SSD目标检测原理详解
文章目录
- 1. 目标检测简介
-
- 1.1 SSD优缺点
- 2. SSD 原理
-
- 2.1 采用多尺度特征图用于检测
- 2.2 设置先验框
- 2.3 先验框scale缩放比例
- 2.4 先验框宽高比 aspect ratio
- 2.5 先验框中心点
- 2.6 构建先验框
- 3. 训练
-
- 3.1 先验框匹配
- 3.2 困难负样本挖掘
- 3.3 损失函数
-
- 3.3.1 位置偏移损失
- 3.3.2 置信度损失
- 3.4 训练部分小结
- 4. 数据增强
- 5. 参考
论文:SSD: Single Shot MultiBox Detector
代码:https://github.com/weiliu89/caffe/tree/ssd
1. 目标检测简介
当前主流的目标算法主要分为两个类型:
(1)two-stage方法,如R-CNN系算法,其主要思路是先通过启发式方法(selective search)或者CNN网络(RPN)产生一系列稀疏的候选框,然后对这些候选框进行分类与回归,two-stage方法的优势是准确度高;
(2)one-stage方法,如Yolo和SSD,其主要思路是均匀地在图片的不同位置进行密集抽样,抽样时可以采用不同尺度和长宽比,然后利用CNN提取特征后直接进行分类与回归,整个过程只需要一步,所以其优势是速度快,但是均匀的密集采样的一个重要缺点是训练比较困难,这主要是因为正样本与负样本(背景)极其不均衡,导致模型准确度稍低。
不同算法的性能如图1所示,可以看到两类方法在准确度和速度上的差异
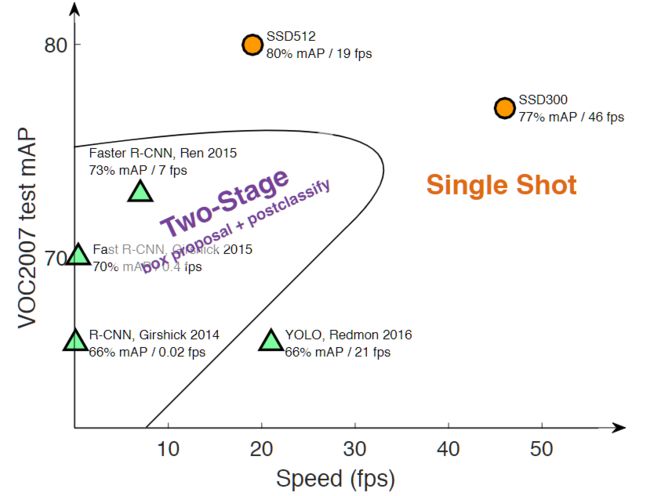
其中SSD512是指输入图片为 512 × 512 512 \times 512 512×512,同理SSD300为输入图片 是 300 × 300 300 \times 300 300×300
1.1 SSD优缺点
- 对于Faster R-CNN,其先通过CNN得到候选框,然后再进行分类与回归,而Yolo与SSD可以一步到位完成检测
- 相比Yolo,SSD采用CNN来直接进行检测,而不是像Yolo那样在全连接层之后做检测
- SSD提取了不同尺度的特征图来做检测,大尺度特征图(较靠前的特征图)可以用来检测小物体,而小尺度特征图(较靠后的特征图)用来检测大物体
- SSD采用了不同尺度和长宽比的先验框(Prior boxes, Default boxes,在Faster R-CNN中叫做锚,Anchors)
2. SSD 原理
SSD其基本结构如下图所示。
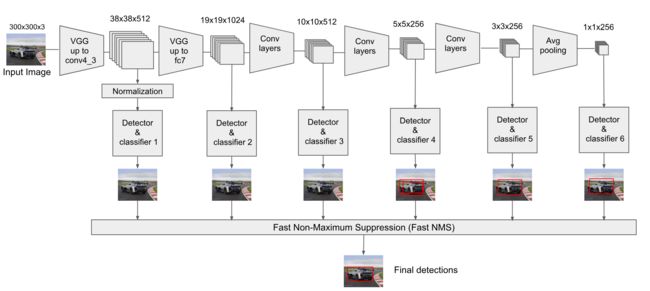
2.1 采用多尺度特征图用于检测
如上如所示,VGG网络的多个特征图都用于检测,这样做的好处是比较大的特征图来用来检测相对较小的目标,而小的特征图负责检测大目标。此外,与Yolo最后采用全连接层不同,SSD直接采用卷积对不同的特征图来进行提取检测结果。对于形状为 m × n × p m \times n \times p m×n×p 的特征图,只需要采用 3 × 3 × p 3 \times 3 \times p 3×3×p 这样比较小的卷积核得到检测值
2.2 设置先验框
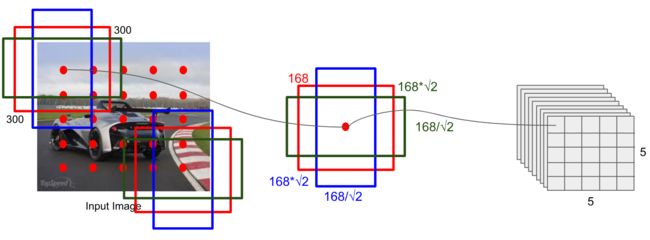
SSD借鉴了Faster R-CNN中anchor的理念,每个单元设置尺度或者长宽比不同的先验框,预测的边界框(bounding boxes)是以这些先验框为基准的,在一定程度上减少训练难度。一般情况下,每个单元会设置多个先验框,其尺度和长宽比存在差异如下图所示
对于每个单元的每个先验框,其都输出一套独立的检测值,对应一个边界框,主要分为两个部分。
- 第一部分是各个类别的置信度或者评分,SSD将背景也当做了一个特殊的类别,如果检测目标共有 c c c 个类别,SSD其实需要预测 c + 1 c+1 c+1 个置信度值,其中第一个置信度指的是不含目标或者属于背景的评分。后面当我们说 c c c 个类别置信度时,里面是包含背景那个特殊的类别,即真实的检测类别只有 c − 1 c-1 c−1 个。在预测过程中,置信度最高的那个类别就是边界框所属的类别,特别地,当第一个置信度值最高时,表示边界框中并不包含目标。
- 第二部分就是边界框的 location,包含4个值 ( c x , c y , w , h ) (c_x, c_y, w, h) (cx,cy,w,h) ,分别表示边界框的中心坐标以及宽和高。但是真实预测值其实只是边界框相对于先验框的偏移值(offset)。
先验框位置用 d = ( d c x , d c y , d w , d h ) d=(d^{cx}, d^{cy}, d^w, d^h) d=(dcx,dcy,dw,dh)表示,其对应边界框用 b = ( b c x , b c y , b w , b h ) b=(b^{cx}, b^{cy}, b^{w}, b^{h}) b=(bcx,bcy,bw,bh)表示,那么模型输出的预测值 l l l 其实是 b b b 相对于 d d d 的偏移值:
l c x = ( b c x − d c x ) / d w l c y = ( b c y − d c y ) / d h l w = l o g ( b w / d w ) l h = l o g ( b h / d h ) \begin{align} &l^{cx}= (b^{cx}-d^{cx})/{d^w}\\ &l^{cy}= (b^{cy}-d^{cy})/{d^h} \\ &l^w = log(b^w/d^w) \\ &l^h = log(b^h/d^h) \end{align} lcx=(bcx−dcx)/dwlcy=(bcy−dcy)/dhlw=log(bw/dw)lh=log(bh/dh)
上面这个过程为边界框的编码(encode),预测时需要反向这个过程,即进行解码(decode),从预测值 l l l 中得到边界框的真实位置 b b b。
b c x = l c x d w + d c x b c y = l c y d h + d c y b w = e x p ( l w ) d w b h = e x p ( l h ) d h \begin{align} & b^{cx} = l^{cx}d^w+d^{cx} \\ & b^{cy} = l^{cy}d^{h}+d^{cy} \\ & b^w = exp(l^w) d^w \\ & b_h = exp(l^h)d^h \end{align} bcx=lcxdw+dcxbcy=lcydh+dcybw=exp(lw)dwbh=exp(lh)dh
在实际的SSD实现中设置了variance超参数来调整检测值。通过bool参数variance_encoded_in_target来控制两种模式,当其为True时,表示variance被包含在预测值中,就是上面那种情况。但是如果是False(一般采用这种方式),就需要手动设置超参数variance通常设置为[0.1, 0.1, 0.2, 0.2],用来对 l l l 的4个值进行放缩,此时边界框的编码为
l c x = ( b c x − d c x ) / ( d w ∗ v a r i a n c e [ 0 ] ) l c y = ( b c y − d c y ) / ( d h ∗ v a r i a n c e [ 1 ] ) l w = l o g ( b w / d w ) / v a r i a n c e [ 2 ] l h = l o g ( b h / d h ) / v a r i a n c e [ 3 ] \begin{align} &l^{cx}= (b^{cx}-d^{cx})/({d^w}*variance[0])\\ &l^{cy}= (b^{cy}-d^{cy})/({d^h}*variance[1]) \\ &l^w = log(b^w/d^w)/variance[2] \\ &l^h = log(b^h/d^h)/variance[3] \end{align} lcx=(bcx−dcx)/(dw∗variance[0])lcy=(bcy−dcy)/(dh∗variance[1])lw=log(bw/dw)/variance[2]lh=log(bh/dh)/variance[3]
如上式所示,计算loss时 l c x , l c y , l w , l h l^{cx},l^{cy},l^w,l^h lcx,lcy,lw,lh 分别除以variance,这样可以增大loss,也就增加了梯度,让网络更好的学习。同理可得,此时边界框需要这样解码:
b c x = ( l c x ∗ v a r i a n c e [ 0 ] ) d w + d c x b c y = ( l c y ∗ v a r i a n c e [ 1 ] ) d h + d c y b w = e x p ( l w ∗ v a r i a n c e [ 2 ] ) d w b h = e x p ( l h ∗ v a r i a n c e [ 3 ] ) d h \begin{align} & b^{cx} = (l^{cx}*variance[0])d^w+d^{cx} \\ & b^{cy} = (l^{cy}*variance[1])d^{h}+d^{cy} \\ & b^w = exp(l^w*variance[2]) d^w \\ & b_h = exp(l^h*variance[3])d^h \end{align} bcx=(lcx∗variance[0])dw+dcxbcy=(lcy∗variance[1])dh+dcybw=exp(lw∗variance[2])dwbh=exp(lh∗variance[3])dh
综上所述,对于一个大小 m × n m \times n m×n 的特征图,共有 m n mn mn 个单元,每个单元设置的先验框数目记为 k k k ,那么每个单元共需要 ( c + 4 ) k (c+4)k (c+4)k 个预测值(每个框都有c个类别和四个定位值),所有的单元共需要 ( c + 4 ) k m n (c+4)kmn (c+4)kmn 个预测值,由于SSD采用卷积做检测,所以就需要 ( c + 4 ) k (c+4)k (c+4)k 个卷积核完成这个特征图的检测过程。
2.3 先验框scale缩放比例
SSD的整体网络结构如图2.1所示,分别使用conv4_3,Conv7,Conv8_2,Conv9_2,Conv10_2,Conv11_2作为检测所用的特征图,共提取了6个特征图,其大小分别是 ( 38 , 38 ) , ( 19 , 19 ) , ( 10 , 10 ) , ( 5 , 5 ) , ( 3 , 3 ) , ( 1 , 1 ) (38,38), (19, 19), (10, 10), (5,5), (3,3), (1,1) (38,38),(19,19),(10,10),(5,5),(3,3),(1,1) ,不同特征图上设置的先验框尺寸是不同的。先验框的设置,包括尺度(或者说大小)和长宽比两个方面。对于先验框的尺度,其遵守一个线性递增规则:随着特征图大小降低,先验框尺度线性增加。
如下图所示越往后边的特征层,它的格子数目越少,每个格子的感受野更大,也就是对应到原图的框就更大,也就是检测的物体就更大。要得到图(a)中的先验框,先通过计算不同层的缩放比获得每一特征层的基础 s k s_k sk值,然后通过不同的长宽比和 s k s_k sk计算真实的长宽应该是多少
s k s_k sk的计算如下所示
s k = s m i n + s m a x − s m i n m − 1 ( k − 1 ) , k ∈ [ 1 , m ] s_{k}\,=\,s_{m i n}\,+\,{\frac{s_{m a x}-s_{m i n}}{m-1}}\,\big(k\,-\,1\big),k\,\in\,\left[1,m\right] sk=smin+m−1smax−smin(k−1),k∈[1,m]
其中 m m m 指的特征图个数,实际为5 ,因为第一层(Conv4_3层)是单独设置的, s k s_k sk 表示先验框大小相对于图片的比例,而 s m i n s_{min} smin 和 s m a x s_{max} smax 表示比例的最小值与最大值,paper里面取0.2和0.9。对于第一个特征图,其先验框的尺度比例一般设置为 s m i n / 2 = 0.1 s_{min}/2=0.1 smin/2=0.1 那么尺度为 0.1 × 300 = 30 0.1 \times 300 = 30 0.1×300=30(此处按输入图片为300*300) 。对于后面的特征图,先验框尺度按照上面公式线性增加,但是实际上是先将尺度比例 s s s 先扩大100倍,此时增长步长为 s k + 1 − s k = ⌊ ⌊ s max × 100 ⌋ − ⌊ s min × 100 ⌋ m − 1 ⌋ = 17 s_{k+1}-s_k=\left\lfloor\frac{\left\lfloor s_{\max } \times 100\right\rfloor-\left\lfloor s_{\min } \times 100\right\rfloor}{m-1}\right\rfloor=17 sk+1−sk=⌊m−1⌊smax×100⌋−⌊smin×100⌋⌋=17(注意:方括号代表向下取整),那么 s k = 20 + 17 ( k − 1 ) s_k=20+17(k-1) sk=20+17(k−1),可以得到 s k s_k sk 的取值为 20, 37, 54, 71,88。将这些比例除以100得到真实scales列表为[0.1,0.2,0.37,0.54,0.71,0.88,1.05],这里可以发现由于取整的原因,并没有我们设定的0.9这个 s m a x s_{max} smax值。而之所以会出现第7个值1.05是为了之后计算长宽比时候的需要。然后再乘以图片大小,可以得到各个特征图的先验框尺度为[30, 60, 111, 162, 213, 264]。
2.4 先验框宽高比 aspect ratio
从图 2.3(a) 可以看出为了适应不同的目标我们需要设置不同的长宽比。每个特征层的每个格要是4个bbox,这里每个特征层里的所有框的scale(缩放比)是相同的,不同的便是他们的长宽比不同。总体上来看一共有5种长宽比,也就是aspect ratio也叫 a r a_r ar,分别为[1, 2, 0.5, 3, 1/3],对于特定的长宽比,按如下公式计算先验框的宽度与高度(注意:后文中的 s k s_k sk 均指的是先验框实际尺度,而不是尺度比例)
w k a = s k a r , h k a = s k / a r w_{k}^{a}=s_{k}\sqrt{a_{r}},\\ h_{k}^{a}=s_{k}/\sqrt{a_{r}} wka=skar,hka=sk/ar
默认情况下,每个特征图会有一个 a r = 1 a_r=1 ar=1 且尺度为 s k s_k sk 的先验框,除此之外,还会设置一个尺度为 s k ′ = s k ∗ s k + 1 s_k' = \sqrt {s_k*s_{k+1}} sk′=sk∗sk+1 且 a r = 1 a_r=1 ar=1 的先验框,这样每个特征图都设置了两个长宽比为1但大小不同的正方形先验框。注意最后一个特征图需要参考一个虚拟 s m + 1 = 300 × 1.05 = 315 s_{m+1}=300 \times 1.05=315 sm+1=300×1.05=315 计算 s m ′ s_{m}' sm′。
因此,每个特征图一共有 6 个先验框,分别是2个正方形的框和4个宽高比分别为{2,1/2,3,1/3} 的长方形框,但是在实现时,Conv4_3,Conv10_2和Conv11_2层仅使用4个先验框,它们不使用长宽比为 {3, 1/3} 的先验框。
综上2.2和2.3章节所述,当输入图大小为300*300时,得到如下结论:
- 各个特征层缩放比scale的取值分别为:
[0.1,0.2,0.37,0.54,0.71,0.88,1.05](最后一个只是为了后续计算) - 各个特征层的先验框尺度 s k = image_size ∗ scale s_k= \text {image\_size} * \text {scale} sk=image_size∗scale 分别为
[30, 60, 111, 162, 213, 264, 315](最后一个只是为了后续计算) - 每个特征层的先验框的宽高比 a r a_r ar为
[1', 1, 2, 0.5, 3, 1/3](1’是特殊 s k s_k sk的情况)
下面将以Conv4_3和Conv11_2特征图为例,计算其中6个先验框(在原图上)的尺寸, Conv4_3的先验框计算如下
- a r = 1 a_r=1 ar=1, s k ′ = s k ∗ s k + 1 = ⌊ ( 30 ∗ 60 ) ⌋ = 42 s_k'= \sqrt {s_k*s_{k+1}}=\lfloor\sqrt{(30*60)}\rfloor=42 sk′=sk∗sk+1=⌊(30∗60)⌋=42时, w = 42 ∗ 1 = 42 , h = 42 / 1 = 42 w=42*\sqrt1=42, h=42/\sqrt1=42 w=42∗1=42,h=42/1=42
- a r = 1 a_r=1 ar=1, s k = 30 s_k=30 sk=30时, w = h = 30 w=h=30 w=h=30
- a r = 0.5 a_r=0.5 ar=0.5, s k = 30 s_k=30 sk=30时, w = 30 ∗ 0.5 = 21 , h = 30 / 0.5 = 42 w=30*\sqrt{0.5}=21, h=30/\sqrt{0.5}=42 w=30∗0.5=21,h=30/0.5=42
- a r = 2 a_r=2 ar=2, s k = 30 s_k=30 sk=30时, w = 30 ∗ 2 = 42 , h = 30 / 2 = 21 w=30*\sqrt{2}=42, h=30/\sqrt{2}=21 w=30∗2=42,h=30/2=21
- a r = 1 / 3 a_r=1/3 ar=1/3, s k = 30 s_k=30 sk=30时, w = 30 ∗ 1 / 3 = 17 , h = 30 / 1 / 3 = 51 w=30*\sqrt{1/3}=17, h=30/\sqrt{1/3}=51 w=30∗1/3=17,h=30/1/3=51
- a r = 3 a_r=3 ar=3, s k = 30 s_k=30 sk=30时, w = 30 ∗ 3 = 51 , h = 30 / 3 = 17 w=30*\sqrt{3}=51, h=30/\sqrt{3}=17 w=30∗3=51,h=30/3=17
因此最后bbox的6种长宽为[[30,30],[42,42],[42,21],[21,42],[17,51],[51,17]](注意:上文已经提到过实际过程种Conv4_3特征层仅使用4个先验框,它们不使用长宽比为 {3, 1/3} 的先验框,此处还是计算了,主要是为了演示计算过程)
Conv11_2的先验框计算如下
- a r = 1 a_r=1 ar=1, s k ′ = s k ∗ s k + 1 = ⌊ ( 264 ∗ 315 ) ⌋ = 288 s_k'= \sqrt {s_k*s_{k+1}}=\lfloor\sqrt{(264*315)}\rfloor=288 sk′=sk∗sk+1=⌊(264∗315)⌋=288时, w = 288 ∗ 1 = 288 , h = 288 / 1 = 288 w=288*\sqrt1=288, h=288/\sqrt1=288 w=288∗1=288,h=288/1=288
- a r = 1 a_r=1 ar=1, s k = 264 s_k=264 sk=264时, w = h = 264 w=h=264 w=h=264
- a r = 0.5 a_r=0.5 ar=0.5, s k = 264 s_k=264 sk=264时, w = 264 ∗ 0.5 = 186 , h = 264 / 0.5 = 373 w=264*\sqrt{0.5}=186, h=264/\sqrt{0.5}=373 w=264∗0.5=186,h=264/0.5=373
- a r = 2 a_r=2 ar=2, s k = 264 s_k=264 sk=264时, w = 264 ∗ 2 = 373 , h = 264 / 2 = 186 w=264*\sqrt{2}=373, h=264/\sqrt{2}=186 w=264∗2=373,h=264/2=186
- a r = 1 / 3 a_r=1/3 ar=1/3, s k = 264 s_k=264 sk=264时, w = 264 ∗ 1 / 3 = 152 , h = 264 / 1 / 3 = 457 w=264*\sqrt{1/3}=152, h=264/\sqrt{1/3}=457 w=264∗1/3=152,h=264/1/3=457
- a r = 3 a_r=3 ar=3, s k = 264 s_k=264 sk=264时, w = 264 ∗ 3 = 457 , h = 264 / 3 = 152 w=264*\sqrt{3}=457, h=264/\sqrt{3}=152 w=264∗3=457,h=264/3=152
可以看到越到后面的检测框越大
2.5 先验框中心点
每个单元的先验框的中心点分布在各个单元的中心,即 ( i + 0.5 ∣ f k ∣ , j + 0.5 ∣ f k ∣ ) , i , j ∈ [ 0 , ∣ f k ∣ ) \left(\frac{i+0.5}{\left|f_k\right|}, \frac{j+0.5}{\left|f_k\right|}\right), i, j \in\left[0,\left|f_k\right|\right) (∣fk∣i+0.5,∣fk∣j+0.5),i,j∈[0,∣fk∣) ,其中 ∣ f k ∣ |f_k| ∣fk∣
为特征图的大小,这是特征图上的中心点,我们需要将其映射到原始图片上,这里我们使用两个参数,step和offset。
- step 相当于是不同的先验框中心点的距离, step取值为
[8, 16, 32, 64, 100, 300] - offset 相当于是左上第一个先验框的位置,其他点的位置都基于该点进行平移, offset的取值为0.5
那么特征图第一个像素点的位置对应到原图中为(0.5*8, 0.5*8)=(4, 4)。直觉上先验框的中心点应该就是映射图的相应格的中心点,所以对于conv4_3(38, 38),那么每个格的step应该四舍五入后300//38=8,在前几层step的确是这样设置的。但是我们发现在第三层开始这样计算后的值应该是30而不是32, 64应该是60,这里一个比较好的解释是首先这里的偏移量很小,一个是2一个是4,而且先验框只是一个设置的框,最后会通过lx,ly,lw,lh通过偏移再得到真实的值,所以偏差一点并没有太大的问题,同时这些值为8的倍数,在底层硬件处理上会可以得到更好的优化。而到了更大的尺寸100和300,如果还使用8的倍数,这样会让偏差过大。
综上,将特征图中的中心点映射到原图中得到的中心点坐标应该为:
( i + 0.5 ∣ f k ∣ ∗ image_size[0], j + 0.5 ∣ f k ∣ ∗ image_size[1] ) , i , j ∈ [ 0 , ∣ f k ∣ ) \left(\frac{i+0.5}{\left|f_k \right|}*\text{image\_size[0]}, \frac{j+0.5}{\left|f_k\right|}*\text{image\_size[1]}\right), i, j \in\left[0,\left|f_k\right|\right) (∣fk∣i+0.5∗image_size[0],∣fk∣j+0.5∗image_size[1]),i,j∈[0,∣fk∣)
2.6 构建先验框
通过VGG网络得到了特征图之后,需要对特征图进行卷积得到检测结果,下图给出了一个 5 × 5 5 \times 5 5×5 大小的特征图的检测过程。
其中Priorbox是根据前面介绍的生成规则得到先验框。检测值包含两个部分:类别置信度和边界框位置,各采用一次 3 × 3 3 \times 3 3×3 卷积来进行完成。由于每个先验框都会预测一个边界框,所以SSD300一共可以预测 38 ∗ 38 ∗ 4 + 19 ∗ 19 ∗ 6 + 10 ∗ 10 ∗ 6 + 5 ∗ 5 ∗ 63 ∗ 3 ∗ 4 + 1 ∗ 1 ∗ 4 = 8732 38*38*4+19*19*6+10*10*6+5*5*63*3*4+1*1*4=8732 38∗38∗4+19∗19∗6+10∗10∗6+5∗5∗63∗3∗4+1∗1∗4=8732个边界框。
| name | Out_size | Prior_box_num | Total_num |
|---|---|---|---|
| conv4_3 | 38x38 | 4 | 5776 |
| conv7(fc7) | 19x19 | 6 | 2166 |
| conv8_2 | 10x10 | 6 | 600 |
| conv9_2 | 5x5 | 6 | 150 |
| conv10_2 | 3x3 | 4 | 36 |
| conv11_2 | 1x1 | 4 | 4 |
| 8732 |
3. 训练
上文中提到过,模型的输出是先验框和真实边界框的偏移值,这一点非常重要!
3.1 先验框匹配
在训练过程中,首先要确定训练图片中的ground truth(真实边界框)与哪个先验框来进行匹配。SSD的先验框与ground truth的匹配原则主要有两点。
- 对于图片中每个ground truth,找到与其IOU最大的先验框,该先验框与其匹配,这样可以保证每个ground truth一定与某个先验框匹配。通常称与ground truth匹配的先验框为正样本,反之,若一个先验框没有与任何ground truth进行匹配,那么该先验框只能与背景匹配,就是负样本。
- 一个图片中ground truth是非常少的, 而先验框却很多,如果仅按第一个原则匹配,很多先验框会是负样本,正负样本极其不平衡,所以需要第二个原则。第二个原则是:对于剩余的未匹配先验框,若与某个ground truth的 IOU 大于某个阈值(一般是0.5),那么该先验框也与这个ground truth进行匹配。这意味着某个ground truth可能与多个先验框匹配,但是反过来却不可以,因为一个先验框只能匹配一个ground truth,如果多个ground truth与某个先验框 IOU 大于阈值,那么先验框只与IOU最大的那个ground truth进行匹配。
注意:第二个原则一定在第一个原则之后进行,仔细考虑一下这种情况,如果某个ground truth所对应最大 IOU 小于阈值,并且所匹配的先验框却与另外一个ground truth的 IOU 大于阈值,那么该先验框应该匹配前者,首先要确保某个ground truth一定有一个先验框与之匹配。但是,这种情况我觉得基本上是不存在。由于先验框很多,某个ground truth的最大 IOU 肯定大于阈值,所以可能只实施第二个原则既可以了。
3.2 困难负样本挖掘
尽管一个ground truth可以与多个先验框匹配,但是ground truth相对先验框还是太少了,所以负样本相对正样本会很多。为了保证正负样本尽量平衡,SSD采用了hard negative mining,就是对负样本进行抽样,抽样时按照置信度误差(预测背景的置信度越小,误差越大)进行降序排列,选取误差的较大的top-k作为训练的负样本,以保证正负样本比例接近1:3。
3.3 损失函数
损失函数定义为位置误差(locatization loss, loc)与置信度误差(confidence loss, conf)的加权和:
L ( x , c , l , g ) = 1 N ( L c o n f ( x , c ) + α L l o c ( x , l , g ) ) L(x,c,l,g)=\frac{1}{N}\bigl(L_{c o n f}(x,c)+\alpha L_{l o c}(x,l,g)\bigr) L(x,c,l,g)=N1(Lconf(x,c)+αLloc(x,l,g))
权重系数 α \alpha α 通过交叉验证设置为1
3.3.1 位置偏移损失
上式中 N N N 是先验框的正样本数量,其中位置误差 L l o c L_{loc} Lloc具体定义如下:
L l o c ( x , l , g ) = ∑ i ∈ p o s N ∑ m ∈ { c x , c y , w , h } x i j k s m o o t h L 1 ( l i m − g ^ j m ) L_{l o c}(x,l,g)=\sum_{i\in{\cal pos}}^N\sum_{m\in\{c x,c y,w,h\}}x_{i j}^{k}\mathrm{smooth}_{L1}(l_{i}^{m}-\hat{g}_{j}^{m}) Lloc(x,l,g)=i∈pos∑Nm∈{cx,cy,w,h}∑xijksmoothL1(lim−g^jm)
这里面
s m o o t h L 1 ( x ) = { 0.5 x 2 i f ∣ x ∣ < 1 ∣ x ∣ − 0.5 o t h e r w i s e , g ^ j c x = ( g j c x − d i c x ) / d i w g ^ j c y = ( g j c y − d i c y ) / d i h g ^ j w = log ( g j w d i w ) g ^ j h = log ( g j h d i h ) \begin{align} & \mathrm{smooth}_{L_{1}}(x)=\left\{\begin{array}{l l}{{0.5x^{2}}}&{{\mathrm{if~|}x|<1}}\\ {{|x|-0.5}}&{{\mathrm{otherwise,}}}\end{array}\right. \\ & \hat{g}_{j}^{c x}=(g_{j}^{c x}-d_{i}^{c x})/d_{i}^{w} \\ & \hat{g}_{j}^{c y}=(g_{j}^{c y}-d_{i}^{c y})/d_{i}^{h} \\ & \hat{g}_{j}^{w}=\log{\left({\frac{g_{j}^{w}}{d_{i}^{w}}}\right)} \\ & {\hat{g}}_{j}^{h}=\log\left(\frac{g_{j}^{h}}{d_{i}^{h}}\right) \\ \end{align} smoothL1(x)={0.5x2∣x∣−0.5if ∣x∣<1otherwise,g^jcx=(gjcx−dicx)/diwg^jcy=(gjcy−dicy)/dihg^jw=log(diwgjw)g^jh=log(dihgjh)
其中 x i j k ∈ { 0 , 1 } x_{ij}^k \in \{0, 1\} xijk∈{0,1} 为一个指示参数,当 x i j k = 1 x_{ij}^{k}=1 xijk=1 时表示第 i i i 个先验框与第 j j j 个ground truth匹配,并且ground truth的类别为 k k k 。 l l l 为先验框与grounding truth bbox的模型预测的偏移值。而 g g g 是ground truth的位置参数, d d d是先验框的位置参数,通过 g g g和 d d d可以算出先验框和grounding truth bbox的真实位置偏移 g ^ \hat g g^ 。即位置误差损失就是模型预测的位置偏移和真实位置偏移的 s m o o t h L 1 smooth_{L1} smoothL1损失。
由于 x i j k x_{ij}^k xijk 的存在,所以位置误差仅针对正样本进行计算。值得注意的是,要先对ground truth的
进行编码得到 g ^ \hat g g^ ,因为预测值 l l l 是在特征图上预测的,也是编码值。如上文中公式(9)到公式(12)所示,若设置了variance,编码时要加上variance,如下式所示,此处只计算了 g ^ j c x \hat{g}_{j}^{c x} g^jcx 其他三个按类似方式计算。
g ^ j c x = ( g j c x − d i c x ) / d i w / v a r i a n c e [ 0 ] \hat{g}_{j}^{c x}=(g_{j}^{c x}-d_{i}^{c x})/d_{i}^{w}/v a r i a n c e[0] g^jcx=(gjcx−dicx)/diw/variance[0]
3.3.2 置信度损失
对于置信度误差,采用了softmax loss,即一个多分类问题。
L c o n f ( x , c ) = − ∑ i ∈ P ∘ s N x i j p l o g ( c ^ i p ) − ∑ i ∈ N e g l o g ( c ^ i 0 ) w h e r e c ^ i p = exp ( c i p ) ∑ p exp ( c i p ) L_{c o n f}(x,c)=-\sum_{i\in{\cal P}\circ s}^{N}x_{i j}^{p}l o g(\hat{c}_{i}^{p})-\sum_{i\in{Neg}}l o g(\hat{c}_{i}^{0})\quad\mathrm{where}\quad\hat{c}_{i}^{p}=\frac{\exp(c_{i}^{p})}{\sum_{p}\exp(c_{i}^{p})} Lconf(x,c)=−i∈P∘s∑Nxijplog(c^ip)−i∈Neg∑log(c^i0)wherec^ip=∑pexp(cip)exp(cip)
3.4 训练部分小结
训练的总体流程如下图所示
图中的default boxes也就是我们所说的先验框,jaccard overlap 计算(Jacard重叠)其实就是 IOU 的计算,其示意图如下
SSD整体的的步骤如下:
(1)通过2.4章节所述方式构建先验框
(2)通过计算 jaccard overlap 找出与grounding truth 对应的先验框,确定正负样本
(3)计算损失,训练模型,修正模型的预测偏移值
(4)训练完毕,推理阶段,模型先预测出偏移值,然后通过公式(5)到(8)推理出目标框的位置
4. 数据增强
以上部分便是SSD的原理,通过上面的章节即可了解SSD的训练过程。在SSD中还通过数据增强来提高模型的泛化能力,此处不在将讲解,其与原理无太大关系,且与其他模型的数据增强基本一致。
了解更多AI算法(CV NLP AIGC LLM)关注 微信公众号 funNLPer
本文主要讲解SSD的原理,并未涉及代码,下一篇博文将结合人脸检测从代码中来深入来了解SSD目标检测
5. 参考
- 目标检测|SSD原理与实现-知乎
- SSD算法详解-CSDN
- SSD: Single Shot MultiBox Detector-在线ppt
- SSD Single Shot MultiBox Detector-deepsystems.io
- 大白话分析——SSD目标检测网络从训练到预测(上)
- 目标识别网络SSD:Pytorch源码分析(一)