UART0串口编程系列(二)
串口编程(UART0)之中断方式
---------------------------------------------------------
Author :tiger-john
WebSite :blog.csdn.net/tigerjb
Email :[email protected]
Update-Time : 2011年1月23日星期日
Tiger声明:本人鄙视直接复制本人文章而不加出处的个人或团体,但不排斥别人转载tiger-john的文章,只是请您注明出处并和本人联系或留言给我。3Q
---------------------------------------------------------
三. 中断方式的串口编程
1.用中断方式编写串口程序由那几部分组成

2.硬件上的支持
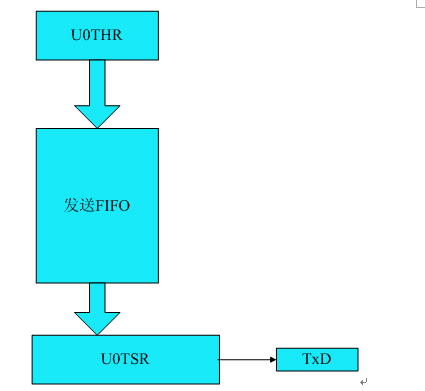
1>UART0 发送FIFO缓冲区
A. UART0含有1个16字节的发送FIFO缓冲区
B. U0THR是UART0发送FIFO的最高字节
C. UART的发送FIFO是一直使能的
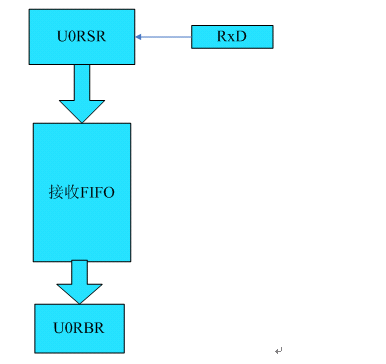
2>UART0接收FIFO缓冲区
A. UART0含有一个16字节的接收FIFO缓冲区。
B. 软件设置接收FIFO缓冲区的触发字节。
3> 中断接口:UART0的中断接口包含中断使能寄存器(U0IER)和中断标识寄存器(U0IIR)。
l U0IIR:提供状态码用于指示一个挂起中断的中断源和优先级。
l U0IER可以控制UART0的4个中断源。
4> UART0有4个中断源:
A. RLS(接收线状态)中断:
(1) 优先级最高
(2) 它在以下条件发生时产生错误
l 帧错误(FE)
l 溢出错误(OE)
l 奇偶错误(PE)
l 间隔中断(BI)
注:
Ø 可以通过查看U0LSR[4:1]中的值看到产生该中断的错误条件
Ø 读取U0LSR寄存器时清除该中断。
B. RDA(接收数据可用)中断:
(1)与CTI中断并列第二优先级。
(2)在以下情况触发中断:
l 当接收的有效数据到达接收FIFO设置寄存器(U0FCR)中设置的触发点时,RDA被激活。当接收FIFO中的有效数据少于触发点时,RDA复位。
l 中断过程:
1> 移位寄存器(U0RSR)从RxD引脚接收串行数据后,送入接收FIFO中
2> 当接收FIFO中的有效数据数量达到预定的触发点时,置位RDA中断。
3> 从U0RBR寄存器中读取FIFO中最早到达的数据,当FIFO中的有效数据小于触发点时,清零RDA中断。
C. CTI(字符超时指示)中断
(1) 优先级为2.
(2) 在以下情况发生中断:
l 当接收FIFO中的有效数据少于预定的触发点数量时,如果在一定时间内仍没有接收到新的数据,那将触发该中断。
(3) 上面的时间指的是:3.5~4.5个字节所需要的时间。
(4) 对接收FIFO的任何操作都会清零该中断标志。
(5) 中断过程:
l 移位寄存器(U0RSR)从RxD0引脚接收串行数据后,送入接收FIFO中。
l 当接收FIFO中的有效数据少于触发个数,但如果长时间没有数据到达,则触发CTI中断。
l 从U0RBR中读取接收FIFO中的数据,或者有新的数据送入接收FIFO,都将清零CTI中断。
注:
Ø 3.5~4.5个字节的时间:指在串口当前的波特率下,发送3.5~4.5个字节所需要的时间。
Ø 当接收FIFO中存放多个数据,从U0RBR读取数据,但是没有读完所有数据,那么在经过3.5~4.5个字节的时间后触发CTI中断。
D. THRE(发送)中断
(1) 优先级为第三级优先级。
(2) 当FIFO为空并且在以下情况触发中断:
l 系统启动时,虽然发送FIFO为空,但不会产生THRE中断。
l 在上一次发生THRE中断后,向发送FIFO中写入1个字节数据,将在一个字节加上一个停止位后发生THRE中断
(because:如果发送移位寄存器为空,那么写入发送FIFO的数据将直接进入发送移位寄存器。此时发送FIFO仍然为空,如果立即产生THRE中断,就会影响紧接着写入发送FIFO的数据。
所以在发送完该一个字节以及一个停止位后,才产生THRE中断。
l 如果在发送FIFO中有过两个字节以上的数据,但是现在发送FIFO为空时,将立即触发THRE中断。
l 当THRE中断为当前有效的最高优先级中断时,往U0THR写数或者对U0IIR的读操作,将使THRE中断复位
我们来看看这些中断源与存储器之间的关系:
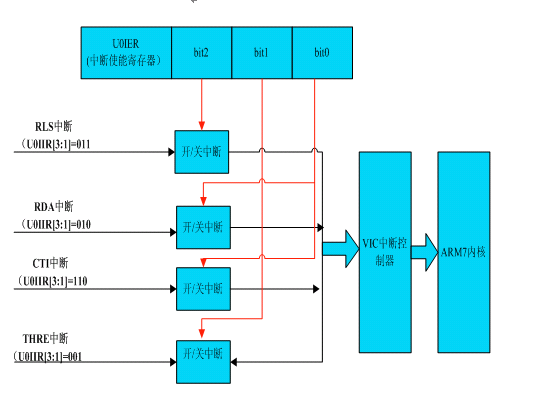
注:
Ø 由上图可知:UART0有4个中断源:分别是RLS(线状态)中断,RDA(接收数据)中断,CTI(字符超时)中断,THRE(发送数据)中断。
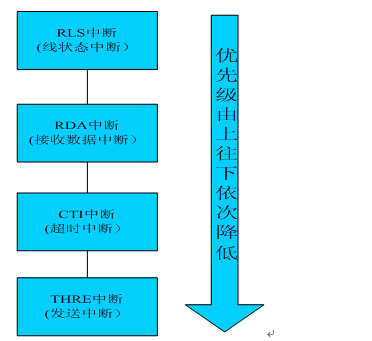
Ø 4个中断源的优先级如下图所示:
3.串口中断接收初始化
1>串口中断接收初始化流程
l 设置I/O引脚连接到UART0
l 置位除数锁存位,配置UART0帧数据格式
l 根据波特率计算分频值
l 设置波特率
l 清除除数锁存位,并设置工作模式
l 使能FIFO,并设置触发点
l 允许RBR中断
注:我们可以发现与轮训方式相比,中断方式只是增加了使能 FIFO, 并设置中断触发点和允许 RBR 中断两步。
2>中断串口初始化需要配置的寄存器
(与轮循方式配置方法相同的寄存器在此处不在涉及)
l U0FCR(FIFO控制寄存器):U0FCR控制UART0 Rx和Tx FIFO的操作。
l U0IER(中断使能寄存器):U0IER用于使能4个UART0中断源。
3>具体寄存器的配置
(1) U0FCR
A作用:控制UART0 Rx和Tx的操作。
B长度:8位寄存器。
C:每一位的含义:
l 第0位:表示FIFO使能
置1:表示使能对UART0 Rx和Tx 的FIFO以及U0FCR[7:1]的访问。
置0:表示不能使用Rx和Tx的FIFO以及步能对U0FCR[7:1]的访问。
注:该位的任何变化都将使UART0 FIFO清空。
l 第1位:表示Rx FIFO的复位。
置1:会清零UART0 RxFIFO中的所有字节并复位指针逻辑。该位自动清零。
l 第2位:表示Tx FIFO的复位。
置1:会清零UART0 TxFIFO中的所有字节并复位指针逻辑。改位自动清零。
l 第[5:3]位:保留位,用户不能对其进行操作。从保留位读出的值未被定义。
l 第[7:6]位:表示Rx 触发选择
00:触发点为0(默认为1字节)
01:触发点为1(默认为4字节)
10:触发点为2(默认为8字节)
11: 触发点为3(默认为14字节)
注:这两个位决定在激活中断之前,接收UART0 FIFO必须写入个字符。
(2) U0IER(中断使能寄存器)
A 作用:U0IER用于使能4个UART0中断源
B 长度:8位寄存器
C每一位的含义:
l 第0位:表示RBR中断使能
置1:使能RDA中断
置0:禁止RDA中断
注:U0IEER 第零位使能UART0接收数据可用中断。它还控制(CTI)字符接收超时中断。
l 第1位:表示THRE中断使能
置1:使能THRE中断
置0:禁止THRE中断
l 第2位:表示Rx线状态中断使能
置1:使能Rx线状态中断
置0:禁止RX线状态中断
注:U0IER第二位使能UART0 Rx线状态中断。该中断的状态可从U0LSR[4:1]读出
l 第[7:3]位:是保留位
注:用户不能向其写入1.
4>串口初始化程序:
***********************************************************
* 作者: tiger-john
* 时间: 2011年1月18日
* 名称: UART0_Init
* 功能: UART0初始化 通讯波特率115200,8位数据位, 1位停止位,无奇偶校验
* 接收FIFO触发点为8字节,使能RDR(接收数据)中断
* 入口参数: bps 串口波特率
* 出口参数: 无
****************************************************************************/
void UART0_Init(uint32 bps)
{
uint16 Fdiv;
PINSEL0 = (PINSEL0 & ~(0xf) | 0x05) ; //设置UART0的引脚
U0LCR = 0x83; //置为除数锁存位,进行配置
Fdiv = (Fpclk>>4)/bps;
U0DLM = Fdiv>>8;
U0DLL = Fdiv%256;
U0LCR = 0x03; //清除除数锁存位,并设置工作模式
U0FCR = 0x81; // 使能FIFO,并设置触发点为8字节
U0IER = 0x01; // 允许RBR中断,即接收中断
}
5. 中断初始化
先来看一下UART0和VIC之间的关系:

1>中断初始化流程:
l 选择中断为向量中断或快速中断
l 分配中断通道
l 设置UART0向量地址
l 使能UART0中断
2>关于ARM中断编程方法和寄存器的使用在此不做涉及(如果想知道的话,可以看这篇文章http://blog.csdn.net/tigerjb/archive/2010/11/30/6045409.aspx
3>中断初始化程序:
/**********************************************************
* 作者: tiger-john
* 时间: 2011年1月18日
* 名称: Interrupt_Init
* 功能: 初始化串口中断,给串口中断选择为向量中断, 分配向量通道号1给串口
* 入口参数: 无
* 出口参数: 无
**********************************************************/
void Interrupt_Init (void)
{
VICIntSelect = 0x00000000; // 设置所有通道为IRQ中断
VICVectCntl1 = (0x20 | 6); // UART0中断通道分配到IRQ slot 1
VICVectAddr1 = (uint32)UART0_Exception; // 设置UART0向量地址
VICIntEnable = 1 << 6; //使能串口中断
}
6. 用中断编写接收函数
1> 中断服务函数流程
l 清除串口中断标识寄存器(U0IIR)
l 清除中断标志
l 读取接收FIFO中的数据
2> 中断函数服务函数中需要配置的寄存器
(1) U0IIR中断标识寄存器。
l 第0位:表示中断挂起
置1:表示没有挂起的中断
置0:表示至少有一个中断挂起
l 第[3:1]位:中断标识,这三位表示了对应UART0 Rx FIFO的中断。
001:表示发送中断(THRE)
010: 表示接收数据可用中断(RDA)
011: 表示接收线状态中断(RLS)
110: 表示字符超时中断(CTI)
l 第[7:4]:是保留位
注:
1. U0IIR提供的状态码可用于指示一个挂起中断的中断源和优先级。
2. 在访问U0IIR过程中,中断被冻结
3. 如果在访问U0IIR时,产生了中断,该中断被记录。在下次访问U0IIR时可以读出,避免中断的丢失。
3> 中断服务函数程序:
/****************************************************** * * 名 称:IRQ_UART0()
* 功 能:串口UART0中断接收8个字节的数据
* 入口参数:无
* 出口参数:无
**********************************************************/
uint8 rcv_buf[8]; // UART0数据接收缓冲区
void __irq IRQ_UART0(void)
{ uint8 i;
uint32 data;
data = U0IIR; //清除中断表示寄存器标志
VICVectAddr = 0; //清除中断
for(i=0; i<8; i++)
{
rcv_buf[i] = U0RBR; // 读取FIFO的数据
}
}
7. 看一个总程序:
- /****************************************Copyright (c)**************************************************
- ** 西安邮电学院
- ** graduate school
- ** XNMS实验室
- ** Author:冀博
- ** Time:2011年1月20日
- ** http://blog.csdn.net/tigerjb
- **
- **--------------File Info-------------------------------------------------------------------------------
- ** File name: UART0_while
- ** Last modified Date: 2011-01-20
- ** Last Version: 1.0
- ** Descriptions: 通过上位机给串口发送8字节数据,ARM2200接收到串口数据后,把数据又发送回上位机
- **------------------------------------------------------------------------------------------------------*/
- /**********************************************************************************
- ** Modified by: TIGER0-JOHN
- ** Modified date: 2011-1-21
- ** Version: 2.0
- ** Descriptions: 测试成功
- 在用中断的时候在Startup.S文件中的InitStack子程序中,修改设置
- 系统模式堆栈处的代码为"MSR CPSR_c,#0x5f"
- 测试成功 ,在上面上发送16进制数时,每个之间用空格隔开
- 不加前缀
- ********************************************************************************/
- #include "config.h"
- uint8 recver_buffer[8];
- uint8 rcv_new;
- /**********************************************************
- * 名称: UART0_Init()
- * 功能: UART0初始化(通讯波特率115200,8位数据位,
- 1位停止位,无奇偶校验)
- * 入口参数: bps 串口波特率
- * 出口参数: 无
- **********************************************************/
- void UART0_Init(uint32 bps)
- {
- uint16 Fdiv;
- PINSEL0 = 0x00000005; //设置串口引脚
- U0LCR = 0x83; //置为除数锁存位,进行配置
- Fdiv = (Fpclk >> 4) / bps; // 设置波特率
- U0DLM = Fdiv >> 8;
- U0DLL = Fdiv & 0xff;
- U0LCR = 0x03; //清除除数锁存位,并设置工作模式模式
- U0FCR = 0x81; // 使能FIFO,并设置触发点为8字节
- U0IER = 0x01; // 允许RBR中断,即接收中断
- }
- /*********************************************************
- * 名 称: IRQ_UART0
- * 功 能: 串口UART0中断接收8个字节的数据
- * 入口参数: 无
- * 出口参数: 无
- **********************************************************/
- void __irq IRQ_UART0(void)
- { uint8 i;
- if( 0x04 == (U0IIR&0x0F) )
- {
- rcv_new = 1; // 设置接收到新的数据标志,并清除中断标志位
- for(i=0; i<8; i++)
- {
- recver_buffer[i] = U0RBR; // 读取FIFO的数据
- }
- VICVectAddr = 0;
- } //清除中断
- }
- /**********************************************************
- * 名称: Interrupt_Init
- * 功能: 初始化串口中断,给串口中断选择为向量中断,
- * 分配向量通道号1给串口
- * 入口参数: 无
- * 出口参数: 无
- **********************************************************/
- void Interrupt_Init (void)
- {
- VICIntSelect = 0x00000000; // 设置所有通道为IRQ中断
- VICVectCntl0 = 0x26; // UART0中断通道分配到IRQ slot 0,即优先级最高
- VICVectAddr0 = (int)IRQ_UART0; // 设置UART0向量地址
- VICIntEnable = 0x00000040; // 使能UART0中断
- }
- /**********************************************************
- * 名 称: UART0_SendByte
- * 功 能: 向串口发送字节数据,并等待发送完毕。
- * 入口参数: data 要发送的数据
- * 出口参数: 无
- **********************************************************/
- void UART0_SendByte(uint8 data)
- {
- U0THR = data;
- while(0 == (U0LSR & 0x40));
- }
- /**********************************************************
- * 名称: UART0_SendBuf()
- * 功能: 通过串口发送一帧数据
- * 入口参数: *buffer 存放一帧数据
- * 出口参数: 无
- **********************************************************/
- void UART0_SendBuf(uint8 *buffer)
- {
- uint8 *pbuffer;
- uint8 i;
- for(pbuffer = buffer,i = 0;i < 8; i++)
- UART0_SendByte(*(pbuffer++));
- }
- /**********************************************************
- * 名称: main()函数
- * 功能: 上位机接收的数据开头两个字符为0x10,0x11,
- * 则原样输出,否次输出0x20,0x21,0x22,0x23,0x24,0x25,0x26,0x27
- * 入口参数: *buffer 存放一帧数据
- * 出口参数: 无
- **********************************************************/
- int main (void)
- {
- uint8 send_buffer[8] ={0x20,0x21,0x22,0x23,0x24,0x25,0x26,0x27}; //定义发送帧缓冲区
- UART0_Init(115200);
- Interrupt_Init();
- while(1)
- {
- if(1 == rcv_new) // 是否已经接收到8 Bytes的数据
- {
- rcv_new = 0; // 清除标志
- if(0x10 ==recver_buffer[0] && 0x11 == recver_buffer[1])
- {
- UART0_SendBuf(send_buffer);
- }
- else
- {
- UART0_SendBuf(recver_buffer);
- }
- }
- }
- return 0;
- }
- /*********************************************************************************************************
- ** End Of File
- ********************************************************************************************************/
四.用中断编写发送函数
1.中断初始化
同上和用中断接收函数时的中断初始化是一样的
2.串口初始化
1>串口初始化流程:
l 设置I/O引脚连接到UART0
l 置位除数锁存位,配置UART0帧格式
l 根据波特率计算分频值
l 设置波特率
l 清除除数锁存位,并设置工作模式
l 使能FIFO,并使TxFIFO复位
l 使能THRE中断
2>串口初始化函数:
/**********************************************************
* 名称: UART0_Init
* 功能: UART0初始化 通讯波特率115200,8位数据位,1位停止位,无奇偶校验
* 使能TxFIFO,和THRE中断
* 入口参数: bps 串口波特率
* 出口参数: 无
**********************************************************/
void UART0_Init(uint32 bps)
{
uint16 Fdiv;
PINSEL0 = (PINSEL0 & ~(0xf) | 0x05) ; //设置UART0的引脚
U0LCR = 0x83; //置位除数锁存位,配置UART0帧格式
Fdiv = (Fpclk>>4)/bps; //根据波特率计算分频值
U0DLM = Fdiv>>8; //设置波特率
U0DLL = Fdiv%256;
U0LCR = 0x03; // 清除除数锁存位,并设置工作模式
U0FCR = 0x05; // 使能TxFIFO,并使TxFIFO复位
U0IER = 0x02; // 使能THRE中断
}
3中断服务函数:
1>中断服务函数流程:
l 清除串口中断标识寄存器
l 清除中断控制标识寄存器
2>中断发送服务函数程序:
/**********************************************************
* 名 称: UART0_Exception
* 功 能: 串口发送中断
* 入口参数: 无
* 出口参数: data 发送的数据
**********************************************************/
void __irq IRQ_UART0(void)
{
uint32 data;
data = U0IIR; //清除中断表示寄存器标志
VICVectAddr = 0; //清除中断
}
4. 用串口中断发送函数的总程序:
- /****************************************Copyright (c)**************************************************
- ** 西安邮电学院
- ** graduate school
- ** XNMS实验室
- ** Author:冀博
- ** Time:2011年1月20日
- ** http://blog.csdn.net/tigerjb
- **
- **--------------File Info-------------------------------------------------------------------------------
- ** File name: UART0_while
- ** Last modified Date: 2011-01-20
- ** Last Version: 1.0
- ** Descriptions: 通过上位机给串口发送8字节数据,ARM2200接收到串口数据后,用中断方式把数据又发送回上位机
- **------------------------------------------------------------------------------------------------------*/
- /**********************************************************************************
- ** Modified by: TIGER0-JOHN
- ** Modified date: 2011-1-21
- ** Version: 2.0
- ** Descriptions: 测试成功
- 在用中断的时候在Startup.S文件中的InitStack子程序中,修改设置
- 系统模式堆栈处的代码为"MSR CPSR_c,#0x5f"
- 测试成功 ,在上面上发送16进制数时,每个之间用空格隔开
- 不加前缀
- ********************************************************************************/
- #include "config.h"
- uint8 recver_buffer[8];
- uint8 rcv_new;
- /****************************************************************************
- * 名称: UART0_Init
- * 功能: UART0初始化 通讯波特率115200,8位数据位,1位停止位,无奇偶校验
- * 使能TxFIFO,和THRE中断
- * 入口参数: bps 串口波特率
- * 出口参数: 无
- ****************************************************************************/
- void UART0_Init(uint32 bps)
- {
- uint16 Fdiv;
- PINSEL0 = (PINSEL0 & ~(0xf) | 0x05) ; //设置UART0的引脚
- U0LCR = 0x83; //置位除数锁存位,配置UART0帧格式
- Fdiv = (Fpclk>>4)/bps; //根据波特率计算分频值
- U0DLM = Fdiv>>8; //设置波特率
- U0DLL = Fdiv%256;
- U0LCR = 0x03; // 清除除数锁存位,并设置工作模式
- U0FCR = 0x05; // 使能TxFIFO,并使TxFIFO复位
- U0IER = 0x02; // 使能THRE中断
- }
- /****************************************************************************
- * 名 称: UART0_Exception
- * 功 能: 串口发送中断
- * 入口参数: 无
- * 出口参数: data 发送的数据
- ****************************************************************************/
- void __irq IRQ_UART0(void)
- {
- uint32 data;
- data = U0IIR; //清除中断表示寄存器标志
- VICVectAddr = 0; //清除中断
- }
- /**********************************************************
- * 名称: Interrupt_Init
- * 功能: 初始化串口中断,给串口中断选择为向量中断,
- * 分配向量通道号1给串口
- * 入口参数: 无
- * 出口参数: 无
- **********************************************************/
- void Interrupt_Init (void)
- {
- VICIntSelect = 0x00000000; // 设置所有通道为IRQ中断
- VICVectCntl0 = 0x26; // UART0中断通道分配到IRQ slot 0,即优先级最高
- VICVectAddr0 = (int)IRQ_UART0; // 设置UART0向量地址
- VICIntEnable = 0x00000040; // 使能UART0中断
- }
- /**********************************************************
- * 名 称: UART0_RcvByte
- * 功 能: 用查询方式接收一字节的数据
- * 入口参数: 无
- * 出口参数: data 要接收的数据
- **********************************************************/
- uint8 UART0_RcvByte(void)
- {
- uint8 rcv_data ;
- while((U0LSR&0X01)==0); //等待数据到达
- rcv_data = U0RBR; //从U0RBR中读出接收到的数据
- return rcv_data; //返回接收到的数据
- }
- /**********************************************************
- * 名称: UART0_RecBuf()
- * 功能: 接收串口发送过来的帧数据,
- * 入口参数: *buffer 存放一帧数据
- * 出口参数: 无
- **********************************************************/
- void UART0_RecBuf (uint8 *buffer)
- {
- uint8 *pbuffer;
- uint8 i;
- for(pbuffer = buffer, i = 0;i < 8; i++)
- {
- *(pbuffer++) = UART0_RcvByte();
- }
- }
- /**********************************************************
- * 名称: main()函数
- * 功能: 上位机接收的数据开头两个字符为0x10,0x11,
- * 则原样输出,否次输出0x20,0x21,0x22,0x23,0x24,0x25,0x26,0x27
- * 入口参数: *buffer 存放一帧数据
- * 出口参数: 无
- **********************************************************/
- int main (void)
- {
- uint8 i;
- uint8 send_buffer[8] ={0x20,0x21,0x22,0x23,0x24,0x25,0x26,0x27}; //定义发送帧缓冲区
- UART0_Init(115200);
- Interrupt_Init();
- while(1)
- {
- UART0_RecBuf(recver_buffer); //接收8字节数据
- if(0x10 ==recver_buffer[0] && 0x11 == recver_buffer[1])
- {
- for(i = 0;i < 8 ;i++)
- {
- U0THR = send_buffer[i]; //用中断发送每次8字节
- }
- }
- else
- {
- for(i = 0;i < 8;i++) //用中断发送每次8字节
- {
- U0THR = recver_buffer[i];
- }
- }
- }
- return 0;
- }
- /*********************************************************************************************************
- ** End Of File
- ********************************************************************************************************/