强化学习 PPO算法和代码
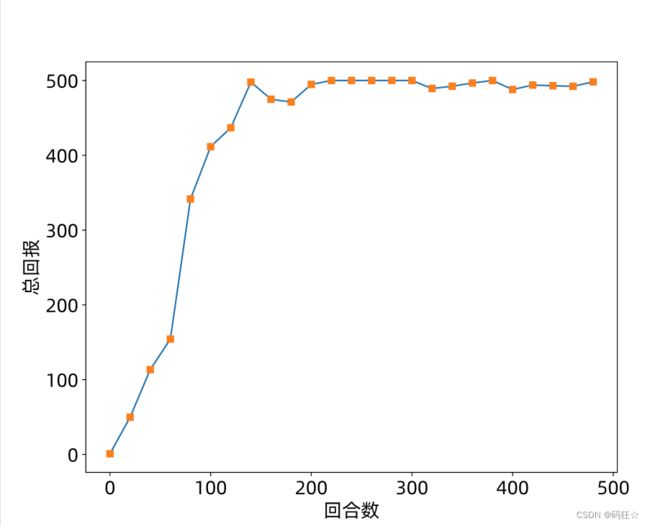
PPO 效果
前提
τ ~ p(τ) 是轨迹分布
t∈[0,T-1] 是一条轨迹的步骤数
策略 π 是动作 a 的概率分布
State-Action Value Function 简称 V(st) 函数
V π ( s t ) = E τ ∼ p ( τ ) [ R ( τ t : T ) ∣ τ s t = s t ] V^{\pi} (s_{t}) = E_{\tau \sim p(\tau )} [R(\tau_{t:T}) | \tau_{s_{t}}=s_{t}] Vπ(st)=Eτ∼p(τ)[R(τt:T)∣τst=st]
V π ( s t ) = E τ ∼ p ( τ ) [ r ( s t ) + γ r t + 1 + γ 2 r t + 2 + . . . ] V^{\pi} (s_{t}) = E_{\tau \sim p(\tau )} [ r(s_{t}) + \gamma r_{t+1} + \gamma^2 r_{t+2}+... ] Vπ(st)=Eτ∼p(τ)[r(st)+γrt+1+γ2rt+2+...]
V(st)函数的贝尔曼方程:
V π ( s t ) = E τ ∼ p ( τ ) [ r ( s t ) + γ V π ( s t + 1 ) ] V^{\pi} (s_{t}) = E_{\tau \sim p(\tau )} [r(s_{t}) + \gamma V^{\pi} (s_{t+1}) ] Vπ(st)=Eτ∼p(τ)[r(st)+γVπ(st+1)]
State-Action Value Function 简称 Q(st,at) 函数
它定义为环境在状态st智能体在策略π控制执行动作at的条件下, 能获得的期望回报值:
Q π ( s t , a t ) = E τ ∼ p ( τ ) [ R ( τ t : T ) ∣ τ a t = a t , τ s t = s t ] Q^{\pi } (s_{t} ,a_{t}) = E_{\tau \sim p(\tau)} [ R(\tau_{t:T}) | \tau_{a_{t}}=a_{t} , \tau_{s_{t}}=s_{t} ] Qπ(st,at)=Eτ∼p(τ)[R(τt:T)∣τat=at,τst=st]
Q π ( s t , a t ) = E τ ∼ p ( τ ) [ r ( s t , a t ) + γ r t + 1 + γ 2 r t + 2 + . . . ] Q^{\pi } (s_{t} ,a_{t}) = E_{\tau \sim p(\tau)} [ r(s_{t},a_{t}) + \gamma r_{t+1} + \gamma^2 r_{t+2}+... ] Qπ(st,at)=Eτ∼p(τ)[r(st,at)+γrt+1+γ2rt+2+...]
Q π ( s t , a t ) = E τ ∼ p ( τ ) [ r ( s t , a t ) + γ V π ( s t + 1 ) ] Q^{\pi } (s_{t} ,a_{t}) = E_{\tau \sim p(\tau)} [ r(s_{t},a_{t}) + \gamma V^{\pi} (s_{t+1}) ] Qπ(st,at)=Eτ∼p(τ)[r(st,at)+γVπ(st+1)]
这里有两个随机变量 st 和 at ,其中由于, 已确定, (, )也是确定值
Q 函数与 V 函数直接存在如下关系,:
V π ( s t ) = E a t ∼ π ( a t ∣ s t ) [ Q π ( s t , a t ) ] V^{\pi} (s_{t}) = E_{a_{t} \sim \pi (a_{t}|s_{t})} [ Q^{\pi} (s_{t},a_{t}) ] Vπ(st)=Eat∼π(at∣st)[Qπ(st,at)]
当采样自(|)策略时, Q(st,at) 对动作 a 求期望 与 V(st)相等
说明 V(st) 是策略(|)下执行动作 at 的平均回报
我们把(, )与()的差定义为优势值函数:
A π ( s , a ) △ = Q π ( s , a ) − V π ( s ) A^{\pi} (s,a) \underset{=}{\bigtriangleup } Q^{\pi} (s,a) - V^{\pi} (s) Aπ(s,a)=△Qπ(s,a)−Vπ(s)
它表明在状态下采取动作比平均水平的优势程度: (, ) > 0时说明采取动作要优于平均水平;反之则劣于平均水平
字体找不到
ubuntu python findfont: Font family ‘Alibaba PuHuiTi 3.0’ not found.
shell 清除缓存:
rm ~/.cache/matplotlib -rf
到这里下载 阿里巴巴普惠体3.0 https://fonts.alibabagroup.com/
然后安装字体
PPO
其中 gym version = 0.26.2 https://github.com/openai/gym/releases/tag/0.26.2
import matplotlib
from matplotlib import pyplot as plt
matplotlib.rcParams['font.size'] = 18
matplotlib.rcParams['figure.titlesize'] = 18
matplotlib.rcParams['figure.figsize'] = [9, 7]
matplotlib.rcParams['font.family'] = ['Alibaba PuHuiTi 3.0']
matplotlib.rcParams['axes.unicode_minus']=False
plt.figure()
import gym,os
import numpy as np
import tensorflow as tf
from tensorflow import keras
from tensorflow.keras import layers,optimizers,losses
from collections import namedtuple
# from torch.utils.data import SubsetRandomSampler,BatchSampler
SEED_NUM = 2222
env = gym.make('CartPole-v0') # 创建游戏环境
#env.seed(SEED_NUM )
tf.random.set_seed(SEED_NUM )
np.random.seed(SEED_NUM )
os.environ['TF_CPP_MIN_LOG_LEVEL'] = '2'
assert tf.__version__.startswith('2.')
gamma = 0.98 # 激励衰减因子
epsilon = 0.2 # PPO误差超参数0.8~1.2
batch_size = 32 # batch size
# 创建游戏环境
env = gym.make('CartPole-v1').unwrapped
Transition = namedtuple('Transition', ['state', 'action', 'a_log_prob', 'reward', 'next_state'])
class Actor(keras.Model):
""" 策略网络 """
def __init__(self):
super(Actor, self).__init__()
# 策略网络,也叫Actor网络,输出为概率分布pi(a|s)
self.fc1 = layers.Dense(100, kernel_initializer='he_normal')
self.fc2 = layers.Dense(2, kernel_initializer='he_normal')
def call(self, inputs):
x = tf.nn.relu(self.fc1(inputs))
x = self.fc2(x)
x = tf.nn.softmax(x, axis=1) # 转换成概率
return x
class Critic(keras.Model):
""" 奖励预测网络 """
def __init__(self):
super(Critic, self).__init__()
# 偏置b的估值网络,也叫Critic网络,输出为v(s)
self.fc1 = layers.Dense(100, kernel_initializer='he_normal')
self.fc2 = layers.Dense(1, kernel_initializer='he_normal')
def call(self, inputs):
x = tf.nn.relu(self.fc1(inputs))
x = self.fc2(x)
return x
class PPO():
# PPO算法主体
def __init__(self):
super(PPO, self).__init__()
self.actor = Actor() # 创建Actor网络
self.critic = Critic() # 创建Critic网络
self.buffer = [] # 数据缓冲池
self.actor_optimizer = optimizers.Adam(1e-3) # Actor优化器
self.critic_optimizer = optimizers.Adam(3e-3) # Critic优化器
def select_action(self, s):
# 送入状态向量,获取策略: [4]
s = tf.constant(s, dtype=tf.float32)
# s: [4] => [1,4]
s = tf.expand_dims(s, axis=0)
# 获取策略分布: [1, 2]
prob = self.actor(s)
# 从类别分布中采样1个动作, shape: [1]
a = tf.random.categorical(tf.math.log(prob), 1)[0]
a = int(a) # Tensor转数字
return a, float(prob[0][a]) # 返回动作及其概率
def get_value(self, s):
# 送入状态向量,获取策略: [4]
s = tf.constant(s, dtype=tf.float32)
# s: [4] => [1,4]
s = tf.expand_dims(s, axis=0)
# 获取策略分布: [1, 2]
v = self.critic(s)[0]
return float(v) # 返回v(s)
def store_transition(self, transition):
# 存储采样数据
self.buffer.append(transition)
def optimize(self):
# 优化网络主函数
# 从缓存中取出样本数据,转换成Tensor
state = tf.constant([t.state for t in self.buffer], dtype=tf.float32)
action = tf.constant([t.action for t in self.buffer], dtype=tf.int32)
action = tf.reshape(action,[-1,1])
reward = [t.reward for t in self.buffer]
old_action_log_prob = tf.constant([t.a_log_prob for t in self.buffer], dtype=tf.float32)
old_action_log_prob = tf.reshape(old_action_log_prob, [-1,1])
# 通过MC方法循环计算R(st)
R = 0
Rs = []
for r in reward[::-1]: #逆序计算每一时刻t步骤的回报
R = r + gamma * R
Rs.insert(0, R)
Rs = tf.constant(Rs, dtype=tf.float32)
# 对缓冲池数据大致迭代10遍
for _ in range(round(10*len(self.buffer)/batch_size)):
# 随机从缓冲池采样batch_size大小样本
index = np.random.choice(np.arange(len(self.buffer)), batch_size, replace=False)
# 构建梯度跟踪环境
with tf.GradientTape() as tape1, tf.GradientTape() as tape2:
# 取出R(st)采样真实值,[b,1] ,shape=(batch_size,1)
v_target = tf.expand_dims(tf.gather(Rs, index, axis=0), axis=1)
# 计算v(s)预测值,也就是偏置b,我们后面会介绍为什么写成v,shape=(batch_size,1)
v = self.critic(tf.gather(state, index, axis=0))
delta = v_target - v # 计算优势值,采样真实值与预测值的误差,shape=(batch_size,1)
advantage = tf.stop_gradient(delta) # 断开梯度连接 ,shape=(batch_size,1)
# 由于TF的gather_nd与pytorch的gather功能不一样,需要构造
# gather_nd需要的坐标参数,indices:[b, 2]
# pi_a = pi.gather(1, a) # pytorch只需要一行即可实现
a = tf.gather(action, index, axis=0) # 取出batch的动作at , shape=(batch_size,1)
pi = self.actor(tf.gather(state, index, axis=0)) # batch的状态st预测动作a分布pi(a|st) shape=(batch_size,2)
indices = tf.expand_dims(tf.range(a.shape[0]), axis=1) #shape=(batch_size,1)
indices = tf.concat([indices, a], axis=1) #shape=(batch_size,2),第1列是索引indices,第2列是a,a∈[0,1]也相当于索引
pi_a = tf.gather_nd(pi, indices) # pi预测中按照indices索引取出动作的概率值pi(at|st), shape=(batch_size,)
pi_a = tf.expand_dims(pi_a, axis=1) # shape=(batch_size,1)
# 重要性采样 = 预测概率/采样真实概率
ratio = (pi_a / tf.gather(old_action_log_prob, index, axis=0)) # shape=(batch_size,1)
surr1 = ratio * advantage # shape=(batch_size,1)
surr2 = tf.clip_by_value(ratio, 1 - epsilon, 1 + epsilon) * advantage # shape=(batch_size,1)
# PPO误差函数
policy_loss = -tf.reduce_mean(tf.minimum(surr1, surr2)) # shape=()
# 对于偏置v来说,希望与MC估计的R(st)越接近越好
value_loss = losses.MSE(v_target, v) # shape=(batch_size,)
# 优化策略网络
grads = tape1.gradient(policy_loss, self.actor.trainable_variables)
self.actor_optimizer.apply_gradients(zip(grads, self.actor.trainable_variables))
# 优化偏置值网络
grads = tape2.gradient(value_loss, self.critic.trainable_variables)
self.critic_optimizer.apply_gradients(zip(grads, self.critic.trainable_variables))
self.buffer = [] # 清空已训练数据
def main():
agent = PPO()
returns = [] # 统计总回报
total = 0 # 一段时间内平均回报
for i_epoch in range(500): # 训练回合数
state,info = env.reset(seed=SEED_NUM) # 复位环境
for t in range(500): # 最多考虑500步
# 通过最新策略与环境交互
action, action_prob = agent.select_action(state)
#next_state, reward, done, _ , _= env.step(action)
next_state, reward, done, truncated, info = env.step(action)
# 构建样本并存储
trans = Transition(state, action, action_prob, reward, next_state)
agent.store_transition(trans)
state = next_state # 刷新状态
total += reward # 累积激励
if done: # 合适的时间点训练网络
if len(agent.buffer) >= batch_size:
agent.optimize() # 训练网络
break
if i_epoch % 20 == 0: # 每20个回合统计一次平均回报
returns.append(total/20)
total = 0
print(i_epoch, returns[-1])
print(np.array(returns))
plt.figure()
plt.plot(np.arange(len(returns))*20, np.array(returns))
plt.plot(np.arange(len(returns))*20, np.array(returns), 's')
plt.xlabel('回合数')
plt.ylabel('总回报')
plt.savefig('ppo-tf-cartpole.svg')
if __name__ == '__main__':
main()
print("end")