点云分割-pcl区域生长算法
目录
- 写在前面
- 原理
- 代码
-
- 运行结果
- 参考
- 完
写在前面
1、本文内容
pcl的区域生长算法的使用和原理
2、平台/环境
cmake, pcl
3、转载请注明出处:
https://blog.csdn.net/qq_41102371/article/details/131927376
原理
参考:https://pcl.readthedocs.io/projects/tutorials/en/master/region_growing_segmentation.html#region-growing-segmentation
https://blog.csdn.net/taifyang/article/details/124097186
这里主要将可设置的参数列出:
KSearch: 用于计算法向量的最近邻点数量,针对K近邻搜索求法向量,也可使用半径搜索求法向量:
normal_estimator.setKSearch(KSearch);// 30
// normal_estimator.setRadiusSearch(2);
MinClusterSize: 至少多少点才能构成一个簇
NumberOfNeighbours: 区域生长的近邻点数量
SmoothnessThreshold: 法向量角度阈值,判断当前邻域点和种子点的法向量夹角是否小于此阈值,小于则将当前邻域点加入当前簇
CurvatureThreshold: 曲率阈值,若当前近邻点与种子点夹角小于法向量阈值,并且曲率小于此曲率阈值,则加入种子点
代码
新建文件夹
mkdir pcl_region_growging_segmentation
cd pcl_region_growging_segmentation
pcl_region_growging_segmentation/CMakeLists.txt
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(region_growing_segmentation)
find_package(PCL 1.5 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (region_growing_segmentation region_growing_segmentation.cpp)
target_link_libraries (region_growing_segmentation ${PCL_LIBRARIES})
pcl_region_growging_segmentation/region_growging_segmentation.cpp
#include windows: pcl_region_growging_segmentation/compile.bat
cmake -DCMAKE_BUILD_TYPE=Release -DPCL_DIR="your pcl path whcih including cmake files of pcl" -S ./ -B ./build
cmake --build ./build --config Release --parallel 8 --target ALL_BUILD
for example:
-DPCL_DIR="D:/carlos/install/PCL 1.10.0/cmake"
linux: pcl_region_growging_segmentation/compile.sh
cmake -DCMAKE_BUILD_TYPE=Release -DPCL_DIR="your pcl path whcih including cmake files of pcl" -S ./ -B ./build
cmake --build ./build --config Release --parallel 8
运行结果
windows: pcl_region_growging_segmentation/run.bat
set PATH=D:\carlos\install\PCL 1.10.0\bin;D:\carlos\install\PCL 1.10.0\3rdParty\FLANN\bin;D:\carlos\install\PCL 1.10.0\3rdParty\VTK\bin;D:\carlos\install\PCL 1.10.0\3rdParty\Qhull\bin;D:\carlos\install\PCL 1.10.0\3rdParty\OpenNI2\Tools;%PATH%
.\build\Release\region_growing_segmentation.exe ^
C:\Users\12538\Downloads\region_growing_tutorial.pcd ^
50 500 30 5 1.0
其中set PATH是设置环境变量,用于运行时能够找到pcl所需要的dll
pcl提供的测试数据:https://raw.github.com/PointCloudLibrary/data/master/tutorials/region_growing_tutorial.pcd
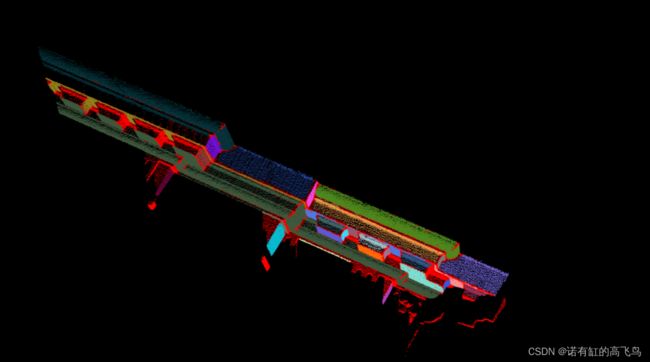
包含建筑,车辆,树木的一个点云数据:
参考
文中已列出
完
主要做激光/影像三维重建,配准、分割等常用点云算法,技术交流、咨询可私信