线性代数基础
本文目录
- 1. 线性代数的意义
- 2. 基本概念
- 3. Pytorch中的运算
-
- 3.1 标量
- 3.2 向量
- 3.3 长度、维度和形状
- 3.4 矩阵
- 3.5 张量
- 3.6 降维
- 3.7 点积
- 3.8 矩阵-矩阵乘法
- 3.9 范数
1. 线性代数的意义
- 线性代数提供了⼀种看待世界的抽象视角:万事万物都可以被抽象成某些特征的组合,并在由预置规则定义的框架之下以静态和动态的方式加以观察。
- 是现代数学和以现代数学作为主要分析方法的众多学科的基础。从量子力学到图像处理都离不开向量和矩阵的使用。
- 线性代数是用虚拟数字世界表示真实物理世界的工具。
- 线性代数的本质在于将具体事物抽象为数学对象,并描述其静态和动态的特性;
2. 基本概念
集合:元素常常有共性
标量(scalar):一个标量 a 可以是整数、实数或复数。零维数组(即只有单纯的一个数)。
向量(vector):多个标量a1,a2,⋯,an按一定顺序组成一个序列。一维数组,向量的实质是 n 维线性空间中的静止点;shape=(1,n)
矩阵(matrix):将向量的所有标量都替换成相同规格的向量。二维数组;shape=(m,n)
张量(tensor):矩阵中的每个标量元素再替换为向量。高阶的矩阵。三维或者n维等高维数组。;shape=(a1,a2…,an)
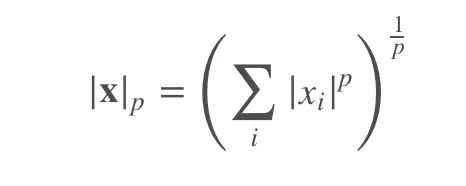
范数(norm):对单个向量大小的度量,描述的是向量自身的性质,其作用是将向量映射为一个非负的数值。对⼀个给定向量, L 1 {L_1} L1 范数计算的是向量所有元素绝对值的和, L 2 {L_2} L2 范数计算的是通常意义上的向量长度, L ∞ {L_∞} L∞ 范数计算的则是向量中最大元素的取值。通用的 L p {L ^ p} Lp 范数定义如下:
内积(inner product):计算两个向量之间的关系,对应元素乘积的求和。两个向量a = [a1, a2,…, an]和b = [b1, b2,…, bn]的点积定义为:a·b=a1b1+a2b2+……+anbn。内积能够表示两个向量之间的相对位置,即向量之间的夹角。一种特殊的情况是内积为 0,即(x,y)=0.在二维空间上,这意味着两个向量的夹角为 90 度,即相互垂直。而在高维空间上,这种关系被称为正交(orthogonality)。如果两个向量正交,说明他们线性无关,相互独立,互不影响。
线性空间(linear space):一个集合的元素具有相同维数的向量(可以是有限个或无限个), 并且定义了加法和数乘等结构化的运算.
在线性空间中,任意一个向量代表的都是 n 维空间中的一个点;反过来, 空间中的任意点也都可以唯一地用一个向量表示。
内积空间(inner product space):定义了内积运算的线性空间。
正交基(orthogonal basis):在内积空间中,一组两两正交的向量构成这个空间的正交基。 正交基的作用就是给内积空间定义出经纬度。⼀旦描述内积空间的正交基确定了,向量和点之间的对应关系也就随之确定。描述内积空间的正交基并不唯一。对二维空间来说,平面直角坐标系和极坐标系就对应了两组不同的正交基,也代表了两种实用的描述方式。
标准正交基(orthonormal basis):正交基中基向量的 L 2 {L_2} L2范数都是单位长度 1。
线性变换(linear transformation):线性变换描述了向量或者作为参考系的坐标系的变化,可以用矩阵表示。线性空间的一个重要特征是能够承载变化。当作为参考系的标准正交基确定后,空间中的点就可以用向量表示。当这个点从一个位置移动到另一个位置时,描述它的向量也会发生改变。在线性空间中,变化的实现有两种方式:一是点本身的变化,二是参考系的变化。在第一种方式中,使某个点发生变化的方法是用代表变化的矩阵乘以代表对象的向量。可是反过来,如果保持点不变,而是换一种观察的角度,得到的也将是不同的结果。
矩阵的作用就是对正交基进行变换。因此,对于矩阵和向量的相乘,就存在不同的解读方式:Ax = y。向量 x 经过矩阵 A 所描述的变换,变成了向量 y;也可以理解为一个对象在坐标系 A 的度量下得到的结果为向量 x,在标准坐标系(单位矩阵:主对角线元素为 1,其余元素为 0)的度量下得到的结果为向量 y。这表示矩阵不仅能够描述变化,也可以描述参考系本身。表达式 Ax 就相当于对向量 x 做了一个环境声明,用于度量它的参考系是 A。如果想用其他的参考系做度量的话,就要重新声明。而对坐标系施加变换的方法,就是让表示原始坐标系的矩阵与表示变换的矩阵相乘。
特征值(eigenvalue):表示了变化的速度
特征向量(eigenvector):表示变化的方向
对于Ax = λx。其效果通常是对原始向量同时施加方向变化和尺度变化。有些特殊的向量,矩阵的作用只有尺度变化而没有方向变化,也就是只有伸缩的效果而没有旋转的效果。对于给定的矩阵来说,这类特殊的向量就是矩阵的特征向量,特征向量的尺度变化系数就是特征值。
特征值分解:求解给定矩阵的特征值和特征向量的过程。但能够进行特征值分解的矩阵必须是 n 维方阵。
奇异值分解:将特征值分解算法推广到所有矩阵之上。
3. Pytorch中的运算
3.1 标量
标量由只有一个元素的张量表示。下面代码,我们实例化了两个标量,并使用它们执行一些熟悉的算数运算,即加法、乘法、除法和指数。零维数组(即只有单纯的一个数)
import torch
x = torch.tensor([3.0])
y = torch.tensor([2.0])
x + y, x * y, x / y, x ** y
输出:
tensor([5]), tensor([6]), tensor([1.5]), tensor([9])
3.2 向量
向量是标量值组成的列表,我们将这些标量值称为向量的元素或分量。在数学表示法中,我们通常将向量记为粗体、小写的符号(例如, x 、 y 和 z {x、 y和 z } x、y和z)一维数组
x = torch.arange(4)
输出:
tensor([0, 1, 2, 3])
大量文献认为列向量是向量的默认方向。在数学中,向量 $x $可以写为:
我们可以通过张量的索引来访问任一元素:
x[3]
OutPut:
tensor(3)
3.3 长度、维度和形状
向量的长度通常称为向量的维度。与普通的Python数组一样,我们可以通过调用Python的内置len()函数来访问张量的长度。
len(x)
输出:
4
当用张量表示一个向量(只有一个轴)时,我们也可以通过.shape属性访问向量的长度。形状(shape)是一个元组,列出了张量沿每个轴的长度(维数)。对于只有一个轴的张量,形状只有一个元素。
x.shape
输出:
torch.Size([4])
注意,维度(dimension)这个词在不同上下文时往往会有不同的含义。向量或轴的维度被用来表示向量或轴的长度,即向量或轴的元素数量。然而,张量的维度用来表示张量具有的轴数。在这个意义上,张量的某个轴的维数就是这个轴的长度。
3.4 矩阵
向量将标量从零阶推广到了一阶,矩阵将向量从一阶推广到了二阶。矩阵,通常用大写字母来表示(例如,X、Y和Z),在代码中表示为具有两个轴的张量。在数学表示法中,我们使用 A ∈ R m × n {A∈R^{m\times n}} A∈Rm×n来表示矩阵A,其由m行和n列的实值标量组成。直观地,我们可以将任意矩阵 A ∈ R m × n {A∈R^{m\times n}} A∈Rm×n视为一个表格。二维数组

当矩阵具有相同数量的行和列时,其形状将变为正方形;因此,它被称为方矩阵。
当调用函数来实例化张量时,我们可以通过指定两个分量m和n来创建一个形状为 m×n的矩阵。
A = torch.arange(20).reshape(5, 4)
输出:
tensor([[0, 1, 2, 3],
[4, 5, 6, 7],
[8, 9, 10, 11],
[12, 13, 14, 15],
[16, 17, 18, 19]])
当我们交换矩阵的行和列时,结果称为矩阵的转置。我们用 A T {A^T} AT来表示矩阵 A {A} A的转置。现在我们在代码中访问矩阵的转置。
A.T
输出:
tensor([[0, 4, 8, 12, 16],
[1, 5, 9, 13, 17],
[2, 6, 10, 14, 18],
[3, 7, 11, 15, 19]])
矩阵是有用的数据结构:它们允许我们组织具有不同变化模式的数据。例如,我们矩阵中的行可能对应于不同的房屋(数据样本),而列可能对应于不同的属性。因此,尽管单个向量的默认方向是列向量,但在表示表格数据集的矩阵中,将每个数据样本作为矩阵中的行向量更为常见。
3.5 张量
张量为我们提供了描述具有任意数量轴的 n 维数组的通用方法。高阶的矩阵
当我们开始处理图像时,张量将变得更加重要,图像以 3 维数组形式出现,其中3个轴对应于高度、宽度以及一个通道(channel)轴,用于堆叠颜色通道(红色、绿色和蓝色)。现在,我们将跳过高阶张量,集中在基础知识上。
X = torch.arange(24).reshape(2, 3, 4)
输出:
tensor([[[0, 1, 2, 3],
[4, 5, 6, 7],
[8, 9, 10, 11]],
[[12, 13, 14, 15],
[16, 17, 18, 19],
[20, 21, 22, 23]]])
任何按元素的一元运算都不会改变其操作数的形状。同样,给定具有相同形状的任意两个张量,任何按元素二元运算的结果都将是相同形状的张量。例如,将两个相同形状的矩阵相加会在这两个矩阵上执行元素的加法。
A = torch.arange(20, dtype=torch.float32).reshape(5,4)
B = A.clone
A, A + B
输出:
tensor([[0, 1, 2, 3],
[4, 5, 6, 7],
[8, 9, 10, 11],
[12, 13, 14, 15],
[16, 17, 18, 19]]),
tensor([[0, 2, 4, 6],
[8, 10, 12, 14],
[16, 18, 20, 22],
[24, 26, 28, 30],
[32, 34, 36, 38]])
两个矩阵按元素乘法称为哈达玛积。
A * B
输出:
tensor([[0, 1, 4, 9],
[16, 25, 36, 49],
[64, 81, 100, 121],
[144, 169, 196, 225],
[256, 289, 324, 361]])
将张量乘以或加上一个标量不会改变张量的形状,其中张量的每个元素都将与标量相加或相乘。
3.6 降维
我们可以对任意张量进行一个有用的操作是计算其元素的和。在代码中,我们可以调用计算求和的函数:
x = torch.arange(4, dtype = torch.float32)
x.sum()
输出:
tensor(6)
默认的情况下,调用求和函数会沿所有的轴降低张量的维度,使它变为一个标量。我们还可以指定张量沿哪一个轴来通过求和降低维度。以矩阵为例,为了通过求和所有行的元素来降维(轴0),我们可以在调用函数时指定axis = 0。由于输入矩阵沿着0轴降维以生成输出张量,因此输入的轴0的维数在输出形状中丢失。
A.shape
torch.Size([5, 4])
A_sum_axis0 =A.sum(axis =0)
A_sum_axis0, A_sum_axis0.shape
输出:
tensor([40, 45, 50, 55]), torch.Size([4])
指定axis = 1将通过汇总所有列的元素降维(轴1)。因此,输入的轴1的维数在输出形状中消失。
A_sum_axis1 = A.sum(axis = 1)
A_sum_axis1, A_sum_axis1.shape
输出:
tensor([6, 22, 38, 54, 70]), torch.Size([5])
沿着行和列对矩阵求和,等价于对矩阵的所有元素进行求和。
A.sum(axis=[0, 1])
输出:
tensor(190)
一个与求和相关的量是平均值。在代码中,我们可以调用函数来计算任意形状张量的平均值。
A.mean()
同样,计算平均值的函数也可以沿指定轴降低张量的维度。
A.mean(axis = 0)
3.7 点积
最基本的操作是点积。给定两个向量,点积是它们相同位置的按元素乘积的和。
y = torch.ones(4, dtype = torch.float32)
x, y, torch.dot(x, y)
输出:
tensor([0, 1, 2, 3]), tensor([1, 1, 1, 1]), tensor(6)
3.8 矩阵-矩阵乘法
在下面的代码中,我们在A和B上执行矩阵乘法。这里的A是一个5行4列的矩阵,B是一个4行3列的矩阵。相乘后,我们得到一个5行3列的矩阵。A、B矩阵做乘法的要求为:A的列数等于B的行数。做乘法以后新的矩阵的形状为(A的行数,B的列数)
B = torch.ones(4, 3)
torch.mm(A, B)
3.9 范数
线性代数中最有用的一些运算符是范数。非正式地说,一个向量的范数告诉我们一个向量有多大。这里考虑的大小(size)概念不涉及维度,而是分量的大小。
在线性代数中,向量范数是将向量映射到标量的函数 f 。向量范数要满足一些属性。给定任意向量 x ,
第一个性质来说,如果我们按常数因子 α 缩放向量的所有元素,其范数也会按相同常数因子的绝对值缩放:
f ( α x ) = ∣ α ∣ f ( x ) f ( \alpha x ) = |\alpha| f ( { \bf x } ) f(αx)=∣α∣f(x)
第二个性质是我们熟悉的三角不等式:
f ( x + y ) < = f ( x ) + f ( y ) f ( { \bf x + y }) <= f ( { \bf x } ) + f ( { \bf y } ) f(x+y)<=f(x)+f(y)
第三个性质简单地说范数必须是非负的:
f ( X ) > = 0 f ( { X } ) >= 0 f(X)>=0
最后一个性质要求范数最小为0,当且仅当向量全由0组成:
∀ i , [ x ] i = 0 < = > f ( x ) = 0 \forall i , [ x ] _ { i } = 0 \, <=>\, f ( { \bf x } ) = \, 0 ∀i,[x]i=0<=>f(x)=0
可能在这里会注意到,范数听起来很像距离的度量。事实上,欧几里得距离是一个范数:具体而言,它是L2范数。在代码中,我们可以按如下方式计算向量L2的范数。
u = torch.tensor([3, 4])
torch.norm(u)
在深度学习中,我们更经常地使用L2范数的平方。我们还会经常遇到L1范数,它表示为向量元素的绝对值之和:
x ∣ 1 = ∑ i = 1 n ∣ x i ∣ { \bf x } | _ { 1 } = \sum _ { i = 1 } ^ { n } { } |{ x } { } _ { i }| x∣1=i=1∑n∣xi∣
与L2范数相比,L1范数受异常值的影响较小。为了计算L1范数,我们将绝对值函数和按元素求和组合起来。
u = torch.tensor([3, 4])
torch.abs(u).sum()
L2范数和L1范数都是更一般的LP范数的特例:
范数和目标:
地使用L2范数的平方。我们还会经常遇到L1范数,它表示为向量元素的绝对值之和:
x ∣ 1 = ∑ i = 1 n ∣ x i ∣ { \bf x } | _ { 1 } = \sum _ { i = 1 } ^ { n } { } |{ x } { } _ { i }| x∣1=i=1∑n∣xi∣
与L2范数相比,L1范数受异常值的影响较小。为了计算L1范数,我们将绝对值函数和按元素求和组合起来。
u = torch.tensor([3, 4])
torch.abs(u).sum()
L2范数和L1范数都是更一般的LP范数的特例:
[外链图片转存中…(img-rVpkaMAL-1651218583741)]
范数和目标:
在深度学习中,我们经常试图解决优化问题:最大化分配给观测数据的概率;最小化预测和真实观测之间的距离。用向量表示物品(如单词、产品或新闻文章),以便最小化相似项目之间的距离,最大化不同项目之间的距离。通常,目标,或许是深度学习算法最终要的组成部分(除了数据),被表达为范数。