【ConcurrentHashMap1.7源码】十分钟带你深入ConcurrentHashMap并发解析
ConcurrentHashMap1.7源码
四个核心要点
- 初始化
- PUT
- 扩容
- GET
Unsafe

初始化
五个构造方法
/**
* Creates a new, empty map with the default initial table size (16).
*/
public ConcurrentHashMap() {
}
/**
* Creates a new, empty map with an initial table size
* accommodating the specified number of elements without the need
* to dynamically resize.
*
* @param initialCapacity The implementation performs internal
* sizing to accommodate this many elements.
* @throws IllegalArgumentException if the initial capacity of
* elements is negative
*/
public ConcurrentHashMap(int initialCapacity) {
if (initialCapacity < 0)
throw new IllegalArgumentException();
int cap = ((initialCapacity >= (MAXIMUM_CAPACITY >>> 1)) ?
MAXIMUM_CAPACITY :
tableSizeFor(initialCapacity + (initialCapacity >>> 1) + 1));
this.sizeCtl = cap;
}
/**
* Creates a new map with the same mappings as the given map.
*
* @param m the map
*/
public ConcurrentHashMap(Map<? extends K, ? extends V> m) {
this.sizeCtl = DEFAULT_CAPACITY;
putAll(m);
}
/**
* Creates a new, empty map with an initial table size based on
* the given number of elements ({@code initialCapacity}) and
* initial table density ({@code loadFactor}).
*
* @param initialCapacity the initial capacity. The implementation
* performs internal sizing to accommodate this many elements,
* given the specified load factor.
* @param loadFactor the load factor (table density) for
* establishing the initial table size
* @throws IllegalArgumentException if the initial capacity of
* elements is negative or the load factor is nonpositive
*
* @since 1.6
*/
public ConcurrentHashMap(int initialCapacity, float loadFactor) {
this(initialCapacity, loadFactor, 1);
}
/**
* Creates a new, empty map with an initial table size based on
* the given number of elements ({@code initialCapacity}), table
* density ({@code loadFactor}), and number of concurrently
* updating threads ({@code concurrencyLevel}).
*
* @param initialCapacity the initial capacity. The implementation
* performs internal sizing to accommodate this many elements,
* given the specified load factor.
* @param loadFactor the load factor (table density) for
* establishing the initial table size
* @param concurrencyLevel the estimated number of concurrently
* updating threads. The implementation may use this value as
* a sizing hint.
* @throws IllegalArgumentException if the initial capacity is
* negative or the load factor or concurrencyLevel are
* nonpositive
*/
public ConcurrentHashMap(int initialCapacity,
float loadFactor, int concurrencyLevel) {
if (!(loadFactor > 0.0f) || initialCapacity < 0 || concurrencyLevel <= 0)
throw new IllegalArgumentException();
if (initialCapacity < concurrencyLevel) // Use at least as many bins
initialCapacity = concurrencyLevel; // as estimated threads
long size = (long)(1.0 + (long)initialCapacity / loadFactor);
int cap = (size >= (long)MAXIMUM_CAPACITY) ?
MAXIMUM_CAPACITY : tableSizeFor((int)size);
this.sizeCtl = cap;
}
无参构造方法
/**
* Creates a new, empty map with a default initial capacity (16),
* load factor (0.75) and concurrencyLevel (16).
*/
public ConcurrentHashMap() {
this(DEFAULT_INITIAL_CAPACITY, DEFAULT_LOAD_FACTOR, DEFAULT_CONCURRENCY_LEVEL);
}
四个参数
- initialCapacity-初始容量
static final int DEFAULT_INITIAL_CAPACITY = 16;
- loadFactor-加载因子
static final float DEFAULT_LOAD_FACTOR = 0.75f;
- concurrencyLevel-并发等级(最大支持线程)
static final int DEFAULT_CONCURRENCY_LEVEL = 16;
@SuppressWarnings("unchecked")
public ConcurrentHashMap(int initialCapacity,
float loadFactor, int concurrencyLevel) {
// 参数校验
if (!(loadFactor > 0) || initialCapacity < 0 || concurrencyLevel <= 0)
throw new IllegalArgumentException();
if (concurrencyLevel > MAX_SEGMENTS)
concurrencyLevel = MAX_SEGMENTS;
// Find power-of-two sizes best matching arguments
int sshift = 0;
// 关键
int ssize = 1;
// 1 < 16 2 < 16 4 < 16 8 < 16 最后ssize=16
// 假如传入concurrencyLevel = 9 ,ssize = 16
// 也就是找一个大于concurrencyLevel的2次幂数给ssize
while (ssize < concurrencyLevel) {
++sshift;
ssize <<= 1;
}
this.segmentShift = 32 - sshift;
this.segmentMask = ssize - 1;
if (initialCapacity > MAXIMUM_CAPACITY)
initialCapacity = MAXIMUM_CAPACITY;
// 以默认值为例c=16/16=1
int c = initialCapacity / ssize;
// 如果是initialCapacity=9,concurrencyLevel=8
// 下面是向上取整,要确保要这么多容量
if (c * ssize < initialCapacity)
++c;
// static final int MIN_SEGMENT_TABLE_CAPACITY = 2;
// cap = 2,所以初始化的时候cap=2
int cap = MIN_SEGMENT_TABLE_CAPACITY;
// 保证cap容量是2的幂次方数
while (cap < c)
cap <<= 1;
// create segments and segments[0]
Segment<K, V> s0 =
new Segment<K, V>(loadFactor, (int) (cap * loadFactor),
(HashEntry<K, V>[]) new HashEntry[cap]);
Segment<K, V>[] ss = (Segment<K, V>[]) new Segment[ssize];
// 默认先在Segment数组里放了一个segments[0],里面是一个new HashEntry[cap]
// 后面会以这个默认进行扩容
UNSAFE.putOrderedObject(ss, SBASE, s0); // ordered write of segments[0]
this.segments = ss;
}
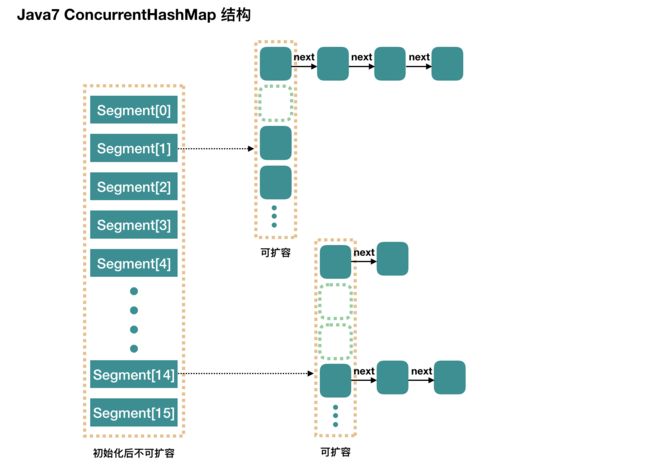
注意:默认初始化的时候,HashEntry数组默认是16x2=32个,而不是16个
Segment
继承了ReentrantLock,方便lock
static final class Segment<K, V> extends ReentrantLock implements Serializable {
private static final long serialVersionUID = 2249069246763182397L;
/**
* The maximum number of times to tryLock in a prescan before
* possibly blocking on acquire in preparation for a locked
* segment operation. On multiprocessors, using a bounded
* number of retries maintains cache acquired while locating
* nodes.
*/
static final int MAX_SCAN_RETRIES =
Runtime.getRuntime().availableProcessors() > 1 ? 64 : 1;
/**
* The per-segment table. Elements are accessed via
* entryAt/setEntryAt providing volatile semantics.
*/
transient volatile HashEntry<K, V>[] table;
/**
* The number of elements. Accessed only either within locks
* or among other volatile reads that maintain visibility.
*/
transient int count;
/**
* The total number of mutative operations in this segment.
* Even though this may overflows 32 bits, it provides
* sufficient accuracy for stability checks in CHM isEmpty()
* and size() methods. Accessed only either within locks or
* among other volatile reads that maintain visibility.
*/
transient int modCount;
/**
* The table is rehashed when its size exceeds this threshold.
* (The value of this field is always (int)(capacity *
* loadFactor).)
*/
transient int threshold;
/**
* The load factor for the hash table. Even though this value
* is same for all segments, it is replicated to avoid needing
* links to outer object.
*
* @serial
*/
final float loadFactor;
Segment(float lf, int threshold, HashEntry<K, V>[] tab) {
this.loadFactor = lf;
this.threshold = threshold;
this.table = tab;
}
PUT方法
@SuppressWarnings("unchecked")
public V put(K key, V value) {
Segment<K, V> s;
if (value == null)
throw new NullPointerException();
// 计算hash值
int hash = hash(key);
// segmentMask = ssize - 1
// 下面算segment的下标
int j = (hash >>> segmentShift) & segmentMask;
// 判断segment是不是null
if ((s = (Segment<K, V>) UNSAFE.getObject // nonvolatile; recheck
(segments, (j << SSHIFT) + SBASE)) == null) // in ensureSegment
s = ensureSegment(j);
// segment不为空直接put
return s.put(key, hash, value, false);
}
创建segment
只需要一个线程来创建segment,另一个线程也是得到同一个Segment
/**
* Returns the segment for the given index, creating it and
* recording in segment table (via CAS) if not already present.
*
* @param k the index
* @return the segment
*/
@SuppressWarnings("unchecked")
private Segment<K, V> ensureSegment(int k) {
final Segment<K, V>[] ss = this.segments;
long u = (k << SSHIFT) + SBASE; // raw offset
Segment<K, V> seg;
// 只有一个线程拿到ss是null,一个线程进入if
if ((seg = (Segment<K, V>) UNSAFE.getObjectVolatile(ss, u)) == null) {
// 原型模式
Segment<K, V> proto = ss[0]; // use segment 0 as prototype
int cap = proto.table.length;
float lf = proto.loadFactor;
// 0.75x16 = 12
int threshold = (int) (cap * lf);
HashEntry<K, V>[] tab = (HashEntry<K, V>[]) new HashEntry[cap];
// DCL
if ((seg = (Segment<K, V>) UNSAFE.getObjectVolatile(ss, u))
== null) { // recheck
// 创建Segment对象
Segment<K, V> s = new Segment<K, V>(lf, threshold, tab);
while ((seg = (Segment<K, V>) UNSAFE.getObjectVolatile(ss, u))
== null) {
// 把新segment放入数组
if (UNSAFE.compareAndSwapObject(ss, u, null, seg = s))
break;
}
}
}
return seg;
}
PUT
final V put(K key, int hash, V value, boolean onlyIfAbsent) {
// 两个线程进来,tryLock(),拿到锁就可以走下面流程放入元素,没有的话就可以走scanAndLockForPut流程
// 在等待锁的过程中可以执行相关代码,也就是自旋
// lock是阻塞,trylock是非阻塞
HashEntry<K, V> node = tryLock() ? null :
scanAndLockForPut(key, hash, value);
V oldValue;
try {
HashEntry<K, V>[] tab = table;
// 计算HashEntry tab的下标
int index = (tab.length - 1) & hash;
HashEntry<K, V> first = entryAt(tab, index);
// 以下就是hashmap的代码
for (HashEntry<K, V> e = first; ; ) {
if (e != null) {
K k;
if ((k = e.key) == key ||
(e.hash == hash && key.equals(k))) {
oldValue = e.value;
if (!onlyIfAbsent) {
e.value = value;
++modCount;
}
break;
}
e = e.next;
} else {
if (node != null)
node.setNext(first);
else
node = new HashEntry<K, V>(hash, key, value, first);
int c = count + 1;
if (c > threshold && tab.length < MAXIMUM_CAPACITY)
rehash(node);
else
setEntryAt(tab, index, node);
++modCount;
count = c;
oldValue = null;
break;
}
}
} finally {
unlock();
}
return oldValue;
}
scanAndLockForPut
保证一定要Segment加上锁
/**
* Scans for a node containing given key while trying to
* acquire lock, creating and returning one if not found. Upon
* return, guarantees that lock is held. UNlike in most
* methods, calls to method equals are not screened: Since
* traversal speed doesn't matter, we might as well help warm
* up the associated code and accesses as well.
*
* @return a new node if key not found, else null
*/
private HashEntry<K, V> scanAndLockForPut(K key, int hash, V value) {
HashEntry<K, V> first = entryForHash(this, hash);
HashEntry<K, V> e = first;
HashEntry<K, V> node = null;
int retries = -1; // negative while locating node
// 自旋锁,等待的过程可以执行其他流程
// 下面可以创建HashEntry node对象
while (!tryLock()) {
HashEntry<K, V> f; // to recheck first below
if (retries < 0) {
// e 是头节点,如果e==null,表示遍历到链表最后
if (e == null) {
if (node == null) // speculatively create node
node = new HashEntry<K, V>(hash, key, value, null);
retries = 0;
// 如果key已经存在,则不创建node对象
} else if (key.equals(e.key))
retries = 0;
else
// 相当于遍历链表
e = e.next;
// static final int MAX_SCAN_RETRIES =
// Runtime.getRuntime().availableProcessors() > 1 ? 64 : 1;
} else if (++retries > MAX_SCAN_RETRIES) {
// 超过阈值就会保证加上锁
lock();
break;
// retries & 1 保证偶数次重试的时候,判断头节点是不是一样的
// 如果头节点不一样表示头节点被修改,插入了元素
} else if ((retries & 1) == 0 &&
(f = entryForHash(this, hash)) != first) {
// 保证是最新的头节点
e = first = f; // re-traverse if entry changed
retries = -1;
}
}
return node;
}
GET方法
/**
* Returns the value to which the specified key is mapped,
* or {@code null} if this map contains no mapping for the key.
*
* More formally, if this map contains a mapping from a key
* {@code k} to a value {@code v} such that {@code key.equals(k)},
* then this method returns {@code v}; otherwise it returns
* {@code null}. (There can be at most one such mapping.)
*
* @throws NullPointerException if the specified key is null
*/
public V get(Object key) {
Segment<K, V> s; // manually integrate access methods to reduce overhead
HashEntry<K, V>[] tab;
int h = hash(key);
long u = (((h >>> segmentShift) & segmentMask) << SSHIFT) + SBASE;
if ((s = (Segment<K, V>) UNSAFE.getObjectVolatile(segments, u)) != null &&
(tab = s.table) != null) {
for (HashEntry<K, V> e = (HashEntry<K, V>) UNSAFE.getObjectVolatile
(tab, ((long) (((tab.length - 1) & h)) << TSHIFT) + TBASE);
e != null; e = e.next) {
K k;
if ((k = e.key) == key || (e.hash == h && key.equals(k)))
return e.value;
}
}
return null;
}
Size方法
本质上是遍历每一个segment,加上所有的node节点
public int size() {
// Try a few times to get accurate count. On failure due to
// continuous async changes in table, resort to locking.
final Segment<K, V>[] segments = this.segments;
int size;
boolean overflow; // true if size overflows 32 bits
long sum; // sum of modCounts
long last = 0L; // previous sum
int retries = -1; // first iteration isn't retry
try {
for (; ; ) {
if (retries++ == RETRIES_BEFORE_LOCK) {
for (int j = 0; j < segments.length; ++j)
ensureSegment(j).lock(); // force creation
}
sum = 0L;
size = 0;
overflow = false;
// 遍历每一个segments
for (int j = 0; j < segments.length; ++j) {
Segment<K, V> seg = segmentAt(segments, j);
if (seg != null) {
sum += seg.modCount;
int c = seg.count;
if (c < 0 || (size += c) < 0)
overflow = true;
}
}
if (sum == last)
break;
last = sum;
}
} finally {
if (retries > RETRIES_BEFORE_LOCK) {
for (int j = 0; j < segments.length; ++j)
segmentAt(segments, j).unlock();
}
}
return overflow ? Integer.MAX_VALUE : size;
}
总结
ConcurrentHashMap采用了分段锁的设计,当需要put元素的时候,并不是对整个hashmap进行加锁,而是先通过hashcode来知道要放在哪一个分段中,然后对这个分段进行加锁,所以当多线程put的时候,只要不是放在一个分段中,就没有锁竞争,实现真正的并行插入。相比于对整个Map加锁的设计,分段锁大大的提高了高并发环境下的处理能力。但同时,由于不是对整个Map加锁,导致一些需要扫描整个Map的方法(如size(), containsValue())需要使用特殊的实现,另外一些方法(如clear())甚至放弃了对一致性的要求(ConcurrentHashMap是弱一致性的)。
假如new ConcurrentHashMap(32, 0.75, 16)就是新建了一个ConcurrentHashMap,他的容量是32,分段锁的个数是16,也就是每个Segment里面HashEntry[]数组的长度是2。但是new ConcurrentHashMap()时,每个Segment里面HashEntry[]数组的长度也是2,因为ConcurrentHashMap规定了Segment数组中HashEntry数组的长度是2。