OpenCV
文章目录
- OpenCV学习报告
-
- 读取图片和网络摄像头
-
- 1.1 图片读取
- 1.2 视频读取
-
- 1.1.1 读取视频文件
- 1.1.2读取网络摄像头
- OpenCV基础功能
- 调整、裁剪图像
-
- 3.1 调整图像大小
- 3.2 裁剪图像
- 图像上绘制形状和文本
-
- 4.1 图像上绘制形状
- 4.2图像上写文字
- 透视变换
- 图像拼接
- 颜色检测
- 轮廓检测
- 人脸检测
-
- 9.1静态图片
- 9.2 摄像头
- 实战
-
- 10.1虚拟绘画
- 10.2纸张扫描
- 10.3 车牌检测器
- 参考资料
OpenCV学习报告
读取图片和网络摄像头
1.1 图片读取
import cv2
# read image
img = cv2.imread("Resources/dnn.jpg")
cv2.imshow("Output",img)
cv2.waitKey(0)
1.2 视频读取
1.1.1 读取视频文件
import cv2
# read video
cap = cv2.VideoCapture("Resources/test_video.mp4")
while True:
success,img = cap.read()
cv2.imshow("Video",img)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
1.1.2读取网络摄像头
import cv2
# read webcam
cap = cv2.VideoCapture(0)
cap.set(3,640) #width
cap.set(4,480) #height
cap.set(10,100)
while True:
success,img = cap.read()
cv2.imshow("Video",img)
if cv2.waitKey(1) & 0xFF == ord('q'):
break

OpenCV基础功能
import cv2
import numpy as np
# basic function
img = cv2.imread("Resources/dnn.jpg")
kernel = np.ones((5,5),np.uint8)
# 灰度转换
imgGray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# 图像模糊
imgBlur = cv2.GaussianBlur(imgGray,(7,7),0)
# 边缘检测
imgCanny = cv2.Canny(img,100,100)
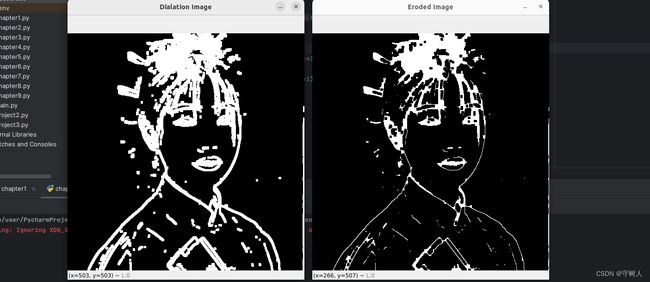
# 膨胀
imgDialation = cv2.dilate(imgCanny, kernel,iterations=1)
# 腐蚀
imgEroded = cv2.erode(imgDialation,kernel,iterations=1)
# cv2.imshow("Output",img)
cv2.imshow("Gray Image",imgGray)
cv2.imshow("Blur Image",imgBlur)
cv2.imshow("Blur Image",imgCanny)
cv2.imshow("Dialation Image",imgDialation)
cv2.imshow("Eroded Image",imgEroded)
cv2.waitKey(0)

调整、裁剪图像
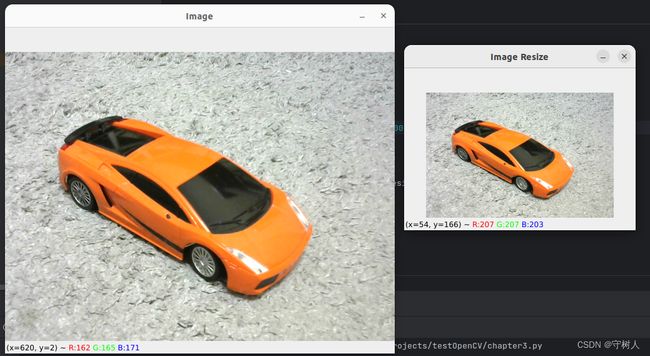
3.1 调整图像大小
import cv2
# resize image
img = cv2.imread("Resources/lambo.PNG")
print(img.shape)
imgResize = cv2.resize(img,(300,200))
print(imgResize.shape)
cv2.imshow("Image",img)
cv2.imshow("Image Resize",imgResize)
cv2.waitKey(0)
3.2 裁剪图像
import cv2
img=cv2.imread("Resources/lambo.PNG")
cv2.imshow('image',img)
print(img.shape)#height,width,dpth
crop_img=img[100:400,50:500]
cv2.imshow('crop image',crop_img)
cv2.waitKey(0)

图像上绘制形状和文本
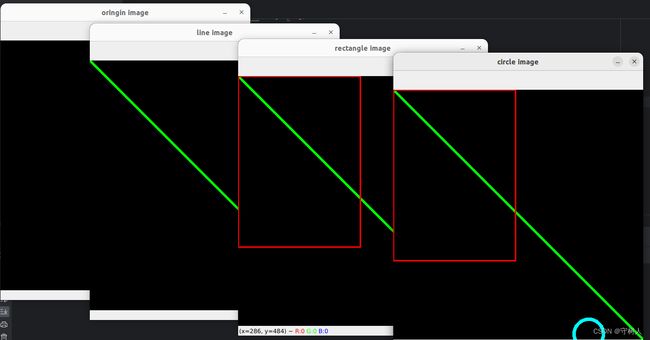
4.1 图像上绘制形状
import cv2
import numpy as np
# shapes and texts
img = np.zeros((512,512,3),np.uint8)
cv2.imshow('oringin image',img)
cv2.line(img,(0,0),(img.shape[1],img.shape[0]),(0,255,0),3)
cv2.imshow('line image',img)
cv2.rectangle(img,(0,0),(250,350),(0,0,255),2)
cv2.imshow('rectangle image',img)
cv2.circle(img,(400,500),30,(255,255,0),5)
cv2.imshow('circle image',img)
cv2.waitKey(0)
4.2图像上写文字
import cv2
import numpy as np
img = np.zeros((512,512,3),np.uint8)
cv2.imshow('oringin image',img)
cv2.putText(img,"OPENCV",(300,200),cv2.FONT_HERSHEY_COMPLEX,1,(0,150,0),1)
cv2.imshow("putText01 Image",img)
cv2.putText(img,"I LOVE XD",(100,300),cv2.FONT_HERSHEY_COMPLEX,1,(0,150,0),1)
cv2.imshow("putText02 Image",img)
cv2.waitKey(0)

透视变换
import cv2
import numpy as np
# warp perspective
img = cv2.imread("Resources/cards.jpg")
width,height = 250,350
pts1 = np.float32([[111,219],[287,188],[154,482],[352,440]])
pts2 = np.float32([[0,0],[width,0],[0,height],[width,height]])
matrix = cv2.getPerspectiveTransform(pts1,pts2)
imgOutput = cv2.warpPerspective(img,matrix,(width,height))
cv2.imshow("Image",img)
cv2.imshow("Output",imgOutput)
cv2.waitKey(0)

图像拼接
import cv2
import numpy as np
# join images
def stackImages(scale,imgArray):
rows = len(imgArray)
cols = len(imgArray[0])
rowsAvailable = isinstance(imgArray[0], list)
width = imgArray[0][0].shape[1]
height = imgArray[0][0].shape[0]
if rowsAvailable:
for x in range ( 0, rows):
for y in range(0, cols):
if imgArray[x][y].shape[:2] == imgArray[0][0].shape [:2]:
imgArray[x][y] = cv2.resize(imgArray[x][y], (0, 0), None, scale, scale)
else:
imgArray[x][y] = cv2.resize(imgArray[x][y], (imgArray[0][0].shape[1], imgArray[0][0].shape[0]), None, scale, scale)
if len(imgArray[x][y].shape) == 2: imgArray[x][y]= cv2.cvtColor( imgArray[x][y], cv2.COLOR_GRAY2BGR)
imageBlank = np.zeros((height, width, 3), np.uint8)
hor = [imageBlank]*rows
hor_con = [imageBlank]*rows
for x in range(0, rows):
hor[x] = np.hstack(imgArray[x])
ver = np.vstack(hor)
else:
for x in range(0, rows):
if imgArray[x].shape[:2] == imgArray[0].shape[:2]:
imgArray[x] = cv2.resize(imgArray[x], (0, 0), None, scale, scale)
else:
imgArray[x] = cv2.resize(imgArray[x], (imgArray[0].shape[1], imgArray[0].shape[0]), None,scale, scale)
if len(imgArray[x].shape) == 2: imgArray[x] = cv2.cvtColor(imgArray[x], cv2.COLOR_GRAY2BGR)
hor= np.hstack(imgArray)
ver = hor
return ver
img = cv2.imread('Resources/dnn.jpg')
imgGray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
imgStack = stackImages(0.5,([img,imgGray,img],[img,img,img]))
# imgHdr = np.hstack((img,img))
# imgVer = np.vstack((img,img))
# cv2.imshow("Horizontal",imgHdr)
# cv2.imshow("Vertical",imgVer)
cv2.imshow("ImageStack",imgStack)
cv2.waitKey(0)

颜色检测
import cv2
import numpy as np
# color dection
def empty(a):
pass
'''连接图片'''
def stackImages(scale,imgArray):
rows = len(imgArray)
cols = len(imgArray[0])
rowsAvailable = isinstance(imgArray[0], list)
width = imgArray[0][0].shape[1]
height = imgArray[0][0].shape[0]
if rowsAvailable:
for x in range ( 0, rows):
for y in range(0, cols):
if imgArray[x][y].shape[:2] == imgArray[0][0].shape [:2]:
imgArray[x][y] = cv2.resize(imgArray[x][y], (0, 0), None, scale, scale)
else:
imgArray[x][y] = cv2.resize(imgArray[x][y], (imgArray[0][0].shape[1], imgArray[0][0].shape[0]), None, scale, scale)
if len(imgArray[x][y].shape) == 2: imgArray[x][y]= cv2.cvtColor( imgArray[x][y], cv2.COLOR_GRAY2BGR)
imageBlank = np.zeros((height, width, 3), np.uint8)
hor = [imageBlank]*rows
hor_con = [imageBlank]*rows
for x in range(0, rows):
hor[x] = np.hstack(imgArray[x])
ver = np.vstack(hor)
else:
for x in range(0, rows):
if imgArray[x].shape[:2] == imgArray[0].shape[:2]:
imgArray[x] = cv2.resize(imgArray[x], (0, 0), None, scale, scale)
else:
imgArray[x] = cv2.resize(imgArray[x], (imgArray[0].shape[1], imgArray[0].shape[0]), None,scale, scale)
if len(imgArray[x].shape) == 2: imgArray[x] = cv2.cvtColor(imgArray[x], cv2.COLOR_GRAY2BGR)
hor= np.hstack(imgArray)
ver = hor
return ver
# 调整滑动条的位置来改变图像的颜色阈值,从而实现对图像的颜色分割或过滤
path = 'Resources/lambo.PNG'
framWidth = 640
framHeight = 480
cap = cv2.VideoCapture(path)
cap.set(3,framWidth) #width
cap.set(4,framHeight) #height
cap.set(10,150)
cv2.namedWindow("TrackBars")
cv2.resizeWindow("TrackBars",640,240)
cv2.createTrackbar("Hue Min","TrackBars",0,179,empty) # hue
cv2.createTrackbar("Hue Max","TrackBars",179,179,empty)
cv2.createTrackbar("Sat Min","TrackBars",0,255,empty) # saturation
cv2.createTrackbar("Sat Max","TrackBars",255,255,empty)
cv2.createTrackbar("Val Min","TrackBars",0,255,empty) # value
cv2.createTrackbar("Val Max","TrackBars",255,255,empty)
while True:
img = cv2.imread(path)
imgHSV = cv2.cvtColor(img,cv2.COLOR_BGR2HSV)
h_min = cv2.getTrackbarPos("Hue Min","TrackBars")
h_max = cv2.getTrackbarPos("Hue Max", "TrackBars")
s_min = cv2.getTrackbarPos("Sat Min", "TrackBars")
s_max = cv2.getTrackbarPos("Sat Max", "TrackBars")
v_min = cv2.getTrackbarPos("Val Min", "TrackBars")
v_max = cv2.getTrackbarPos("Val Max", "TrackBars")
# print(h_min,h_max,s_min,s_max,v_min,v_max)
lower = np.array([h_min,s_min,v_min])
upper = np.array([h_max,s_max,v_max])
#用掩码对原始图像进行位运算
mask = cv2.inRange(imgHSV,lower,upper)
imgResult = cv2.bitwise_and(img,img,mask=mask) #二值图像
# cv2.imshow("Original",img)
# cv2.imshow("HSV",imgHSV)
# cv2.imshow("Mask", mask)
# cv2.imshow("Result", imgResult)
imgStack = stackImages(0.6, ([img, imgHSV], [mask, imgResult]))
cv2.imshow("Stacked Images", imgStack)
cv2.waitKey(1)

轮廓检测
import cv2
import numpy as np
#contours / shape detection
def stackImages(scale,imgArray):
rows = len(imgArray)
cols = len(imgArray[0])
rowsAvailable = isinstance(imgArray[0], list)
width = imgArray[0][0].shape[1]
height = imgArray[0][0].shape[0]
if rowsAvailable:
for x in range ( 0, rows):
for y in range(0, cols):
if imgArray[x][y].shape[:2] == imgArray[0][0].shape [:2]:
imgArray[x][y] = cv2.resize(imgArray[x][y], (0, 0), None, scale, scale)
else:
imgArray[x][y] = cv2.resize(imgArray[x][y], (imgArray[0][0].shape[1], imgArray[0][0].shape[0]), None, scale, scale)
if len(imgArray[x][y].shape) == 2: imgArray[x][y]= cv2.cvtColor( imgArray[x][y], cv2.COLOR_GRAY2BGR)
imageBlank = np.zeros((height, width, 3), np.uint8)
hor = [imageBlank]*rows
hor_con = [imageBlank]*rows
for x in range(0, rows):
hor[x] = np.hstack(imgArray[x])
ver = np.vstack(hor)
else:
for x in range(0, rows):
if imgArray[x].shape[:2] == imgArray[0].shape[:2]:
imgArray[x] = cv2.resize(imgArray[x], (0, 0), None, scale, scale)
else:
imgArray[x] = cv2.resize(imgArray[x], (imgArray[0].shape[1], imgArray[0].shape[0]), None,scale, scale)
if len(imgArray[x].shape) == 2: imgArray[x] = cv2.cvtColor(imgArray[x], cv2.COLOR_GRAY2BGR)
hor= np.hstack(imgArray)
ver = hor
return ver
def getContours(img):
contours,hierarchy = cv2.findContours(img,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_NONE)
for cnt in contours:
area = cv2.contourArea(cnt)
print(area)
if area>500:
cv2.drawContours(imgContour,cnt,-1,(255,0,0),3)
#计算轮廓曲线长度
peri = cv2.arcLength(cnt,True)
print(peri)
approx = cv2.approxPolyDP(cnt,0.02*peri,True)
print(len(approx))
objCor = len(approx)
x,y,w,h = cv2.boundingRect(approx)
# 图形分类
if objCor == 3: objectType = "Tri"
elif objCor == 4 :
aspRatio = w / float(h)
if aspRatio > 0.98 and aspRatio < 1.03: objectType = "Square"
else: objectType = "Rectangle"
elif objCor > 4: objectType = "Circles"
else: objectType = "None"
cv2.rectangle(imgContour,(x,y),(x+w,y+h),(0,255,0),2)
cv2.putText(imgContour,objectType,(x+(w//2)-10,y+(h//2)-10),cv2.FONT_HERSHEY_COMPLEX,0.7,(0,0,0),2)
path = 'Resources/shapes.png'
img = cv2.imread(path)
imgContour = img.copy()
imgGray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
imgBlur = cv2.GaussianBlur(imgGray,(7,7),1)
imgCanny = cv2.Canny(imgBlur,50,50)
getContours(imgCanny)
imgBlank = np.zeros_like(img)
imgStack = stackImages(0.8,([img,imgGray],[imgCanny,imgContour]))
cv2.imshow("Stack",imgStack)
cv2.waitKey(0)

人脸检测
9.1静态图片
import cv2
# face detection
faceCascade = cv2.CascadeClassifier("Resources/haarcascade_frontalface_default.xml")
img = cv2.imread("Resources/dnn.jpg")
imgGray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
faces = faceCascade.detectMultiScale(imgGray,1.1,4)
for(x,y,w,h) in faces:
cv2.rectangle(img,(x,y),(x+w,y+h),(255,0,0),2)
cv2.imshow("Result",img)
cv2.waitKey(0)

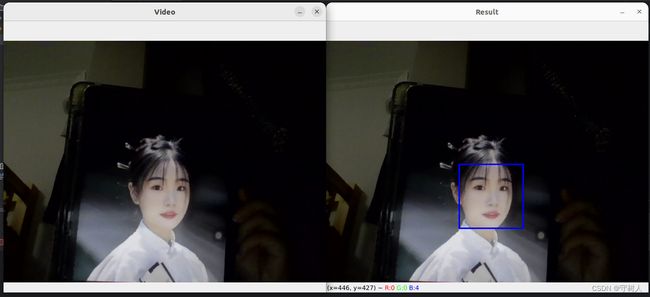
9.2 摄像头
import cv2
faceCascade = cv2.CascadeClassifier("Resources/haarcascade_frontalface_default.xml")
cap = cv2.VideoCapture(0)
cap.set(3,640) #width
cap.set(4,480) #height
cap.set(10,100)
while True:
success,img = cap.read()
cv2.imshow("Video",img)
imgGray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
faces = faceCascade.detectMultiScale(imgGray, 1.1, 4)
for (x, y, w, h) in faces:
cv2.rectangle(img, (x, y), (x + w, y + h), (255, 0, 0), 2)
cv2.imshow("Result", img)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
实战
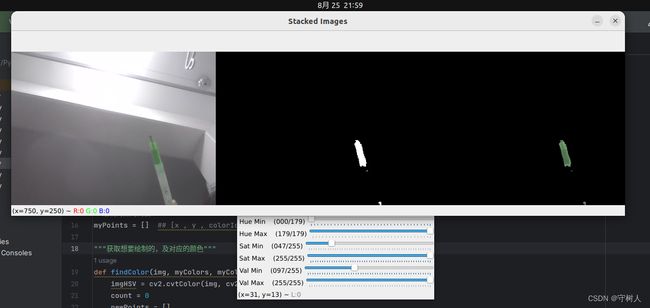
10.1虚拟绘画
import cv2
import numpy as np
frameWidth = 640
frameHeight = 480
cap = cv2.VideoCapture(0)
cap.set(3, frameWidth)
cap.set(4, frameHeight)
cap.set(10, 150)
# 想要检测的颜色
myColors = [[0,89,0,98,255,255], [0,47,0,97,255,255], [0,66,0,179,255,255], [0,54,0,98,255,255]]
# 想要绘制的颜色 BGR
myColorValues = [[51, 153, 255],[0, 255, 0],[255,0,0],[0,255,255]]
# 绘制的点的列表
myPoints = [] ## [x , y , colorId ]
"""获取想要绘制的,及对应的颜色"""
def findColor(img, myColors, myColorValues):
imgHSV = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
count = 0
newPoints = []
for color in myColors:
lower = np.array(color[0:3])
upper = np.array(color[3:6])
mask = cv2.inRange(imgHSV, lower, upper)
x, y = getContours(mask) # 想要绘制的点
cv2.circle(imgResult, (x, y), 20, myColorValues[count], cv2.FILLED) # 将点绘制在图上
if x != 0 and y != 0:
newPoints.append([x, y, count]) # 将点添加到 newPoints列表中,count为想要绘制颜色的编号
count += 1
return newPoints
def getContours(img):
contours, Heriachy = cv2.findContours(img, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
x, y, w, h = 0, 0, 0, 0
for cnt in contours:
area = cv2.contourArea(cnt)
if area > 500:
# cv2.drawContours(imgResult, cnt, -1, (255, 0, 0), 3)
peri = cv2.arcLength(cnt, True)
approx = cv2.approxPolyDP(cnt, 0.02 * peri, True)
x, y, w, h = cv2.boundingRect(approx)
return x + w // 2, y
"""把点绘制在画布上"""
def drawOnCanvas(myPoints, myColorValues):
for point in myPoints:
cv2.circle(imgResult, (point[0], point[1]), 20, myColorValues[point[2]], cv2.FILLED)
while True:
success, img = cap.read()
imgResult = img.copy()
newPoints = findColor(img, myColors, myColorValues) # 想要绘制的点
if len(newPoints) != 0:
for newP in newPoints:
myPoints.append(newP)
if len(myPoints) != 0:
drawOnCanvas(myPoints, myColorValues) # 将点绘制在画布上
cv2.imshow("Result", imgResult)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
利用颜色检测滑杆来得出笔的颜色



10.2纸张扫描
import cv2
import numpy as np
widthImg=480
heightImg =640
img = cv2.imread("Resources/1.jpg")
"""图像预处理"""
def preProcessing(img):
imgGray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
imgBlur = cv2.GaussianBlur(imgGray,(5,5),1)
imgCanny = cv2.Canny(imgBlur,200,200)
kernel = np.ones((5,5))
imgDial = cv2.dilate(imgCanny,kernel,iterations=2)
imgThres = cv2.erode(imgDial,kernel,iterations=1)
return imgThres
'''获取最大轮廓角点'''
def getContours(img):
biggest = np.array([])
maxArea = 0
contours,Heriachy= cv2.findContours(img,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_NONE)
for cnt in contours:
area = cv2.contourArea(cnt)
if area>5000:
peri = cv2.arcLength(cnt,True)
approx = cv2.approxPolyDP(cnt,0.02*peri,True)
if area >maxArea and len(approx) == 4:
biggest = approx
maxArea = area
#绘制轮廓(biggest仅仅包含矩形的轮廓)
cv2.drawContours(imgContour, biggest, -1, (255, 0, 0), 20)
return biggest
'''矩形角点的重新处理:按照一定的顺序排列(左上,右上,左下,右下)'''
def reorder (myPoints):
myPoints = myPoints.reshape((4,2))#四个角点
myPointsNew = np.zeros((4,1,2),np.int32)
#点按照一定的顺序重新排列
add = myPoints.sum(1)#将点进行x+y计算,
myPointsNew[0] = myPoints[np.argmin(add)] #和最小的点为左上角点
myPointsNew[3] = myPoints[np.argmax(add)]#和最大的点为右下角点
diff = np.diff(myPoints,axis=1)#将点进行x-y差异计算
myPointsNew[1]= myPoints[np.argmin(diff)]#差异最小的点为右上
myPointsNew[2] = myPoints[np.argmax(diff)]#差异最大的点为左下
return myPointsNew
'''鸟瞰转换'''
def getWarp(img,biggest):
#矩阵角点的处理,按照一个统一顺序排列
biggest = reorder(biggest)
pts1 = np.float32(biggest)
pts2 = np.float32([[0, 0], [widthImg, 0], [0, heightImg], [widthImg, heightImg]])
matrix = cv2.getPerspectiveTransform(pts1, pts2)
#鸟瞰图
imgOutput = cv2.warpPerspective(img, matrix, (widthImg, heightImg))
#得到的鸟瞰图,边缘有其他背景,所以裁剪边缘,并将裁剪后的图像,重新调整为原来窗口大小。
imgCropped = imgOutput[20:imgOutput.shape[0]-20,20:imgOutput.shape[1]-20]
imgCropped = cv2.resize(imgCropped,(widthImg,heightImg))
return imgCropped
'''图像堆叠显示'''
def stackImages(scale,imgArray):
rows = len(imgArray)
cols = len(imgArray[0])
rowsAvailable = isinstance(imgArray[0], list)
width = imgArray[0][0].shape[1]
height = imgArray[0][0].shape[0]
if rowsAvailable:
for x in range ( 0, rows):
for y in range(0, cols):
if imgArray[x][y].shape[:2] == imgArray[0][0].shape [:2]:
imgArray[x][y] = cv2.resize(imgArray[x][y], (0, 0), None, scale, scale)
else:
imgArray[x][y] = cv2.resize(imgArray[x][y], (imgArray[0][0].shape[1], imgArray[0][0].shape[0]), None, scale, scale)
if len(imgArray[x][y].shape) == 2: imgArray[x][y]= cv2.cvtColor( imgArray[x][y], cv2.COLOR_GRAY2BGR)
imageBlank = np.zeros((height, width, 3), np.uint8)
hor = [imageBlank]*rows
hor_con = [imageBlank]*rows
for x in range(0, rows):
hor[x] = np.hstack(imgArray[x])
ver = np.vstack(hor)
else:
for x in range(0, rows):
if imgArray[x].shape[:2] == imgArray[0].shape[:2]:
imgArray[x] = cv2.resize(imgArray[x], (0, 0), None, scale, scale)
else:
imgArray[x] = cv2.resize(imgArray[x], (imgArray[0].shape[1], imgArray[0].shape[0]), None,scale, scale)
if len(imgArray[x].shape) == 2: imgArray[x] = cv2.cvtColor(imgArray[x], cv2.COLOR_GRAY2BGR)
hor= np.hstack(imgArray)
ver = hor
return ver
while True:
imgresize = cv2.resize(img,(widthImg,heightImg))
imgContour = imgresize.copy()
imgThres = preProcessing(imgresize)
biggest = getContours(imgThres)
if biggest.size != 0:
# 鸟瞰转换
imgWarped = getWarp(imgresize, biggest)
imageArray = ([imgresize,imgThres],
[imgContour,imgWarped])
cv2.imshow("ImageWarped", imgWarped)
else:
imageArray = ([imgContour, img])
# 图像堆叠显示
stackedImages = stackImages(0.5, imageArray)
cv2.imshow("WorkFlow", stackedImages)
cv2.waitKey(0)

10.3 车牌检测器
import cv2
frameWidth = 640
frameHeight = 480
nPlateCascade = cv2.CascadeClassifier("Resources/haarcascade_russian_plate_number.xml")
minArea = 200
color = (255,0,255)
cap = cv2.VideoCapture(0)
cap.set(3, frameWidth)
cap.set(4, frameHeight)
cap.set(10,150)
count = 0
while True:
success, img = cap.read()
imgGray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#车牌检测
numberPlates = nPlateCascade.detectMultiScale(imgGray, 1.1, 10)
for (x, y, w, h) in numberPlates:
area = w*h
if area >minArea:
#绘制矩形
cv2.rectangle(img, (x, y), (x + w, y + h), (255, 0, 255), 2)
#绘制文字
cv2.putText(img,"Number Plate",(x,y-5),cv2.FONT_HERSHEY_COMPLEX_SMALL,1,color,2)
imgRoi = img[y:y+h,x:x+w]
cv2.imshow("ROI", imgRoi)
cv2.imshow("Result", img)
if cv2.waitKey(1) & 0xFF == ord('s'):
cv2.imwrite("Resources/Scanned/NoPlate_"+str(count)+".jpg",imgRoi)
cv2.rectangle(img,(0,200),(640,300),(0,255,0),cv2.FILLED)
cv2.putText(img,"Scan Saved",(150,265),cv2.FONT_HERSHEY_DUPLEX,2,(0,0,255),2)
cv2.imshow("Result",img)
cv2.waitKey(500)
count +=1
break
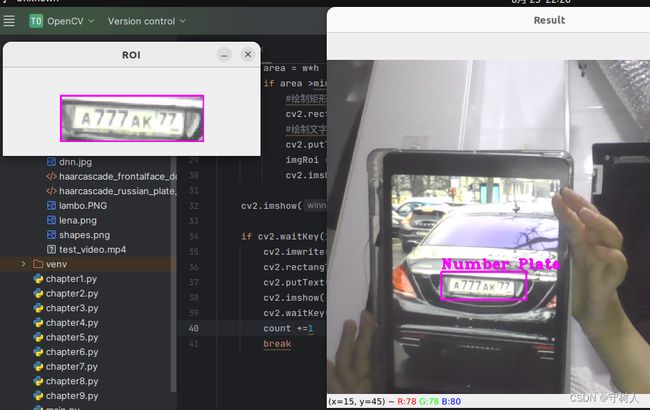
按s键后可保存车牌
参考资料
ChatGPT (openai.com)
RGB Color Codes Chart (rapidtables.com)
图像基本操作 - 【布客】OpenCV 4.0.0 中文翻译 (apachecn.org)