SLAM知识点——eigen库学习
文章目录
-
-
- 1 eigen库安装
- 2 eigen matrix的用法
- 3 eigen geometry的用法
- 4 eigen常见报错
- 5 Eigen版本查询
-
Eigen库是一个开源的C++线性代数库,它提供了快速的有关矩阵的线性代数运算,还包括解方程等功能。Eigen是一个用纯头文件搭建起来的库,这意味这你只要能找到它的头文件,就能使用它。Eigen头文件的默认位置是“/usr/include/eigen3”. 由于Eigen库相较于OpenCV中的Mat等库而言更加高效,许多上层的软件库也使用Eigen进行矩阵运算,比如SLAM中常用的g2o,Sophus等。此外Eigen库还被被用于Caffe,Tensorflow等许多深度学习相关的框架中。
————————————————
原文链接:https://blog.csdn.net/u011092188/article/details/77430988/
1 eigen库安装
ubuntu下面是没有安装的需要手动安装,使用下述指令安装,自动装到/usr/include/eigen3
sudo apt-get install libeigen3-dev
eigen是个头文件库,只有h文件,没有cpp文件,在写cmake的时候,只有包含头文件include_directories,不用target_link_libraries
CMakeLists.txt demo:
cmake_minimum_required( VERSION 2.8 )
project( useEigen )
set( CMAKE_BUILD_TYPE "Debug" )
set( CMAKE_CXX_FLAGS "-O3" ) # 这个是干嘛的??
# 添加Eigen头文件
include_directories( "/usr/include/eigen3" )
add_executable( eigenMatrix eigenMatrix.cpp )
注意,是CMakeLists.txt不是CMakeList.txt
补充:
(1)cmake工具安装:sudo apt-get install cmake
或者,安装包安装,下载地址:https://cmake.org/files/
(2)kdevelop安装:sudo apt-get install kdevelop
2 eigen matrix的用法
eigen.cpp
#include
cout<<"time1: "<<1000*(clock()-t_start)/double(CLOCKS_PER_SEC)<<"ms"<<endl;
// (2) 通常用矩阵分解来求,例如QR分解,速度会快很多
clock_t t_start1 = clock();
x = matrix_NN.colPivHouseholderQr().solve(v_Nd);
//cout<<"answer x:"<
cout<<"time2: "<<1000*(clock()-t_start1)/double(CLOCKS_PER_SEC)<<"ms"<<endl;
return 0;
}
注意:CLOCKS_PER_SEC这个宏,在Windows平台下是1000,而到了Linux平台下就是1000000了。不适用该宏,直接使用clock()-t_start1,在windows下面出来的是毫秒,在linux下面出来的是毫秒的1000倍。
linux:
std::cout << 1000 * (clock() - t1) / double(CLOCKS_PER_SEC)<< std::endl; //1
std::cout << clock() - t1<< std::endl; //1000
windows:
std::cout << 1000 * (clock() - t1) / double(CLOCKS_PER_SEC)<< std::endl; //1
std::cout << clock() - t1<< std::endl; //1
输出结果:
-----------1----------
matrix_33:
0.680375 0.59688 -0.329554
-0.211234 0.823295 0.536459
0.566198 -0.604897 -0.444451
transpose:
0.680375 -0.211234 0.566198
0.59688 0.823295 -0.604897
-0.329554 0.536459 -0.444451
sum:
1.61307
trace:
1.05922
10*:
6.80375 5.9688 -3.29554
-2.11234 8.23295 5.36459
5.66198 -6.04897 -4.44451
inverse:
-0.198521 2.22739 2.8357
1.00605 -0.555135 -1.41603
-1.62213 3.59308 3.28973
determinant:
0.208598
-----------2----------
Eigen values =
: 0.0242899
0.992154
1.80558
Eigen vectors =
: -0.549013 -0.735943 0.396198
0.253452 -0.598296 -0.760134
-0.796459 0.316906 -0.514998
time1: 94.697ms
time2: 4.432ms
3 eigen geometry的用法
demo1.cpp
#include
// 2.2 旋转矩阵->旋转向量
Eigen::AngleAxisd R_V2, R_V3;
R_V2 = rotation_matrix; //赋值
Eigen::AngleAxisd R_V4(rotation_matrix); //初始化
R_V3.fromRotationMatrix(rotation_matrix); //注意此方法为旋转向量独有,四元数没有
// 2.3 四元数->旋转向量
AngleAxisd R_V5;
R_V5 = rotation_Q; //赋值
AngleAxisd R_V6(rotation_Q); //初始化
cout<<"R_V1:\n "<<R_V1.matrix()<<endl;
cout<<"R_V2:\n "<<R_V2.matrix()<<endl;
cout<<"R_V3:\n "<<R_V3.matrix()<<endl;
cout<<"R_V4:\n "<<R_V4.matrix()<<endl;
cout<<"R_V5:\n "<<R_V5.matrix()<<endl;
cout<<"R_V6:\n "<<R_V6.matrix()<<endl;
// 3 四元数赋初值
// 注意Eigen库中的四元数前三维是虚部,最后一维是实部
// 3.1旋转角度和旋转轴向量->四元数
float an = M_PI/4;
float nx=0, ny=0, nz=1; //wrong: float nx, ny, nz = 0, 0, 1
Eigen::Quaterniond Q1(cos(an/2), nx*sin(an/2), ny*sin(an/2), nz*sin(an/2));
//两种输出四元数的方式
cout<<"Q1: \n"<<Q1.coeffs()<<endl; //(0,0,0.382683,0.92388)最后一维是实部
cout << Q1.x()<< " " << Q1.y() << " " << Q1.z() <<" " << Q1.w() << endl; //0 0 0.382683 0.92388
// (1) Matrix->vector
cout<<"vector->matrix:\n "<<rotation_vector.matrix()<<endl;
cout<<"vector->matrix: "<<rotation_vector.toRotationMatrix()<<endl;
//3.2 旋转矩阵->四元数
Quaterniond Q2;
Q2 = rotation_matrix;
Quaterniond Q3(rotation_matrix);
cout<<"Q2: \n"<<Q2.coeffs()<<endl; //0 0 0.382683 0.92388
cout<<"Q3: \n"<<Q3.coeffs()<<endl; //0 0 0.382683 0.92388
//3.3 旋转向量->四元数
Quaterniond Q4;
Q4 = rotation_vector;
Quaterniond Q5(rotation_vector);
cout<<"Q4: \n"<<Q4.coeffs()<<endl; //0 0 0.382683 0.92388
cout<<"Q5: \n"<<Q5.coeffs()<<endl; //0 0 0.382683 0.92388
//4 旋转矩阵赋初值
//4.1 旋转矩阵函数->旋转矩阵
Eigen::Matrix3d M1 = Eigen::Matrix3d::Identity(); //3D 旋转矩阵直接使用 Matrix3d 或 Matrix3f; Identity()单位矩阵
//4.2 旋转向量->旋转矩阵
Eigen::Matrix3d M2 = rotation_vector.matrix();
Eigen::Matrix3d M3 = rotation_vector.toRotationMatrix();
//4.3 四元数->旋转矩阵
Eigen::Matrix3d M4 = rotation_Q.matrix(); //rotation_vector.toRotationMatrix()
Eigen::Matrix3d M5 = rotation_Q.toRotationMatrix(); //rotation_vector.toRotationMatrix()
cout<<"M1: \n"<<M1<<endl;
cout<<"M2: \n"<<M2<<endl;
cout<<"M3: \n"<<M3<<endl;
cout<<"M4: \n"<<M4<<endl;
cout<<"M5: \n"<<M5<<endl;
return 0;
}
demo2.cpp
#include补充:
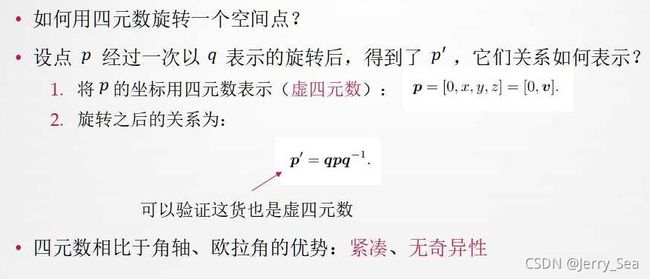
图片来源:高翔-视觉SLAM十四讲PPT
4 eigen常见报错
报错1:使用cv::cv2eigen的时,编译报错
/usr/local/include/opencv4/opencv2/core/eigen.hpp:63:22: error: ‘Eigen’ does not name a type; did you mean ‘eigen’?
void eigen2cv( const Eigen::Matrix<_Tp, _rows, _cols, _options, _maxRows, _maxCols>& src, OutputArray dst )
解决1:由于头文件的引用顺序错误导致,即在include "opencv2/core/eigen.hpp"之前必须先include “eigen3/Eigen/Dense”.
5 Eigen版本查询
pkg-config --modversion eigen3