STM32--USART串口
文章目录
- 通信接口
- 串口通信
-
- 硬件电路
- 电平标准
- 参数
- 时序
- USART
-
- 主要特性
- 框图
- 数据帧
-
- 发送器
- 波特率发生器
- SWART串口发送与接收工程
- 串口收发数据包
通信接口
通信接口是指连接中央处理器(CPU)和标准通信子系统之间的接口,用于实现数据和控制信息在不同设备之间的传输和交换。通信接口可以是硬件或软件实现,其目的是使不同设备之间能够进行有效地通信。
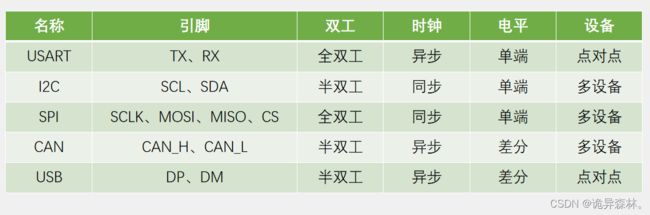
上图是常见的通用通信类型。
双工指的是接口能够实现双向数据传输,即可以同时进行发送和接收数据的功能。
半双工:数据在同一个通信信道上交替地进行双向传输,但不能同时进行发送和接收。发送方和接收方需要在不同时间段进行数据传输。
全双工:数据可以同时进行双向数据传输,发送方和接收方可以在同一时间段进行数据发送和接收。通信双方可以独立地进行发送和接收工作。
时钟是指在传输数据是否能达到同步传输。
同步传输:发送方和接收方之间使用一个共同的时钟信号来同步数据的传输。发送方根据时钟信号将数据按照固定的速率发送,接收方也按照相同的时钟信号来接收数据。
异步传输:数据的传输不依赖于共同的时钟信号,而是使用起始位、停止位和数据位之间的固定时间间隔进行同步。发送方会在发送数据之前先发送一个起始位作为同步信号,接收方通过检测起始位来确定数据的开始和结束。
电平是指传输信号时的电压信号形式。
单端传输:信号传输使用单个导线进行,信号的电压相对于某个参考电平变化来表示。这意味着信号只有一个极性,数据通过高低电平表示。在单端传输中,由于信号线未与其他导线耦合,容易受到电磁干扰的影响,可能导致信号质量的下降。
差分传输:信号的传输使用两个导线进行,信号通过两个相互补充的电压信号的差异来表示。差分传输具有很强的抗干扰能力,可以减少电磁干扰对信号的影响。
串口通信
串口是一种应用十分广泛的通讯接口,串口成本低、容易使用、通信线路简单,可实现两个设备的互相通信;适用于近距离的通信。

单片机的串口可以使单片机与单片机、单片机与电脑、单片机与各式各样的模块互相通信,极大地扩展了单片机的应用范围,增强了单片机系统的硬件实力。
硬件电路

简单双向串口通信有两根通信线(发送端TX和接收端RX)
TX与RX要交叉连接
当只需单向的数据传输时,可以只接一根通信线
当电平标准不一致时,需要加电平转换芯片
电平标准
电平标准是数据1和数据0的表达方式,是传输线缆中人为规定的电压与数据的对应关系,串口常用的电平标准有如下三种:
TTL电平:+3.3V或+5V表示1,0V表示0
RS232电平:-3~ -15V表示1,+3~ +15V表示0
RS485电平:两线压差+2~+6V表示1,-2 ~-6V表示0(差分信号)
参数
波特率:串口通信的速率,可以指定每秒传输的位数
起始位:标志一个数据帧的开始,固定为低电平
数据位:数据帧的有效载荷,1为高电平,0为低电平,低位先行
校验位:用于数据验证,根据数据位计算得来
常用奇偶校验位:通过在数据中添加一个附加位(校验位),以确保接收端可以检测到传输过程中的错误。
奇校验:如果数据位中1的个数为偶数,则校验位设置为1,使得数据位和校验位中的1的总和保持奇数。如果数据位中1的个数为奇数,那么校验位置0。
偶校验:如果数据位中1的个数为偶数,则校验位置0,使得数据位和校验位的总个数为偶数。如果数据位中1的个数为奇数,校验位置1 。
停止位:用于数据帧间隔,固定为高电平

时序

输入不同的数据,显示不同的时序。
USART
通用同步异步收发器(USART)提供了一种灵活的方法与使用工业标准NRZ异步串行数据格式的外部设备之间进行全双工数据交换。 USART利用分数波特率发生器提供宽范围的波特率选择。
主要特性
1.全双工的,异步通信
2.分数波特率发生器系统
─ 发送和接收共用的可编程波特率,最高达4.5Mbits/s
3.可编程数据字长度(8位或9位)
4.可配置的停止位-支持1或2个停止位
5.校验控制
─ 发送校验位
─ 对接收数据进行校验
6.支持同步模式、硬件流控制、DMA、智能卡、IrDA、LIN
框图
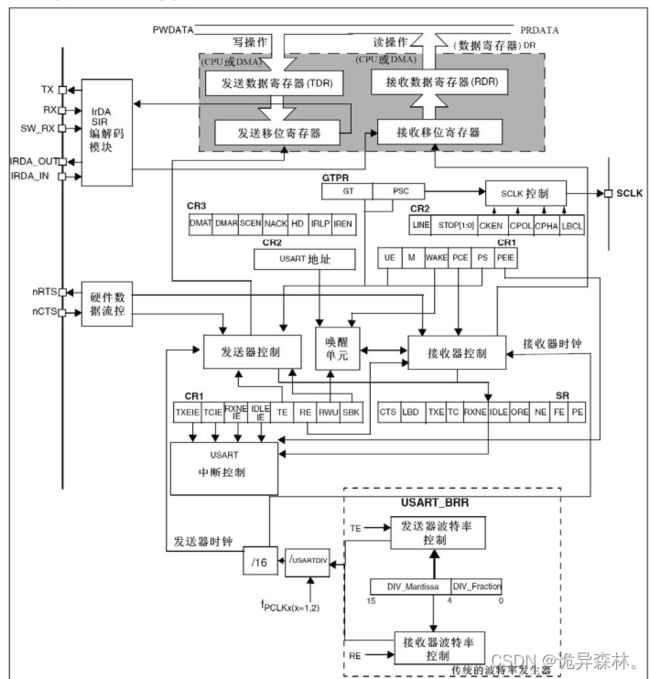
先看左上角的接口处,TX与RX就是发送和接收的引脚,下面的三个接口是智能卡和IrDA通信的引脚。
发送脚就是通过发送移位寄存器送出去的,接收脚就是将接收数据送到接收移位寄存器的。
灰色部分就是串口的数据寄存器。有两个数据寄存器,一个用来发送数据,一个用来接收数据;在程序上,只表现为一个寄存器,它们寄存器共用地址进行存储。
当你进行写入操作时,数据就写到TDR,当你进行读取操作时,数据就从RDR进行读出。
下面是移位寄存器,作用是把一个字节的数据一位一位进行位移。
假设你在某时刻给TDR写入数据0x66,在二进制存储就是01100110,此时硬件会检测到你写入的数据,就会检查移位寄存器是否有数据正在移位,如果没有01100110就会立刻放入移位寄存器中,此时也会置出一个标志位TXE,发送寄存器为空;有了这个标志我们就可以在TDR再写入一个数据了。移位寄存器在发送器控制的情况下,将数据一位一位进行传输到TX引脚进行输出(低位先出),当数据全部移位后,新的数据就会再次从TDR转移到移位寄存器中来,如果移位寄存器还没有完成,那么TDR会等移位寄存器完成移位之后才将数据转移。有了TDR和移位寄存器双重缓存,可以保证数据发送时,数据帧之间没有空闲。
而接收部分也是同样的道理,接收移位寄存器由接收器控制,低位先放到移位寄存器的高位,随着数据的增加而右移,当移位寄存器数据达到一个字节后,传输给接收寄存器RDR,此时也会有一个标志位RXNE置1,意味着接收寄存器有数据了,我们可以对DR寄存器的数据进行读走。
接着看到下面,有一个硬件数据流控,如果发送设备发送太快,接收设备来不及处理,可以通过流控来控制传输的速度。
它有两个引脚,一个是nRTS,另一个是nCTS。
nRTS是请求发送,是输出脚,就是告诉别人,我当前能不能接收;
nCTS是清除发送,是输入脚,用于接收别人nRTS的信号;
接着看右边的SCLK,这是一个产生同步的时钟信号,它是配合发送移位寄存器输出的,发送移位寄存器每发送一次,同步时钟电平就跳变一个周期,时钟会告诉对方我已经移出去一个数据了,你看要不要让我这个时钟信号来指导你接收一下?当然这个时钟只支持输出,不支持输入,所以两个SWART不能实现同步的串口通信。
主要用途是兼容别的协议或者做自适应波特率。
接着看到中间的唤醒单元,这部分的作用是实现串口挂载多个设备。
中断控制,支持对标志位标志的地方进行中断。
最下面的波特率发生器部分,其实就是分频器,对APB时钟进行分频,得到发送和接收移位的时钟。
数据帧
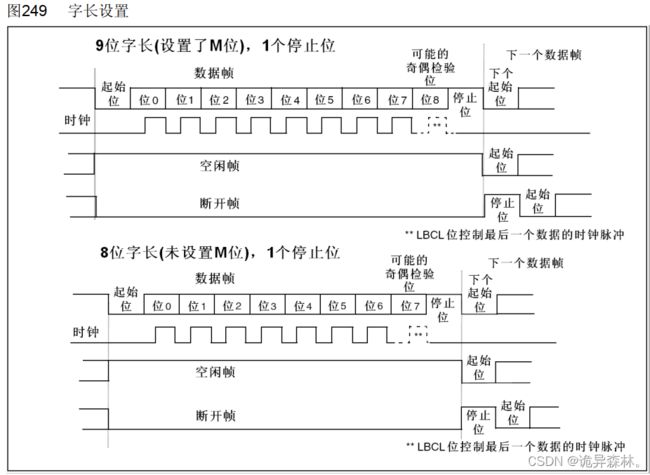
字长可以通过编程USART_CR1寄存器中的M位,选择成8或9位(见图249)。在起始位期间, TX脚处于低电平,在停止位期间处于高电平。
发送器
发送器根据M位的状态发送8位或9位的数据字。当发送使能位(TE)被设置时,发送移位寄存器中的数据在TX脚上输出,相应的时钟脉冲在CK脚上输出。
USART支持多种停止位的配置: 0.5、 1、 1.5和2个停止位。

波特率发生器
发送器和接收器的波特率由波特率寄存器BRR里的DIV确定
计算公式:波特率 = fPCLK2/1 / (16 * DIV)
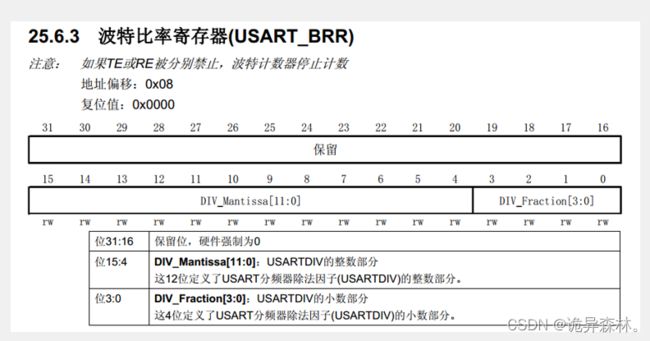
假设我们要输出波特率为9600,那么通过计算DIV=72M/16/9600=468.75
所以置于波特率寄存器中的值为468.75.
SWART串口发送与接收工程
OLED代码链接入口
接线方式:
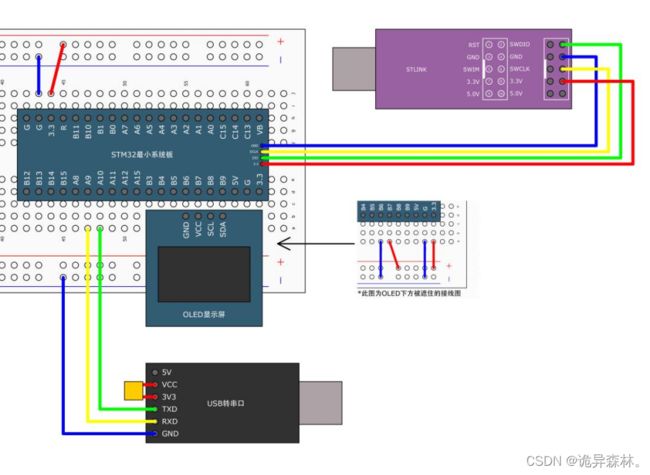
发送时需要一个串口助手在电脑来显示内容,我们将实现STM32与电脑之间的数据传输。以STM32为主机。
Serial.h
#ifndef __SERIAL_H__
#define __SERIAL_H__
#include Serial.c
#include "stm32f10x.h" // Device header
#include 初始化输出需要配置复用功能,因为SWART为片上外设。
发送字节需要用TXE标志位来表示已经从DR寄存器发送到移位寄存器中。所以用到while来进行等待;
接收时,利用RNXE产生的标志位来产生中断,在中断函数中获取DR寄存器的数据。
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Buzzer.h"
#include "Serial.h"
#include "OLED.h"
int main()
{
uint8_t Rxdata;
OLED_Init();
Serial_Init();
OLED_ShowString(1,1,"RxData:");
while(1)
{
if(Serial_GetRxFlag()==1)
{
Rxdata=Serial_GetRxData();
Serial_SendByte(Rxdata);
OLED_ShowHexNum(1,8,Rxdata,2);
}
}
}
串口收发数据包
连接方式:

利用连续的数据序列来对LED灯的亮灭进行控制;
Serial.h
#ifndef __SERIAL_H__
#define __SERIAL_H__
#include Serial.c
#include "stm32f10x.h" // Device header
#include 对于接收的数据包,利用了一种状态机的方式进行接收
通过包头和包尾对数据有效位进行保护,可以让一连串重复的数据可以找到数据位,避免找不到数据位的头的情况。

main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "Serial.h"
#include "OLED.h"
int main()
{
OLED_Init();
Serial_Init();
LED_Init();
OLED_ShowString(1, 1, "RxPacket:");
while(1)
{
if(Serial_RxFlag==1)
{
if(strcmp(Serial_RxPacket,"LED_ON")==0)
{
LED1_ON();
OLED_ShowString(2,1,"LED_ON_OK ");
Serial_SendString("LED_ON_OK");
}
else if(strcmp(Serial_RxPacket,"LED_OFF")==0)
{
LED1_OFF();
OLED_ShowString(2,1,"LED_OFF_OK ");
Serial_SendString("LED_OFF_OK");
}
else
{
OLED_ShowString(2,1,"ERROR_COMMAND");
Serial_SendString("ERROR_COMMAND");
}
Serial_RxFlag=0;
}
}
}
LED.c
#include "stm32f10x.h" // Device header
void LED_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_SetBits(GPIOA, GPIO_Pin_1 | GPIO_Pin_2);
}
void LED1_ON(void)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
}
void LED1_OFF(void)
{
GPIO_SetBits(GPIOA, GPIO_Pin_1);
}
void LED1_Turn(void)
{
if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_1) == 0)
{
GPIO_SetBits(GPIOA, GPIO_Pin_1);
}
else
{
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
}
}
void LED2_ON(void)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_2);
}
void LED2_OFF(void)
{
GPIO_SetBits(GPIOA, GPIO_Pin_2);
}
void LED2_Turn(void)
{
if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_2) == 0)
{
GPIO_SetBits(GPIOA, GPIO_Pin_2);
}
else
{
GPIO_ResetBits(GPIOA, GPIO_Pin_2);
}
}
LED.h
#ifndef __LED_H__
#define __LED_H__
void LED_Init();
void LED1_ON();
void LED1_OFF();
void LED1_Turn();
void LED2_ON();
void LED2_OFF();
void LED2_Turn();
#endif