED_LOCATION /usr/local/samples/cplusplus/common/acllite/out/aarch64/libacllite.so)
add_executable(untitled10 main.cpp)
target_link_libraries(untitled10 ${OpenCV_LIBS} libascendcl libacllite)c++代码
#include
#include "AclLiteUtils.h"
#include "AclLiteImageProc.h"
#include "AclLiteResource.h"
#include "AclLiteError.h"
#include "AclLiteModel.h"
using namespace std;
using namespace cv;
typedef enum Result {
SUCCESS = 0,
FAILED = 1
} Result;
struct Keypoints {
float x;
float y;
float score;
Keypoints() : x(0), y(0), score(0) {}
Keypoints(float x, float y, float score) : x(x), y(y), score(score) {}
};
struct Box {
float center_x;
float center_y;
float scale_x;
float scale_y;
float scale_prob;
float score;
Box() : center_x(0), center_y(0), scale_x(0), scale_y(0), scale_prob(0), score(0) {}
Box(float center_x, float center_y, float scale_x, float scale_y, float scale_prob, float score) :
center_x(center_x), center_y(center_y), scale_x(scale_x), scale_y(scale_y), scale_prob(scale_prob),
score(score) {}
};
void bbox_xywh2cs(float bbox[], float aspect_ratio, float padding, float pixel_std, float *center, float *scale) {
float x = bbox[0];
float y = bbox[1];
float w = bbox[2];
float h = bbox[3];
*center = x + w * 0.5;
*(center + 1) = y + h * 0.5;
if (w > aspect_ratio * h)
h = w * 1.0 / aspect_ratio;
else if (w < aspect_ratio * h)
w = h * aspect_ratio;
*scale = (w / pixel_std) * padding;
*(scale + 1) = (h / pixel_std) * padding;
}
void rotate_point(float *pt, float angle_rad, float *rotated_pt) {
float sn = sin(angle_rad);
float cs = cos(angle_rad);
float new_x = pt[0] * cs - pt[1] * sn;
float new_y = pt[0] * sn + pt[1] * cs;
rotated_pt[0] = new_x;
rotated_pt[1] = new_y;
}
void _get_3rd_point(cv::Point2f a, cv::Point2f b, float *direction) {
float direction_0 = a.x - b.x;
float direction_1 = a.y - b.y;
direction[0] = b.x - direction_1;
direction[1] = b.y + direction_0;
}
void get_affine_transform(float *center, float *scale, float rot, float *output_size, float *shift, bool inv,
cv::Mat &trans) {
float scale_tmp[] = {0, 0};
scale_tmp[0] = scale[0] * 200.0;
scale_tmp[1] = scale[1] * 200.0;
float src_w = scale_tmp[0];
float dst_w = output_size[0];
float dst_h = output_size[1];
float rot_rad = M_PI * rot / 180;
float pt[] = {0, 0};
pt[0] = 0;
pt[1] = src_w * (-0.5);
float src_dir[] = {0, 0};
rotate_point(pt, rot_rad, src_dir);
float dst_dir[] = {0, 0};
dst_dir[0] = 0;
dst_dir[1] = dst_w * (-0.5);
cv::Point2f src[3] = {cv::Point2f(0, 0), cv::Point2f(0, 0), cv::Point2f(0, 0)};
src[0] = cv::Point2f(center[0] + scale_tmp[0] * shift[0], center[1] + scale_tmp[1] * shift[1]);
src[1] = cv::Point2f(center[0] + src_dir[0] + scale_tmp[0] * shift[0],
center[1] + src_dir[1] + scale_tmp[1] * shift[1]);
float direction_src[] = {0, 0};
_get_3rd_point(src[0], src[1], direction_src);
src[2] = cv::Point2f(direction_src[0], direction_src[1]);
cv::Point2f dst[3] = {cv::Point2f(0, 0), cv::Point2f(0, 0), cv::Point2f(0, 0)};
dst[0] = cv::Point2f(dst_w * 0.5, dst_h * 0.5);
dst[1] = cv::Point2f(dst_w * 0.5 + dst_dir[0], dst_h * 0.5 + dst_dir[1]);
float direction_dst[] = {0, 0};
_get_3rd_point(dst[0], dst[1], direction_dst);
dst[2] = cv::Point2f(direction_dst[0], direction_dst[1]);
if (inv) {
trans = cv::getAffineTransform(dst, src);
} else {
trans = cv::getAffineTransform(src, dst);
}
}
void
transform_preds(std::vector coords, std::vector &target_coords, float *center, float *scale,
int w, int h, bool use_udp = false) {
float scale_x[] = {0, 0};
float temp_scale[] = {scale[0] * 200, scale[1] * 200};
if (use_udp) {
scale_x[0] = temp_scale[0] / (w - 1);
scale_x[1] = temp_scale[1] / (h - 1);
} else {
scale_x[0] = temp_scale[0] / w;
scale_x[1] = temp_scale[1] / h;
}
for (int i = 0; i < coords.size(); i++) {
target_coords[i].x = coords[i].x * scale_x[0] + center[0] - temp_scale[0] * 0.5;
target_coords[i].y = coords[i].y * scale_x[1] + center[1] - temp_scale[1] * 0.5;
}
}
int main() {
const char *modelPath = "../end2end.om";
bool flip_test = true;
bool heap_map = false;
float keypoint_score = 0.3f;
cv::Mat bgr = cv::imread("../ca110.jpeg");
cv::Mat rgb;
cv::cvtColor(bgr, rgb, cv::COLOR_BGR2RGB);
float image_target_w = 256;
float image_target_h = 256;
float padding = 1.25;
float pixel_std = 200;
float aspect_ratio = image_target_h / image_target_w;
float bbox[] = {13.711652, 26.188112, 293.61298, 227.78246, 9.995332e-01};// 需要检测框架 这个矩形框来自检测框架的坐标 x y w h score
bbox[2] = bbox[2] - bbox[0];
bbox[3] = bbox[3] - bbox[1];
float center[2] = {0, 0};
float scale[2] = {0, 0};
bbox_xywh2cs(bbox, aspect_ratio, padding, pixel_std, center, scale);
float rot = 0;
float shift[] = {0, 0};
bool inv = false;
float output_size[] = {image_target_h, image_target_w};
cv::Mat trans;
get_affine_transform(center, scale, rot, output_size, shift, inv, trans);
std::cout << trans << std::endl;
std::cout << center[0] << " " << center[1] << " " << scale[0] << " " << scale[1] << std::endl;
cv::Mat detect_image;//= cv::Mat::zeros(image_target_w ,image_target_h, CV_8UC3);
cv::warpAffine(rgb, detect_image, trans, cv::Size(image_target_h, image_target_w), cv::INTER_LINEAR);
//cv::imwrite("te.jpg",detect_image);
std::cout << detect_image.cols << " " << detect_image.rows << std::endl;
// inference
bool release = false;
//SampleYOLOV7 sampleYOLO(modelPath, target_width, target_height);
float *imageBytes;
AclLiteResource aclResource_;
AclLiteImageProc imageProcess_;
AclLiteModel model_;
aclrtRunMode runMode_;
ImageData resizedImage_;
const char *modelPath_;
int32_t modelWidth_;
int32_t modelHeight_;
AclLiteError ret = aclResource_.Init();
if (ret == FAILED) {
ACLLITE_LOG_ERROR("resource init failed, errorCode is %d", ret);
return FAILED;
}
ret = aclrtGetRunMode(&runMode_);
if (ret == FAILED) {
ACLLITE_LOG_ERROR("get runMode failed, errorCode is %d", ret);
return FAILED;
}
// init dvpp resource
ret = imageProcess_.Init();
if (ret == FAILED) {
ACLLITE_LOG_ERROR("imageProcess init failed, errorCode is %d", ret);
return FAILED;
}
// load model from file
ret = model_.Init(modelPath);
if (ret == FAILED) {
ACLLITE_LOG_ERROR("model init failed, errorCode is %d", ret);
return FAILED;
}
// data standardization
float meanRgb[3] = {0, 0, 0};
float stdRgb[3] = {1 / 255.0f, 1 / 255.0f, 1 / 255.0f};
// create malloc of image, which is shape with NCHW
//const float meanRgb[3] = {0.485f * 255.f, 0.456f * 255.f, 0.406f * 255.f};
//const float stdRgb[3] = {(1 / 0.229f / 255.f), (1 / 0.224f / 255.f), (1 / 0.225f / 255.f)};
int32_t channel = detect_image.channels();
int32_t resizeHeight = detect_image.rows;
int32_t resizeWeight = detect_image.cols;
imageBytes = (float *) malloc(channel * image_target_w * image_target_h * sizeof(float));
memset(imageBytes, 0, channel * image_target_h * image_target_w * sizeof(float));
// image to bytes with shape HWC to CHW, and switch channel BGR to RGB
for (int c = 0; c < channel; ++c) {
for (int h = 0; h < resizeHeight; ++h) {
for (int w = 0; w < resizeWeight; ++w) {
int dstIdx = c * resizeHeight * resizeWeight + h * resizeWeight + w;
imageBytes[dstIdx] = static_cast(
(detect_image.at(h, w)[c] -
1.0f * meanRgb[c]) * 1.0f * stdRgb[c] );
}
}
}
std::vector inferOutputs;
ret = model_.CreateInput(static_cast(imageBytes),
channel * image_target_w * image_target_h * sizeof(float));
if (ret == FAILED) {
ACLLITE_LOG_ERROR("CreateInput failed, errorCode is %d", ret);
return FAILED;
}
// inference
ret = model_.Execute(inferOutputs);
if (ret != ACL_SUCCESS) {
ACLLITE_LOG_ERROR("execute model failed, errorCode is %d", ret);
return FAILED;
}
// for()
float *data = static_cast(inferOutputs[0].data.get());
//输出维度
int shape_d =1;
int shape_c = 20;
int shape_w = 64;
int shape_h = 64;
std::vector vec_heap;
for (int i = 0; i < shape_c * shape_h * shape_w; i++) {
vec_heap.push_back(data[i]);
}
std::vector all_preds;
std::vector idx;
for (int i = 0; i < shape_c; i++) {
auto begin = vec_heap.begin() + i * shape_w * shape_h;
auto end = vec_heap.begin() + (i + 1) * shape_w * shape_h;
float maxValue = *max_element(begin, end);
int maxPosition = max_element(begin, end) - begin;
all_preds.emplace_back(Keypoints(0, 0, maxValue));
idx.emplace_back(maxPosition);
}
std::vector vec_point;
for (int i = 0; i < idx.size(); i++) {
int x = idx[i] % shape_w;
int y = idx[i] / shape_w;
vec_point.emplace_back(cv::Point2f(x, y));
}
for (int i = 0; i < shape_c; i++) {
int px = vec_point[i].x;
int py = vec_point[i].y;
if (px > 1 && px < shape_w - 1 && py > 1 && py < shape_h - 1) {
float diff_0 = vec_heap[py * shape_w + px + 1] - vec_heap[py * shape_w + px - 1];
float diff_1 = vec_heap[(py + 1) * shape_w + px] - vec_heap[(py - 1) * shape_w + px];
vec_point[i].x += diff_0 == 0 ? 0 : (diff_0 > 0) ? 0.25 : -0.25;
vec_point[i].y += diff_1 == 0 ? 0 : (diff_1 > 0) ? 0.25 : -0.25;
}
}
std::vector all_boxes;
if (heap_map) {
all_boxes.emplace_back(Box(center[0], center[1], scale[0], scale[1], scale[0] * scale[1] * 400, bbox[4]));
}
transform_preds(vec_point, all_preds, center, scale, shape_w, shape_h);
//0 L_Eye 1 R_Eye 2 L_EarBase 3 R_EarBase 4 Nose 5 Throat 6 TailBase 7 Withers 8 L_F_Elbow 9 R_F_Elbow 10 L_B_Elbow 11 R_B_Elbow
// 12 L_F_Knee 13 R_F_Knee 14 L_B_Knee 15 R_B_Knee 16 L_F_Paw 17 R_F_Paw 18 L_B_Paw 19 R_B_Paw
int skeleton[][2] = {{0, 1},
{0, 2},
{1, 3},
{0, 4},
{1, 4},
{4, 5},
{5, 7},
{5, 8},
{5, 9},
{6, 7},
{6, 10},
{6, 11},
{8, 12},
{9, 13},
{10, 14},
{11, 15},
{12, 16},
{13, 17},
{14, 18},
{15, 19}};
cv::rectangle(bgr, cv::Point(bbox[0], bbox[1]), cv::Point(bbox[0] + bbox[2], bbox[1] + bbox[3]),
cv::Scalar(255, 0, 0));
for (int i = 0; i < all_preds.size(); i++) {
if (all_preds[i].score > keypoint_score) {
cv::circle(bgr, cv::Point(all_preds[i].x, all_preds[i].y), 3, cv::Scalar(0, 255, 120), -1);//画点,其实就是实心圆
}
}
for (int i = 0; i < sizeof(skeleton) / sizeof(sizeof(skeleton[1])); i++) {
int x0 = all_preds[skeleton[i][0]].x;
int y0 = all_preds[skeleton[i][0]].y;
int x1 = all_preds[skeleton[i][1]].x;
int y1 = all_preds[skeleton[i][1]].y;
cv::line(bgr, cv::Point(x0, y0), cv::Point(x1, y1),
cv::Scalar(0, 255, 0), 1);
}
cv::imwrite("../image.jpg", bgr);
model_.DestroyResource();
imageProcess_.DestroyResource();
aclResource_.Release();
return SUCCESS;
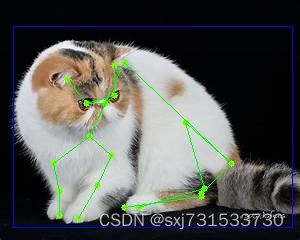
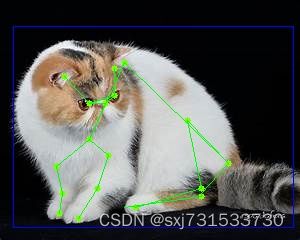
} 测试结果
/root/sxj731533730/cmake-build-debug/untitled10
[0.7316863791031282, -0, 15.56737128098375;
-4.62405306581973e-17, 0.7316863791031282, 35.08659815701316]
153.662 126.985 1.74938 1.74938
256 256
[INFO] Acl init ok
[INFO] Open device 0 ok
[INFO] Use default context currently
[INFO] dvpp init resource ok
[INFO] Load model ../end2end.om success
[INFO] Create model description success
[INFO] Create model(../end2end.om) output success
[INFO] Init model ../end2end.om success
[INFO] Unload model ../end2end.om success
[INFO] destroy context ok
[INFO] Reset device 0 ok
[INFO] Finalize acl ok
Process finished with exit code 0
参考自己的博客
48、mmpose中hrnet关键点识别模型转ncnn和mnn,并进行训练和部署_hrnet ncnn_sxj731533730的博客-CSDN博客
61、华为昇腾开发板Atlas 200I DK A2初步测试,yolov7_batchsize_1&yolov7_batchsize_3的python/c++推理测试_sxj731533730的博客-CSDN博客