简述几种图像增强的算法
1、几种经典的图像增强算法
1.1、Retinex
简单来说,直方图均衡化采用的方法是将图像中像素点的直流分量都去掉,只剩下交流分量,然后对交流分量进行归一化、拉伸或者直接输出。
原理:
输入图像由照度分量和反射分量两部分组成,即:
![]()
其中,L为亮度分量,描述照明,变化缓慢,处于低频部分;R为反射分量,描述景物细节,变化较快,处于高频部分。
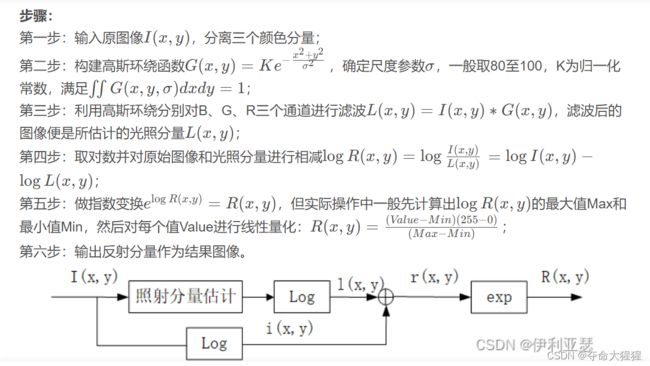
Retinex算法对图像的处理目的就是从图像I中获取反射分量R。算法流程如下:

发展:
Retinex算法理论有两个经典算法:基于路径的Retinex以及基于中心环绕Retinex。基于中心环绕Retinex又从单尺度(Single Scale Retinex)到多尺度(Multi Scale Retinex),再发展至带有色彩恢复的多尺度(Multi Scale Retinex with Color Restoration)以及其他更多的改进。在此只学习基于中心环绕的一个典型算法。
单尺度算法(SSR)
1.2、直方图均衡化
简单来说,直方图算法来做图像增强是利用了将图像中像素点的直流分量补齐。使得灰度值低的像素点的亮度提高。
直方图的概念
对一幅灰度图像,其直方图反映了该图像中不同灰度级出现的统计情况。图2给出了一个直方图的示例,其中图(a)是一幅图像,其灰度直方图可表示为图(b),其中横轴表示图像的各灰度级,纵轴表示图像中各灰度级像素的个数。(需要注意,灰度直方图表示了在图像中各个单独灰度级的分布,而图像对比度则取决于相邻近像素之间灰度级的关系。)

直方图均衡化是一种简单有效的图像增强技术,通过改变图像的直方图来改变图像中各像素的灰度,主要用于增强动态范围偏小的图像的对比度。原始图像由于其灰度分布可能集中在较窄的区间,造成图像不够清晰。例如,过曝光图像的灰度级集中在高亮度范围内,而曝光不足将使图像灰度级集中在低亮度范围内。采用直方图均衡化,可以把原始图像的直方图变换为均匀分布(均衡)的形式,这样就增加了像素之间灰度值差别的动态范围,从而达到增强图像整体对比度的效果。换言之,直方图均衡化的基本原理是:对在图像中像素个数多的灰度值(即对画面起主要作用的灰度值)进行展宽,而对像素个数少的灰度值(即对画面不起主要作用的灰度值)进行归并,从而增大对比度,使图像清晰,达到增强的目的。举个例子,如图1所示,左图为原始图像,右图为直方图均衡化后的图像。
—
1.3、PDE
2、几种基于经典算法改进的新图像增强算法
2.1受 Retinex 启发的展开与合作先验架构搜索的弱光图像增强
原文:《Retinex-inspired Unrolling with Cooperative Prior Architecture Search
for Low-light Image Enhancement》
:https://arxiv.org/pdf/2012.05609v1.pdf
这篇文章借鉴了Retinex的思想,用一个CNN来代替传统Retinex里的光照图估计。

图一 传统Retinex结构图

图二 用CNN网络代替传统光照图估计模块
又借鉴了这样的思想设计了一个去噪模块。
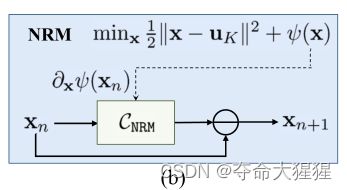
图三 去噪模块
CNN网络的示意图如下图所示 。候选操作包括 1×1 和 3×3 卷积(1-C 和 3-C),1×1 和 3×3 残差卷积(1-RC 和 3-RC),3×3 扩张卷积,扩张率为2 (3-2-DC),3×3 Residual Dilation Convolution with dilation rate of 2 (3-2-RDC), and Skip Connection (SC)。
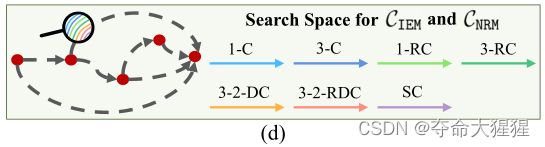
图四 CNN网络
整体网络结构:
Network(
(_criterion): LossFunction(
(l2_loss): MSELoss()
(smooth_loss): SmoothLoss()
)
(_denoise_criterion): DenoiseLossFunction(
(l2_loss): MSELoss()
(smooth_loss): SmoothLoss()
(tv_loss): TVLoss()
)
(enhance_net): EnhanceNetwork(
(iems): ModuleList(
(0): IEM(
(cell): SearchBlock(
(c1_d): Identity()
(c1_r): ResBlock(
(op): Conv2d(3, 3, kernel_size=(1, 1), stride=(1, 1))
)
(c2_d): ResBlock(
(op): Conv2d(3, 3, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2))
)
(c2_r): ConvBlock(
(op): Conv2d(3, 3, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
(c3_d): ConvBlock(
(op): Conv2d(3, 3, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
(c3_r): Identity()
(c4): ConvBlock(
(op): Conv2d(3, 3, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
(act): LeakyReLU(negative_slope=0.05)
(c5): Conv2d(12, 3, kernel_size=(1, 1), stride=(1, 1))
)
(activate): Sigmoid()
)
(1): IEM(
(cell): SearchBlock(
(c1_d): Identity()
(c1_r): ResBlock(
(op): Conv2d(3, 3, kernel_size=(1, 1), stride=(1, 1))
)
(c2_d): ResBlock(
(op): Conv2d(3, 3, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2))
)
(c2_r): ConvBlock(
(op): Conv2d(3, 3, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
(c3_d): ConvBlock(
(op): Conv2d(3, 3, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
(c3_r): Identity()
(c4): ConvBlock(
(op): Conv2d(3, 3, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
(act): LeakyReLU(negative_slope=0.05)
(c5): Conv2d(12, 3, kernel_size=(1, 1), stride=(1, 1))
)
(activate): Sigmoid()
)
(2): IEM(
(cell): SearchBlock(
(c1_d): Identity()
(c1_r): ResBlock(
(op): Conv2d(3, 3, kernel_size=(1, 1), stride=(1, 1))
)
(c2_d): ResBlock(
(op): Conv2d(3, 3, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2))
)
(c2_r): ConvBlock(
(op): Conv2d(3, 3, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
(c3_d): ConvBlock(
(op): Conv2d(3, 3, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
(c3_r): Identity()
(c4): ConvBlock(
(op): Conv2d(3, 3, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
(act): LeakyReLU(negative_slope=0.05)
(c5): Conv2d(12, 3, kernel_size=(1, 1), stride=(1, 1))
)
(activate): Sigmoid()
)
)
)
(denoise_net): DenoiseNetwork(
(stem): Conv2d(3, 6, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(nrms): ModuleList(
(0): SearchBlock(
(c1_d): ResBlock(
(op): Conv2d(6, 6, kernel_size=(1, 1), stride=(1, 1))
)
(c1_r): ResBlock(
(op): Conv2d(6, 6, kernel_size=(1, 1), stride=(1, 1))
)
(c2_d): ResBlock(
(op): Conv2d(6, 6, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2))
)
(c2_r): Identity()
(c3_d): ResBlock(
(op): Conv2d(6, 6, kernel_size=(1, 1), stride=(1, 1))
)
(c3_r): ResBlock(
(op): Conv2d(6, 6, kernel_size=(1, 1), stride=(1, 1))
)
(c4): Identity()
(act): LeakyReLU(negative_slope=0.05)
(c5): Conv2d(24, 6, kernel_size=(1, 1), stride=(1, 1))
)
(1): SearchBlock(
(c1_d): ResBlock(
(op): Conv2d(6, 6, kernel_size=(1, 1), stride=(1, 1))
)
(c1_r): ResBlock(
(op): Conv2d(6, 6, kernel_size=(1, 1), stride=(1, 1))
)
(c2_d): ResBlock(
(op): Conv2d(6, 6, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2))
)
(c2_r): Identity()
(c3_d): ResBlock(
(op): Conv2d(6, 6, kernel_size=(1, 1), stride=(1, 1))
)
(c3_r): ResBlock(
(op): Conv2d(6, 6, kernel_size=(1, 1), stride=(1, 1))
)
(c4): Identity()
(act): LeakyReLU(negative_slope=0.05)
(c5): Conv2d(24, 6, kernel_size=(1, 1), stride=(1, 1))
)
(2): SearchBlock(
(c1_d): ResBlock(
(op): Conv2d(6, 6, kernel_size=(1, 1), stride=(1, 1))
)
(c1_r): ResBlock(
(op): Conv2d(6, 6, kernel_size=(1, 1), stride=(1, 1))
)
(c2_d): ResBlock(
(op): Conv2d(6, 6, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2))
)
(c2_r): Identity()
(c3_d): ResBlock(
(op): Conv2d(6, 6, kernel_size=(1, 1), stride=(1, 1))
)
(c3_r): ResBlock(
(op): Conv2d(6, 6, kernel_size=(1, 1), stride=(1, 1))
)
(c4): Identity()
(act): LeakyReLU(negative_slope=0.05)
(c5): Conv2d(24, 6, kernel_size=(1, 1), stride=(1, 1))
)
)
(activate): Sequential(
(0): Conv2d(6, 3, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
)
)
2.2双边直方图均衡化
相关论文:'BILATERAL HISTOGRAM EQUALIZATION FOR X-RAY IMAGE TONE MAPPING'
:Bilateral Histogram Equalization for X-Ray Image Tone Mapping | IEEE Conference Publication | IEEE Xplore
参考文献:
————————————————
版权声明:Retinex部分为CSDN博主「伊利亚瑟」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_42985978/article/details/127035841
———————————————
版权声明:本文为CSDN博主「桂哥317」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_15971883/article/details/88699218