AD转换芯片精度计算及校正方法
文章目录
- 前言
- 一、转换精度
- 二、重要参数
-
- 1.线性误差(INL)和差分线性误差(DNL)
- 2.失调误差和增益误差
- 三、转换校正
- 总结
前言
本文对模数转换芯片的精度进行简要介绍,帮助大家正确选型,并介绍了一个基本的ADC转换结果校正方法。专业术语在不同厂家的芯片使用手册中可能不相同,若要详细了解还需要阅读产品手册~
一、转换精度
【重要参数】
FS:满量程值。
LSB:最低有效位,即ADC输出的二进制码最低位0…(n个0)1代表的电压值大小。
假设ADC的输出位数为n位,那么 L S B = [ + F S − ( − F S ) ] 2 n LSB={[+FS-(-FS)]\over2^{n}} LSB=2n[+FS−(−FS)]
【量化误差】
ADC输出的值是按LSB变化的,当输入电压值介于1LSB之间时,输出值会按一定规则入位或舍弃,这个过程产生的误差是量化误差,无法消除。
量化误差最大是1LSB,因此在对ADC芯片进行选型时,首先考虑芯片的输出位数,这决定了其LSB值。在满量程值不变的情况下,输出位数越高,LSB值越小,精度也就越高。
若计算得到的LSB满足设计对ADC误差的要求,那么才对芯片进行其他性能的考量。
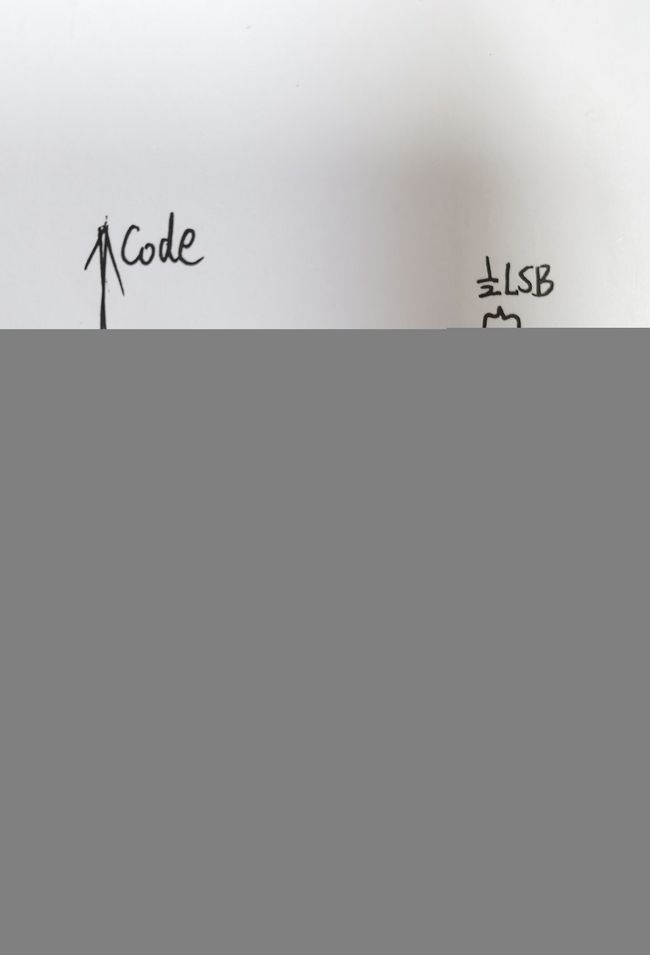
下图是某16位输出ADC芯片的理想传递函数曲线,该芯片可以测量负输入,输出为二进制补码,且输出码的转换在LSB的中间位置(1/2LSB或3/2LSB处)。由于输出是补码形式,因此当最高位为1时表示输入为负电压,最高位是0时表示输入为正电压。

例如,输出100…000时,对应输入是 − F S − 1 2 L S B ∼ F S + 1 2 L S B -FS-{1\over2}LSB \thicksim FS+{1\over2}LSB −FS−21LSB∼FS+21LSB;
输出为000…000时,对应输入是 0 − 1 2 L S B ∼ 0 + 1 2 L S B 0-{1\over2}LSB \thicksim 0+{1\over2}LSB 0−21LSB∼0+21LSB。
经推导,输入正电压时,将输出码直接转换为十进制,与LSB相乘得到对应的电压值;输入负电压时,将输出码按位取反后转换为十进制,再取该十进制的相反数,与LSB相乘后即为对应的电压值。
二、重要参数
1.线性误差(INL)和差分线性误差(DNL)
线性误差又称积分非线性,指实际测量中每一个独立编码与一条从“0”端到“满量程”端直线之间的偏移值。其中“0”端指在第一次码变化的前1/2LSB处,“满量程”端指在最后一次码跳变的后1/2LSB处。每一个码的偏移值是从码的中间位置计算的。如下图所示:
理想状态中,输出码值与其中间位置对应的输入值满足线性关系,且为 V o u t = V i n Vout=Vin Vout=Vin(斜率为1,偏置为0)
但在实际使用中,二者的关系并非严格线性,存在线性误差,每一个码的误差不一样。
- 若该误差的最大值在 ± 1 2 L S B ±{1\over2}LSB ±21LSB 以内,当输入模拟电压值正好是码的中间位置值时,能正确译出码值;当输入电压相对中间位置值有偏差时,可能会译为相邻码值。
- 若该误差的最大值在±1LSB内,则译码结果为正确码值或者是相邻码值。
因此,在芯片选型时,尽量选择INL在全量程范围内的绝对值小于1/2LSB的型号,输入输出的关系更接近于线性,精度会更高。
下图为某ADC芯片的INL性能曲线,能看出每一个码的偏移值并不相同。

还有一个对应参数,是差分线性误差,又称差分非线性(DNL),其含义是任意两个相邻码之间所测得变化值与理想的 1 L S B 1LSB 1LSB 值之间的差异。设置该参数的目的是为了保证在输入电压增加的过程中,输出码能够没有遗漏地递增出现。
2.失调误差和增益误差
实际使用时,我们一般假设输入与输出之间满足线性关系,但是线性的斜率与偏置值并不理想(理想中斜率为1,偏置为0),这就是在校正时需要计算的值。
其中偏置值由失调误差决定,斜率由增益误差(Gain Error)决定。
【失调误差】 指码跳变时的实际电压值与理想电压值之差,是将整个传递函数偏移了相同的值,对应线性函数中的偏置,可以通过从ADC输出中减去该值来校准。
消除失调误差后,可以保证实际输出码的第一次跃迁与理想的转换一致,但不能保证其他跃迁也和理想情况在相同输入值下发生。这就引出了增益误差的概念。
【增益误差】 指消除失调误差后,理想增益点与实际增益点之差(增益点是最后一次码跳变后的1/2LSB点),对术语的解释在不同厂家的手册中可能不一样,但是本质相同。增益误差的概念如下图所示:

由图可知,增益误差带来的是斜率的改变。
还有一个相似的参数是满量程误差(Full Scale Calibration Error),该误差是在未进行失调误差校正的情况下,最后一次码跃迁时的实际输入与理想输入之间的差值。
三、转换校正
在使用ADC芯片时,为了修正增益误差和失调误差,提高转换精度,一般会使用硬件或软件校正。校准过程根据实际测得的输入与输出值进行计算,不依靠器件手册中提供的误差参考值。
例如,在下图中,输入电压量程为 − 10 V ∼ 10 V -10V \thicksim 10V −10V∼10V
实线是理论转换结果,表达式为 V o u t = V i n Vout=Vin Vout=Vin;
虚线为实际转换结果,偏置是 y 0 y0 y0,斜率为 k k k,即 V o u t = k × V i n + y 0 Vout=k \times Vin+y0 Vout=k×Vin+y0,那么对Vout的修正结果即为 V c o r r e c t e d = ( V o u t − y 0 ) k Vcorrected={(Vout-y0) \over k} Vcorrected=k(Vout−y0),可以在软件中利用公式完成此修正。
其中, y 0 y0 y0的值是在输入电压0V时,实际输出与输入间的偏差;
计算 k k k值时,选择量程内的两个不同输入电压 V i n 1 Vin1 Vin1、 V i n 2 Vin2 Vin2,测量其对应的实际输出 y 1 y1 y1、 y 2 y2 y2,则
k = ( y 2 − y 1 ) ( V i n 2 − V i n 1 ) k={(y2-y1) \over ( Vin2-Vin1)} k=(Vin2−Vin1)(y2−y1)

根据上述方法,即可完成对ADC输出值的校正。
总结
在使用ADC时,除了前期选型注意精度要求外,在实际调试时一定要根据实际转换值与输入值做校正,校正后的转换结果误差会很小。
参考链接:
ADC失调误差和增益误差