【计算机视觉】Lecture 22:相机运动
移动的相机

相机拍摄由时间t索引的图像(帧)序列
从一个时间到下一个时间,相机经历旋转(滚转、俯仰、偏航)和平移(tx、ty、tz)
运动(位移)场

运动场Motion Field和光流Optic Flow
运动场:三维相对速度矢量在二维图像平面上的投影
光流:在图像中观察到的亮度模式(brightness patterns)的二维位移
运动场是我们想知道的。
光流是我们可以估计的。
有时光流是对未知运动流的一个很好的近似。

然后我们可以推断相机和世界中的物体之间的相对运动。
注意:光流不等于运动场
考虑一个移动的光源:
MF=0,因为场景中的点没有移动
OF不等于0,因为图像中存在移动模式
运动场
我们将推导一个三维场景结构和速度与二维运动流场的关系方程。
什么是场field?
在空间中的每个点上绘制一个向量。这是一个向量场。在三维空间中,我们将研究由相机运动引起的三维速度矢量场。
在二维中,我们将看到三维速度矢量在图像中的投影。图像中的每个点都有一个二维流矢量。这是二维运动流场。
回忆:一般的投影方程

策略:
- 假设内参已知(设置为I)
- 时间 t 时,设 R = I,T = 0
- 时间 t + 1 时,运动产生相对的 R 和 T(简化假设:小运动–>小旋转)
- 计算三维速度向量
- 计算二维速度向量(X,Y,Z,R,T,f 的函数)
三维世界点的位移
时间 t:三维世界点 P
时间 t + 1:三维世界点 RP + T
三维位移 = RP + T - P
现在考虑短时间段(比如两个视频帧之间的时间=1/30秒)。可以假设在那个时间段内有一个小的旋转角度。进行小角度近似并重写位移。在极限(无穷小的时间周期)中,我们会得到一个速度。
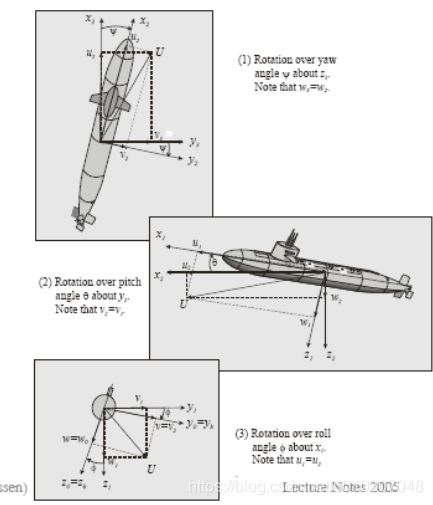
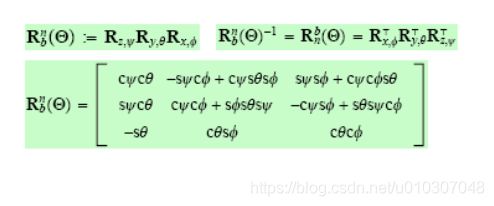
用欧拉角写出旋转矩阵
欧拉角变换
三个主旋转
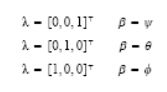

线性速度变换(zyx转换—rpy)
![]()
![]()
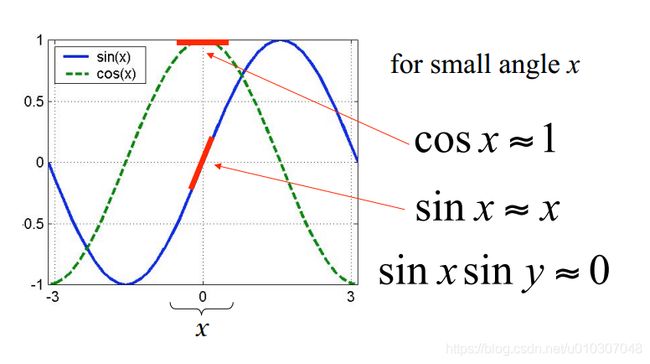
小角度近似
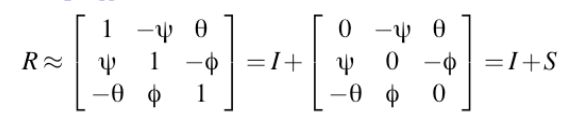
三维速度
在小角度近似下,位移 = RP + T - P = (I + S)P + T - P = SP + T
其中,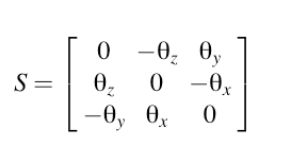
注意:
时间 t 取极限情况下,位移变成速度

其中 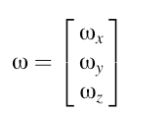
三维相对速度
关于相机点 P 的相对速度
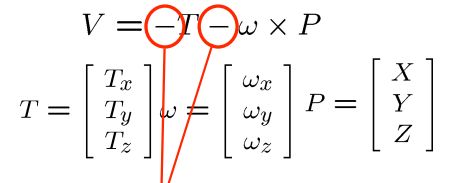
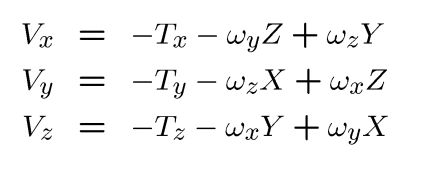
•我们刚刚推导了一个方程,将R,T和每个场景点(相机坐标系下)的三维速度矢量联系起来。
•我们可以把速度看作场景中的一个小矢量。
•现在问一下,这个向量在图像中的投影是什么样子的?它是一个二维向量。它是构成运动场的矢量之一!
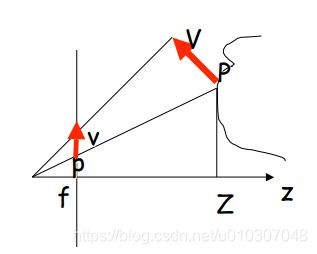
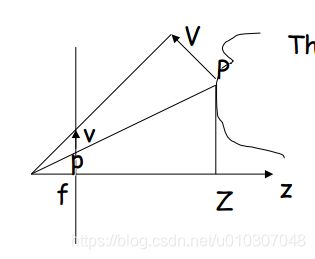
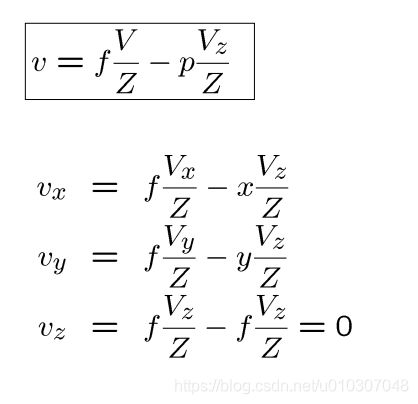
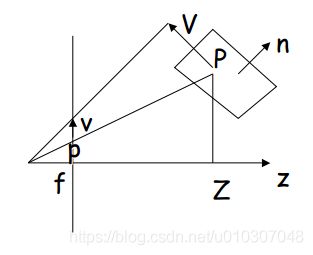
运动场:p 的二维速度
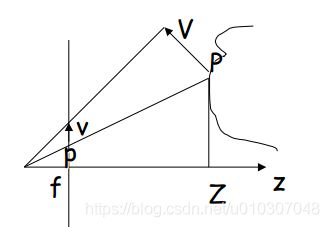
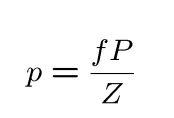
透视投影
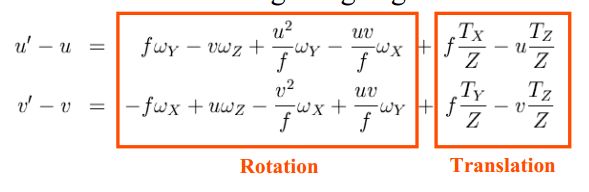
上式对时间求导


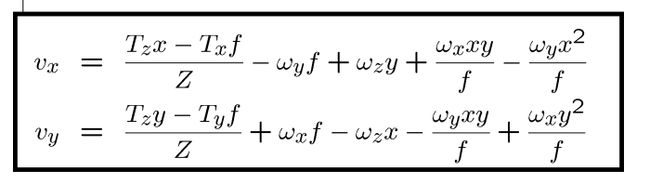
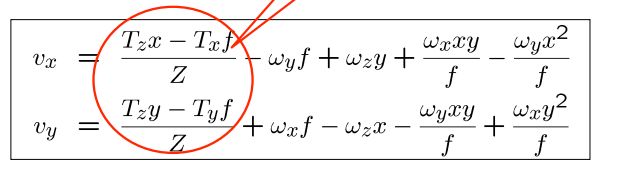
以上红圈为平移部分
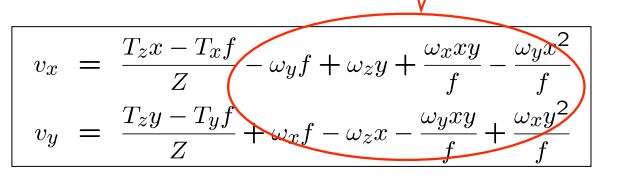
以上红圈为旋转部分
注意:旋转分量与深度Z无关!
特例1:纯平移

假设 Tz 不等于 0
定义: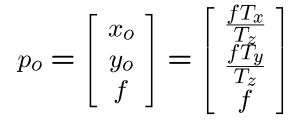

假如 Tz = 0 则
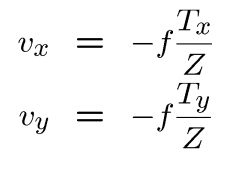
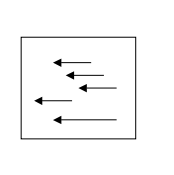
所有运动场矢量彼此平行,并且与深度成反比!(与简单的立体视觉联系起来)
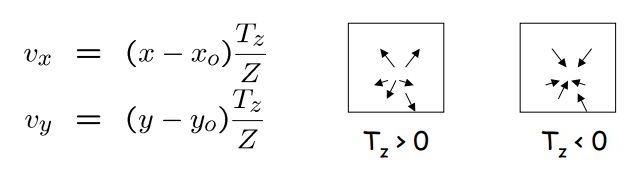
此情况下的运动场是径向的:
- 它由通过 po=(xo,yo)的向量组成
- 假如:
1)Tz > 0 (相机向物体移动)
向量远离po
po是扩展点 POINT OF EXPANSION
2)Tz < 0 (相机远离物体)
向量指向po
po是收缩点 POINT OF CONTRACTION
纯旋转:运动场的性质
假如 Tz 不等于0,则运动场是径向的,所有向量都指向(或远离)单个点po。如果Tz=0,则运动场是平行的。
运动场向量的长度与深度Z成反比。如果Tz≠0,它也与p和po之间的距离成正比
po是平移方向的灭点(vanishing point)
po是平行于平移向量的光线与图像平面的交点
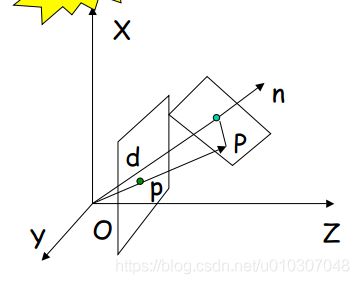
特例2:移动平面
 问题:移动平面的运动场是什么样子的?
问题:移动平面的运动场是什么样子的?
平面上的点必须满足描述平面的方程

其中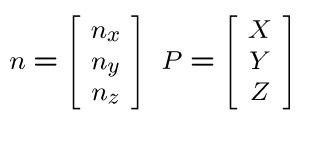
n 是垂直于平面的单位向量
d 是从平面到原点的距离
注意:如果平面是在相机坐标系下移动,则 n 和 d 是时间的函数
令  成为 P 的成像点
成为 P 的成像点
使用小孔投影方程:
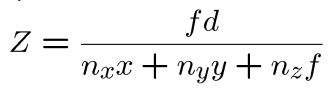
使用平面方程:
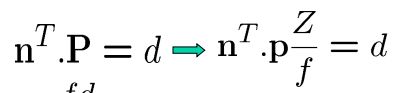
解出Z :
考虑运动场方程
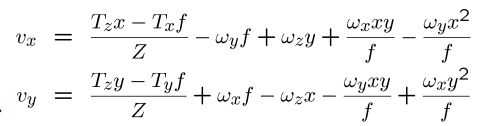
将 Z 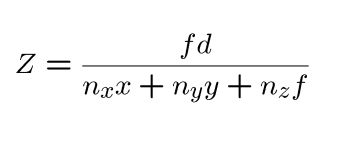 代入,则运动场方程变为:
代入,则运动场方程变为:
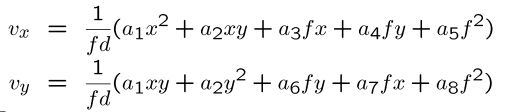
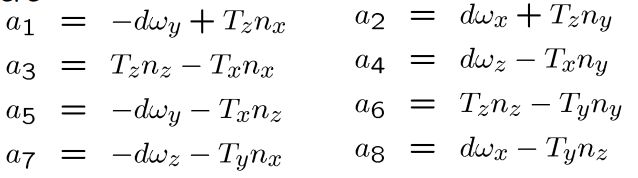
运动场向量由低阶(二次)多项式给出。
•他们的系数。a1到a8(仅8个!)是 n,d,T 和 ω 的函数。
•也就是说,可以估计 8 个参数的全局流flow,而不是每个像素2个参数!大大节省了时间和增强了鲁棒性。
应用:碰撞时间
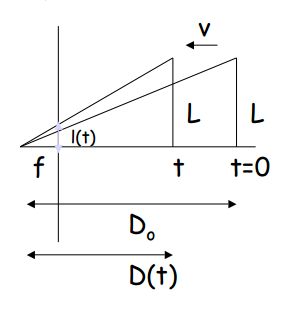
高度 L 的物体以恒定速度v移动:
时间 t = 0 时,物体在:D(0) = Do
时间 t 时,物体在:D(t) = Do - vt
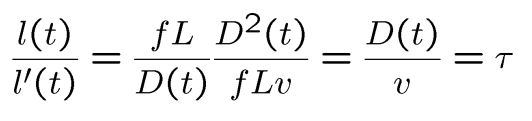
它将在以下时间撞向相机:D(τ) = Do – vτ = 0,τ = Do/v
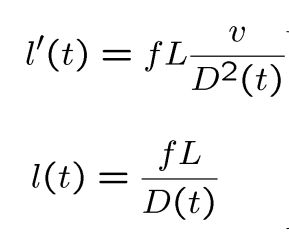
物体在成像平面上的大小为 l(t)

上式对时间求导
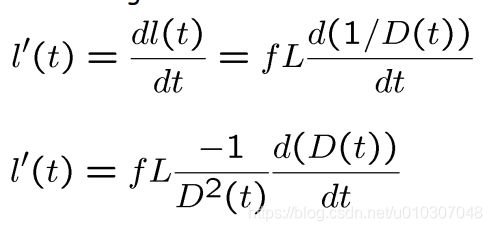
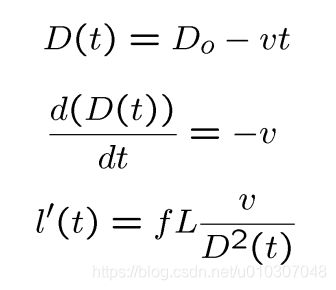
比例为:
上两式可以直接从成像平面上测量得到
碰撞时间:

不需要知道 L, Do, v,就可以计算碰撞时间
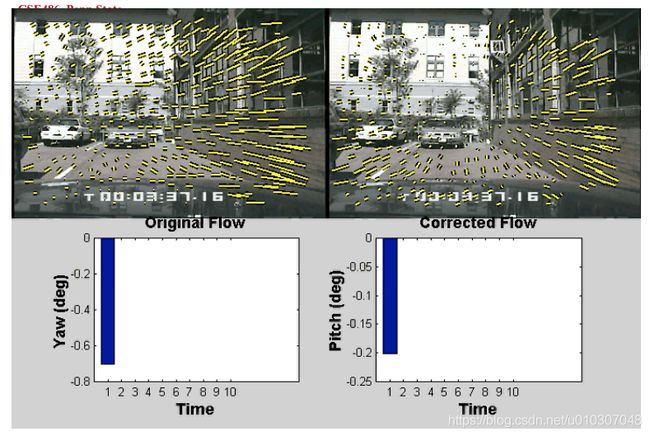
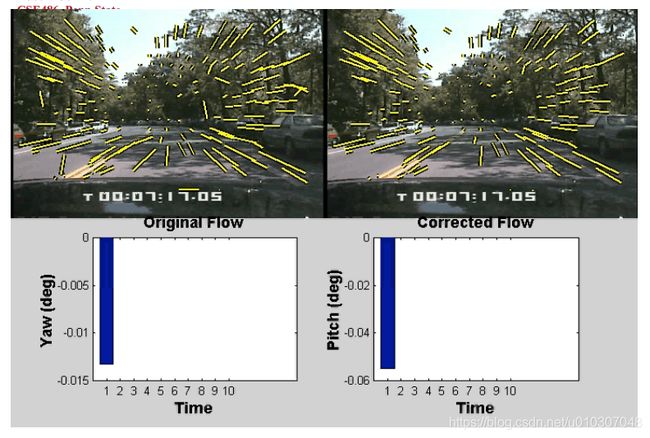
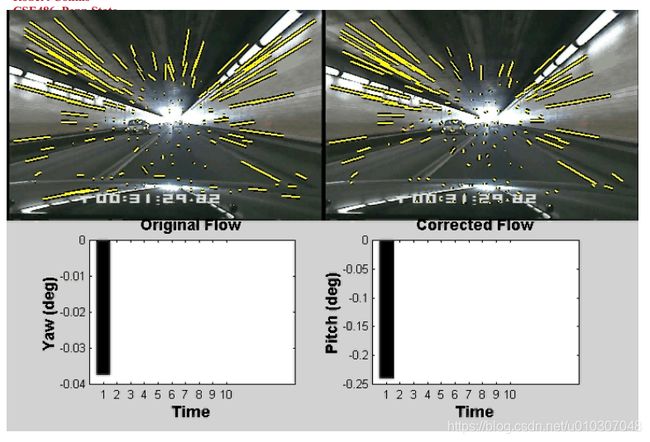
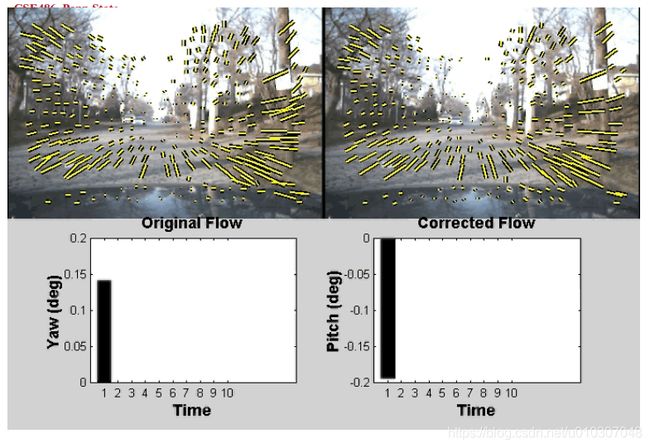
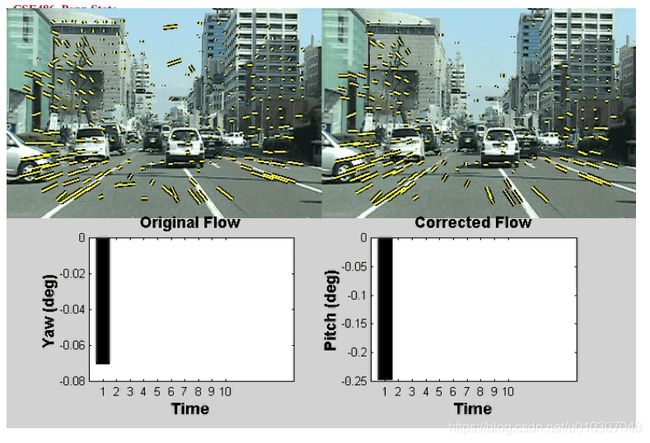
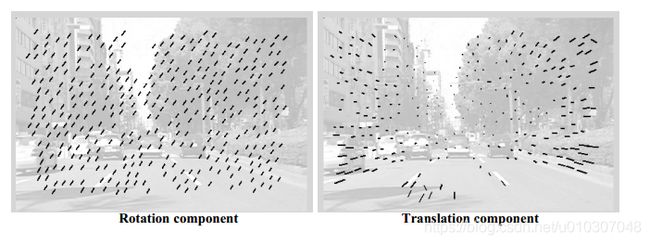
应用:将车辆流场分解为旋转和平移分量
动机
• 估计转向角
• 当移除旋转运动时,简化了场景结构的计算
回顾:由于自身运动产生的场
流(Flow):
方法
利用汽车可能的运动的先验知识来简化问题。
假设我们知道平移(Tx,Ty,Tz)的近似方向
[例如,如果向前行驶,我们选择(0,0,1)]
假设滚转角(wz)为0
问题简化为解决俯仰角和偏航角(wx和wy)

对于每个观测到的流矢量,通过取流方程和一个新矢量(该矢量被构造成“消除”平移分量)的点积,在wx和wy上形成一个线
性约束。
这个消除矢量为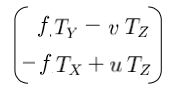 这其中所有的量都是已知的。
这其中所有的量都是已知的。
验证:
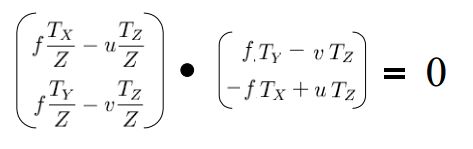
对于每个观测到的流矢量,我们消除平移分量以形成形式为(ai wx+bi wy+ci)=0 的一个线性约束。
给定n个观测流矢量的集合,我们寻找同时满足n个线性方程组的wx和wy

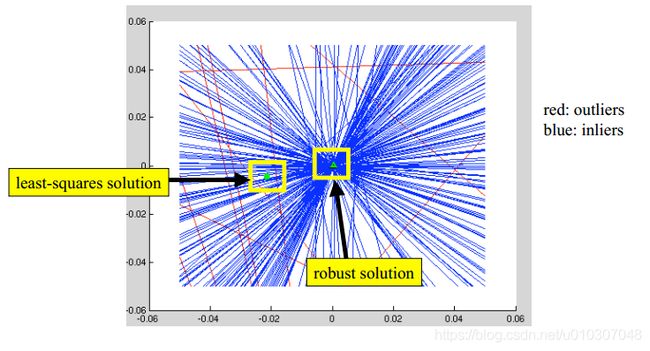
使用鲁棒估计器
使用最小二乘法求解将对外点(严重错误的数据)敏感。
相反,我们使用鲁棒估计(随机样本一致性-RANSAC)。