运动物体的边缘检测
运动物体的边缘检测
1.开发工具
Python版本:Anaconda 的python环境3.8版本
开发软件:Pycharm社区版
识别模型:普通学习模型
相关模块:Anaconda自带模块,opencv-python=3.4.8.29模块
2.环境搭建
安装Anaconda并将路径添加到环境变量,安装Pycharm并将路径添加到环境变量,使用pip安装需要的相关模块即可。
3.原理介绍
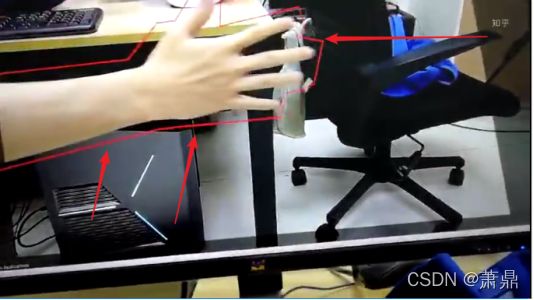
利用固定摄像头拍摄的实时视频,框出移动物体的轮廓(即FrogEyes蛙眼移动物体侦测),首先将摄像头里的想要识别的区域圈出,然后在其检测区域只要物体有运动趋势,则可以检测出运动物体的边缘部分,然后将边缘框出,形成一个移动物体的边缘检测识别。
4.程序流程
(一)首先创建一个类,该类是用于前期你们圈出你们想检测的区域的代码,可以选定部分区域进行移动物体的边缘检测
(二)再创建一个一个蛙眼类,作用就是将视频里面的移动物体进行边缘检测再圈出,实现移动物体的边缘检测
(三)差值提取的核心代码,计算得出轮廓的核心代码
(四)定义两个函数,使其将视频读取并且在电脑上展示

(五)源代码展示
import multiprocessing as mp
import cv2
import numpy as np
import os
class DrawROI(object): # draw Region of Interest
def __init__(self, img):
self.img = img
self.window_name = self.__class__.__name__
self.done = False
self.cur_pt = (0, 0) # Current position, so we can draw the line-in-progress
self.roi_pts = [] # List of points defining our polygon
self.roi_pts_pwd = "%s_points.npy" % self.__class__.__name__
def on_mouse(self, event, x, y, _buttons, _user_param):
if self.done: # Nothing more to do
return
if event == cv2.EVENT_MOUSEMOVE:
# We want to be able to draw the line-in-progress, so update current mouse position
self.cur_pt = (x, y)
elif event == cv2.EVENT_LBUTTONDOWN:
# Left click means adding a point at current position to the list of points
print("Adding point #%d with position(%d,%d)" % (len(self.roi_pts), x, y))
self.roi_pts.append((x, y))
elif event == cv2.EVENT_RBUTTONDOWN:
# Right click means we're done
print("Completing polygon with %d points." % len(self.roi_pts))
self.done = True
def confirm(self, img):
roi_mat = cv2.fillPoly(np.zeros(img.shape, dtype=np.uint8), self.roi_pts, (1, 1, 1))
high_light_roi_mat = np.ones(roi_mat.shape, dtype=np.float) * 0.5
high_light_roi_mat = cv2.fillPoly(high_light_roi_mat, self.roi_pts, (1.0, 1.0, 1.0)) # highlight the roi
canvas = np.copy(img)
canvas = canvas * high_light_roi_mat
canvas = np.array(canvas, dtype=np.uint8)
cv2.imshow(self.window_name, canvas)
while os.path.exists(self.roi_pts_pwd):
wait_key = cv2.waitKey(50)
if wait_key == 13:
self.done = True
break
elif wait_key == 8: # ord('\b'), Backspace
os.remove(self.roi_pts_pwd) # delete the *.npy and redraw
self.roi_pts = [] # initialize the pts
self.done = False
def draw_roi(self, line_color=(234, 234, 234)):
img = self.img
roi_mat = np.zeros(img.shape, dtype=np.uint8) # Region of Image(ROI)
cv2.namedWindow(self.window_name, flags=cv2.WINDOW_FREERATIO)
cv2.imshow(self.window_name, img)
cv2.waitKey(1)
cv2.setMouseCallback(self.window_name, self.on_mouse)
canvas = np.copy(img)
canvas_cur = canvas
pre_pts_len = len(self.roi_pts) # previous points of polygon number
if os.path.exists(self.roi_pts_pwd):
self.roi_pts = np.load(self.roi_pts_pwd)
self.confirm(img)
while not self.done:
if len(self.roi_pts) != pre_pts_len:
pre_pts_len = len(self.roi_pts)
cv2.line(canvas_cur, self.roi_pts[-1], self.cur_pt, line_color, 2)
canvas = canvas_cur
else:
canvas_cur = np.copy(canvas)
if len(self.roi_pts) > 0:
cv2.line(canvas_cur, self.roi_pts[-1], self.cur_pt, line_color, 2)
cv2.imshow(self.window_name, canvas_cur) # Update the window
if cv2.waitKey(50) == 13: # ENTER hit, ord('\r') == 13
self.roi_pts = np.array([self.roi_pts])
roi_mat = cv2.fillPoly(roi_mat, self.roi_pts, (1, 1, 1))
print(self.roi_pts_pwd)
np.save(self.roi_pts_pwd, self.roi_pts)
self.confirm(img)
cv2.destroyWindow(self.window_name)
return self.roi_pts
class EdgeDetection(object): # FrogEyes
def __init__(self, img, roi_pts):
self.min_thresh = 56.0
self.roi_pts = roi_pts
self.roi_mat = cv2.fillPoly(np.zeros(img.shape, dtype=np.uint8), self.roi_pts, (1, 1, 1))
img = self.img_preprocessing(img)
background_change_after_read_image_number = 64 # change time = 0.04*number = 2.7 = 0.4*64
self.img_list = [img for _ in range(background_change_after_read_image_number)]
self.high_light_roi_mat = cv2.fillPoly(np.ones(self.roi_mat.shape, dtype=np.float) * 0.25,
self.roi_pts, (1.0, 1.0, 1.0), ) # highlight the roi
self.img_len0 = int(360)
self.img_len1 = int(self.img_len0 / (img.shape[0] / img.shape[1]))
self.img_back = self.img_preprocessing(img) # background
self.min_side_num = 3
self.min_side_len = int(self.img_len0 / 24) # min side len of polygon
self.min_poly_len = int(self.img_len0 / 12)
self.thresh_blur = int(self.img_len0 / 8)
def img_preprocessing(self, img):
img = np.copy(img)
img *= self.roi_mat
# img = cv2.resize(img, (self.img_len1, self.img_len0))
# img = cv2.bilateralFilter(img, d=3, sigmaColor=16, sigmaSpace=32)
return img
def get_polygon_contours(self, img, img_back):
# img = np.copy(img)
dif = np.array(img, dtype=np.int16)
dif = np.abs(dif - img_back)
dif = np.array(dif, dtype=np.uint8) # get different
gray = cv2.cvtColor(dif, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, self.min_thresh, 255, 0)
thresh = cv2.blur(thresh, (self.thresh_blur, self.thresh_blur))
if np.max(thresh) == 0: # have not different
contours = []
else:
thresh, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# hulls = [cv2.convexHull(cnt) for cnt, hie in zip(contours, hierarchy[0]) if hie[2] == -1]
# hulls = [hull for hull in hulls if cv2.arcLength(hull, True) > self.min_hull_len]
# contours = hulls
approxs = [cv2.approxPolyDP(cnt, self.min_side_len, True) for cnt in contours]
approxs = [approx for approx in approxs
if len(approx) > self.min_side_num and cv2.arcLength(approx, True) > self.min_poly_len]
contours = approxs
return contours
def main_get_img_show(self, origin_img):
img = self.img_preprocessing(origin_img)
contours = self.get_polygon_contours(img, self.img_back)
self.img_list.append(img)
img_prev = self.img_list.pop(0)
self.img_back = img \
if not contours or not self.get_polygon_contours(img, img_prev) \
else self.img_back
show_img = np.array(self.high_light_roi_mat * origin_img, dtype=np.uint8)
show_img = cv2.polylines(show_img, contours, True, (0, 0, 255), 2) if contours else show_img
return show_img
def queue_img_put(q, name, pwd, ip, channel=1):
cap = cv2.VideoCapture("1.mp4")
while True:
# print("2222222222222")
is_opened, frame = cap.read()
q.put(frame) if is_opened else None
# q.get() if q.qsize() > 1 else None
def queue_img_get(q, window_name):
frame = q.get()
region_of_interest_pts = DrawROI(frame).draw_roi()
cv2.namedWindow(window_name, flags=cv2.WINDOW_FREERATIO)
frog_eye = EdgeDetection(frame, region_of_interest_pts)
while True:
print("11111111")
frame = q.get()
img_show = frog_eye.main_get_img_show(frame)
cv2.imshow(window_name, img_show)
cv2.waitKey(1)
def run():
user_name, user_pwd, camera_ip = "admin", "password", "192.168.1.164"
# mp.set_start_method(method='spawn') # multi-processing init
queue = mp.Queue(maxsize=2)
processes = [mp.Process(target=queue_img_put, args=(queue, user_name, user_pwd, camera_ip)),
mp.Process(target=queue_img_get, args=(queue, camera_ip))]
[setattr(process, "daemon", True) for process in processes] # process.daemon = True
[process.start() for process in processes]
[process.join() for process in processes]
if __name__ == '__main__':
run()
(六)定义最后一个run()函数,使读取的视频能够正确的进行移动物体的边缘检测
(六)运行实例

5.注意事项
Oopencv-python版本一定要4.0以下,不然程序会报错。