Pytorch+Yolov3搭建自己的目标检测项目工程(带你从理论到实践)
学习目标
使用pytorch去构建一个Yolov3的项目工程。
参考的原作者的博客:睿智的目标检测26——Pytorch搭建yolo3目标检测平台
构建主干网络darknet53
yolov3采用的主干网络是darknet53,借鉴了yolov2中的网络darknet19结构,相较于后者,前者加入了大量的残差模块,并且使用了步长为2,卷积核大小为3×3卷积层Conv2D替代池化层Maxpooling2D,在imagenet上分类测试上,darknet53在保证准确率的同时极大地提升了网络的运行速度,证明了darknet53在特征提取能力上的有效性。
残差块结构介绍
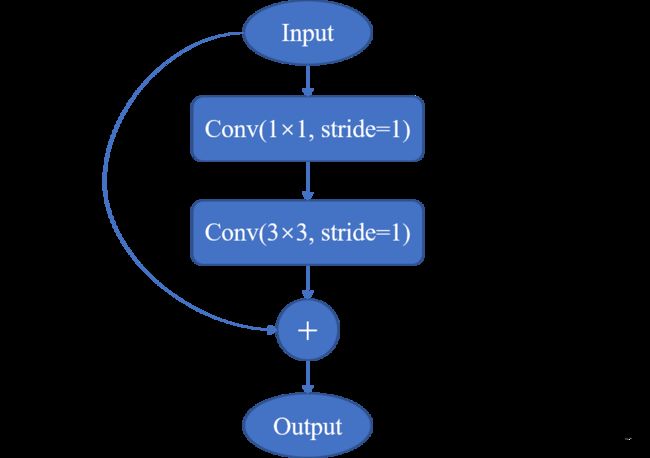
图1 残差块结构
Darknet53中的残差卷积就是先进行1x1卷积下降通道数,然后利用一个3x3卷积提取特征并且上升通道数,最后接上一个残差边。这样不仅保证了特征原本的通道数、长和宽,更是增加了深度提高准确率,这种跳跃连接的方式,也是有效的缓解了网络中增加深度带来的梯度消失问题。
darknet53网络结构
下图2所示就是darknet53的网络结构,网络中堆叠了大量的残差结构Residual,而且每两个残差结构之间插着一个步长为2,卷积核大小为3×3卷积层,用于完成下采样的操作,减小特征图的空间大小,同时扩大通道数。

图2 darknet53网络结构
在源码中,Darknet-53网络的输入尺寸是 [416,416] ,最后卷积层输出的特征图尺寸为1313,通道数为1024。如果是分类任务,最后一个残差结构之后接入全局池化层Global Avgpool,1000个神经元的全连接层Connected,以及一个激活函数层Softmax。但在yolov3中,darknet53只用于提取特征,所以没有最后的这三层,只是输出了三种不同尺寸的特征图:
13 x 13、26 x 26、52 x 52
这样说可能还是不太形象,我们可以来看看下面这张图:

图3 darknet53输出三种不同尺寸的特征图
Conv2D替代池化层
从作用上来说,步长为2的卷积替换池化层都可以完成下采样的工作,但其实现在的神经网络中,池化层已经比较少了,大家都开始尝试其他的下采样方法,比如步长为2的卷积。可这张替代有什么作用呢?我能想到的就是这样可以保持网络的平移不变性,因为卷积层在所有位置上都进行了卷积操作,而不像池化层只选择最大值或平均值。
使用Pytorch实现darknet53网络
import math
from collections import OrderedDict
import torch.nn as nn
# CBLR -> Conv+BN+LeakyReLU
class CBLR(nn.Sequential):
def __init__(self, in_channels, out_channels, kernel_size=3, stride=1, padding=1, bias=False, negative_slope=0.1):
super(CBLR, self).__init__(
nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding, bias=bias),
nn.BatchNorm2d(out_channels),
nn.LeakyReLU(negative_slope)
)
class BasicBlock_with_darknet(nn.Module):
def __init__(self, inplanes, planes):
super(BasicBlock_with_darknet, self).__init__()
# block1 降通道数,block2 再将通道数升回去,如 64->32->64
self.conv = nn.Sequential(
CBLR(inplanes, planes[0], kernel_size=1, padding=0),
CBLR(planes[0], planes[1])
)
def forward(self, x):
residual = x
out = self.conv(x)
out += residual
return out
class DarkNet(nn.Module):
def __init__(self, layers):
super(DarkNet, self).__init__()
self.inplanes = 32
self.layer0 = CBLR(3, self.inplanes) # (3, 416, 416) -> (32, 416, 416)
self.layer1 = self._make_layer([32, 64], layers[0]) # (32, 416, 416) -> (64, 208, 208)
self.layer2 = self._make_layer([64, 128], layers[1]) # (64, 208, 208) -> (128, 104, 104)
self.layer3 = self._make_layer([128, 256], layers[2]) # (128, 104, 104) -> (256, 52, 52)
self.layer4 = self._make_layer([256, 512], layers[3]) # (256, 52, 52) -> (512, 26, 26)
self.layer5 = self._make_layer([512, 1024], layers[4]) # (512, 26, 26) -> (1024, 13, 13)
self.layers_out_filters = [64, 128, 256, 512, 1024]
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def _make_layer(self, planes, blocks):
"""
每一个layer里面,首先利用一个步长为2的3x3卷积进行下采样,然后进行残差结构的堆叠
:param planes: 每个残差块的输入输出通道数
:param blocks: 重复的残差块数
:return:
"""
layers = []
# 下采样,步长为2,卷积核大小为3
layers.append(("ds_conv", nn.Conv2d(self.inplanes, planes[1], kernel_size=3, stride=2, padding=1, bias=False)))
layers.append(("ds_bn", nn.BatchNorm2d(planes[1])))
layers.append(("ds_relu", nn.LeakyReLU(0.1)))
# 加入残差结构,保持输入输出一致性
self.inplanes = planes[1]
for i in range(0, blocks):
layers.append(("residual_{}".format(i), BasicBlock_with_darknet(self.inplanes, planes)))
return nn.Sequential(OrderedDict(layers))
def forward(self, x):
x = self.layer0(x)
x = self.layer1(x)
x = self.layer2(x)
out3 = self.layer3(x)
out4 = self.layer4(out3)
out5 = self.layer5(out4)
return out3, out4, out5
cfgs={
"darknet53":[1, 2, 8, 8, 4]
}
def darknet53(mode="darknet53",pretrained=False):
import torch
model = DarkNet(cfgs[mode])
if pretrained:
model.load_state_dict(torch.load("model_data/darknet53_backbone_weights.pth"))
return modelFPN特征金字塔
如上图3,yolov3提取多特征层进行目标检测,一共提取三个特征层。其位于网络的中下层,三个特征层的shape分别为(52,52,256)、(26,26,512)、(13,13,1024)。从代码中理解就是前向传播中的out3、out4、out5,利用这三个有效特征层就可以进行FPN层的构建。

图4 yolov3网络总体框图
然后,我们就会利用这三有效特征层进行FPN层的构建,构建方式按照下方所示:
首先,对最底层的特征层(13x13x1024)应用5次1x1的卷积操作以减少通道数,得到一个调整后的特征层,一部分会用于YoloHead获得预测结果,另外一部分用于上采样后与(26x26x512)特征层进行结合,特征层的shape变为(26x26x768)。
结合后的特征层再次进行5次卷积处理,一部分用于YoloHead获得预测结果,另外一部分用于上采样后与(52x52x256)特征层进行结合,特征层的shape变为(52x52x384)。
结合特征层再次进行5次卷积处理,处理完后就用于YoloHead获得预测结果。
YoloHead获得预测结果
经过上面FPN特征金字塔的加强特征提取,获取了三个加强特征,它们就是图4中的红框部分,这三个加强特征的shape分别为(13,13,512)、(26,26,256)、(52,52,128),然后我们利用这三个shape的特征层传入Yolo Head获得预测结果。
Yolo Head在Yolo算法中通常由一个3x3卷积层和一个1x1卷积层组成。这种结构的设计是为了在特征整合和通道调整之间实现平衡。
具体来说,3x3卷积层在空间上对特征图进行处理,以整合不同位置的信息,提取更高级的特征表示。而1x1卷积层则主要用于调整特征图的通道数,以适应后续处理和预测的需要。
对于预测结果的输出层,其形状(shape)可以根据所使用的数据集和先验框的数量而有所不同。在VOC数据集上,YoloV3针对每个特征点存在3个先验框,因此输出的通道数为3x25=75。所以对于三个特征层,它们的shape分别为(13,13,75),(26,26,75),(52,52,75)。
如果使用的是COCO训练集,其中类别数量为80,那么输出的通道数将为3x85=255。因此,对应三个特征层的shape将变为(13,13,255),(26,26,255),(52,52,255)。
使用pytorch实现FPN特征金字塔和YoloHead
from collections import OrderedDict
import torch
import torch.nn as nn
from yolo3.nets.darknet import darknet53
def conv2d(filter_in, filter_out, kernel_size):
"""
conv2d代替池化层
:param filter_in: 输入通道数
:param filter_out: 输出通道数
:param kernel_size: 卷积核大小
:return: 卷积块,包含卷积层、BN层和激活层
"""
pad = (kernel_size - 1) // 2 if kernel_size else 0
return nn.Sequential(OrderedDict([
("conv", nn.Conv2d(filter_in, filter_out, kernel_size=kernel_size, stride=1, padding=pad, bias=False)),
("bn", nn.BatchNorm2d(filter_out)),
("relu", nn.LeakyReLU(0.1)),
]))
def make_last_layers(filters_list, in_filters, out_filter):
"""
FPN金字塔特征提取
前5个卷积层是用于特征提取:
conv1:减小通道数
conv2:使用3x3卷积核提取特征
conv3:再次减小通道数
conv4:继续使用3x3卷积核提取特征
conv5:进一步减小通道数
这几层卷积的作用是聚集和提炼前面网络层输出的特征。
后2个卷积层是用于获得最终的预测结果:
conv6:使用3x3卷积核提取特征
conv7:使用1x1卷积核进行分类预测,输出通道数等于类别数
"""
m = nn.Sequential(
conv2d(in_filters, filters_list[0], 1),
conv2d(filters_list[0], filters_list[1], 3),
conv2d(filters_list[1], filters_list[0], 1),
conv2d(filters_list[0], filters_list[1], 3),
conv2d(filters_list[1], filters_list[0], 1),
conv2d(filters_list[0], filters_list[1], 3),
nn.Conv2d(filters_list[1], out_filter, kernel_size=1, stride=1, padding=0, bias=True)
)
return m
class YoloBody(nn.Module):
def __init__(self, anchors_mask, num_classes, pretrained = False):
super(YoloBody, self).__init__()
#---------------------------------------------------#
# 生成darknet53的主干模型,获得三个有效特征层,他们的shape分别是:
# 52,52,256
# 26,26,512
# 13,13,1024
# 实际就是前向传播当中的 out3, out4, out5
#---------------------------------------------------#
self.backbone = darknet53(pretrained=pretrained)
#---------------------------------------------------#
# out_filters : [64, 128, 256, 512, 1024]
#---------------------------------------------------#
out_filters = self.backbone.layers_out_filters
#------------------------------------------------------------------------#
# 计算yolo_head的输出通道数,对于voc数据集而言(类别20),每个特征层预测3个边界框
# final_out_filter0 = final_out_filter1 = final_out_filter2 = 3*(20+5) = 75
# 对于coco数据集而言
# final_out_filter0 = final_out_filter1 = final_out_filter2 = 3*(80+5) = 255
#------------------------------------------------------------------------#
self.last_layer0 = make_last_layers([512, 1024], out_filters[-1], len(anchors_mask[0]) * (num_classes + 5))
self.last_layer1_conv = conv2d(512, 256, 1)
self.last_layer1_upsample = nn.Upsample(scale_factor=2, mode='nearest')
self.last_layer1 = make_last_layers([256, 512], out_filters[-2] + 256, len(anchors_mask[1]) * (num_classes + 5))
self.last_layer2_conv = conv2d(256, 128, 1)
self.last_layer2_upsample = nn.Upsample(scale_factor=2, mode='nearest')
self.last_layer2 = make_last_layers([128, 256], out_filters[-3] + 128, len(anchors_mask[2]) * (num_classes + 5))
def forward(self, x):
#---------------------------------------------------#
# 获得三个有效特征层,他们的shape分别是:
# 52,52,256;26,26,512;13,13,1024
#---------------------------------------------------#
x2, x1, x0 = self.backbone(x)
#---------------------------------------------------#
# 第一个特征层
# out0 = (batch_size,final_out_filter0(255),13,13)
#---------------------------------------------------#
# 13,13,1024 -> 13,13,512 -> 13,13,1024 -> 13,13,512 -> 13,13,1024 -> 13,13,512
# 对前五个卷积层进行特征提取,后面的层进行预测输出
out0_branch = self.last_layer0[:5](x0)
out0 = self.last_layer0[5:](out0_branch)
# 13,13,512 -> 13,13,256 -> 26,26,256
x1_in = self.last_layer1_conv(out0_branch)
x1_in = self.last_layer1_upsample(x1_in)
# 26,26,256 + 26,26,512 -> 26,26,768
x1_in = torch.cat([x1_in, x1], 1)
#---------------------------------------------------#
# 第二个特征层
# out1 = (batch_size,255,26,26)
#---------------------------------------------------#
# 26,26,768 -> 26,26,256 -> 26,26,512 -> 26,26,256 -> 26,26,512 -> 26,26,256
out1_branch = self.last_layer1[:5](x1_in)
out1 = self.last_layer1[5:](out1_branch)
# 26,26,256 -> 26,26,128 -> 52,52,128
x2_in = self.last_layer2_conv(out1_branch)
x2_in = self.last_layer2_upsample(x2_in)
# 52,52,128 + 52,52,256 -> 52,52,384
x2_in = torch.cat([x2_in, x2], 1)
#---------------------------------------------------#
# 第一个特征层
# out3 = (batch_size,255,52,52)
#---------------------------------------------------#
# 52,52,384 -> 52,52,128 -> 52,52,256 -> 52,52,128 -> 52,52,256 -> 52,52,128
out2 = self.last_layer2(x2_in)
return out0, out1, out2代码中写的注释很详细,对着网络图4结合着看就能明白了。
对Yolo模型预测结果的解码
voc举例
接下来是对voc为例,分类有20种
我们可以获得三个特征层的预测结果,shape分别为:
- (N,13,13,75)
- (N,26,26,75)
- (N,52,52,75)
在前面我们也了解过了目标检测YOLO算法,先从yolov1开始_夏天是冰红茶的博客-CSDN博客
拿第一个特征层举例,我们是将图像分割成了13x13的网格在每个网格中心建立先验框,这些是我们预先设定好的,网络的预测结果会判断这些框内是否包含物体,以及这个物体的种类。
每一个网格点都具有三个先验框,所以上述的预测结果可以reshape为:
- (N,13,13,3,25)
- (N,26,26,3,25)
- (N,52,52,3,25)
这里的25是这样组成的:
首先你会得到5个信息[x,y,w,h,c],即为4+1+20,其中的4代表先验框的调整参数,1代表置信度,20代表的是这个先验框的种类。如果YoloV3只检测3类物体,那么这个85就变为了4+1+3 = 8。
根据先验框的信息就可以得到预测框。
在得到最终的预测框坐标和置信度后,还需要进行进一步的处理来生成最终检测结果:
-
对每个类别进行后处理
-
对该类进行置信度筛选,取出置信度大于阈值obj_threshold的预测框
-
对保留下来的预测框按照置信度排序
-
进行非极大抑制(NMS)
取出置信度最高的框,作为保留框,计算其余框与该框的IOU重合度,移除重合度大于nms_thres的框 -
重复上述步骤,直到所有框都检测过
-
合并每个类别的结果
上述步骤确保了对每个类别都进行置信度筛选和NMS处理,可以有效去除冗余和重复的检测框,提高检测精度。
这套流程是目标检测任务的标准后处理方式,Yolo也遵循这样的流程,只是在详细实现上会有不同。但整体思路都是类似的,这对理解任何检测模型的结果产生过程都是很重要的。
代码参数讲解
上面说得可能比较的浅显,还是要结合着代码来讲:
anchors
先说说什么是anchors,它是 yolo 模型中先验检测边界框的尺寸和形状。
13x13的特征层对应的anchor是[116,90],[156,198],[373,326]
26x26的特征层对应的anchor是[30,61],[62,45],[59,119]
52x52的特征层对应的anchor是[10,13],[16,30],[33,23]先整体来看看这三个特征层,13x13特征层的感受野较大,一般用来检测大尺寸的目标,26x26特征层,感受野中等,用于检测中等大小目标,52x52特征层,感受野最小,用于检测小尺寸目标。所以这样看来它们所对应的anchor也是从较大到较小,这个值呢其实是研究人员通过不断试验比较,才确定出对特定模型和数据集效果较好的anchors设定。
咱们如果是初学者就最好不要去修改它了,你就默认它是这样就好了,因为要修改的话,不考虑效果如何,光是消耗的资源和时间就不值得了
anchors_mask
接着就是anchors_mask,它用于定义不同特征层对应哪些anchors先验框,Yolo通常有3个特征层,每个特征层需要选择一些anchors来生成检测框。anchors_mask就定义了这种映射关系。
举例anchors_mask = [[6,7,8], [3,4,5], [0,1,2]]
- 第一个特征层使用 anchors 中第[6,7,8]个先验框
- 第二个特征层使用 anchors 中第[3,4,5]个先验框
- 第三个特征层使用 anchors 中第[0,1,2]个先验框
这样每个特征层就分配到了合适的anchors,用于生成不同尺寸的检测框。在网络预测时,根据anchors_mask可以将预测映射到对应特征层的anchors上,进行解码和后处理。
scaled_anchors
这一步是将预设的先验框(anchors)调整到当前特征层的尺度下,anchors 是相对于原图的绝对尺寸,而特征层进行了下采样,所以需要根据特征层的步长对 anchors 进行尺度转换,得到 scaled_anchors,如果不进行缩放,直接应用anchors会引起预测与实际目标的坐标偏差。
对预测进行解码的代码
import torch
from torchvision.ops import nms
import numpy as np
class DecodeBox():
def __init__(self, anchors, num_classes, input_shape, anchors_mask = [[6,7,8], [3,4,5], [0,1,2]]):
"""
13x13的特征层对应的anchor是[116,90],[156,198],[373,326]
26x26的特征层对应的anchor是[30,61],[62,45],[59,119]
52x52的特征层对应的anchor是[10,13],[16,30],[33,23]
:param anchors: 先验框,对应不同特征层的大小
:param num_classes: 分类数量
:param input_shape: 输入图像尺寸
:param anchors_mask: 对应三个特征层的先验框掩码
"""
super(DecodeBox, self).__init__()
self.anchors = anchors
self.num_classes = num_classes
self.bbox_attrs = 5 + num_classes # bbox属性的数量
self.input_shape = input_shape
self.anchors_mask = anchors_mask
def decode_box(self, inputs):
outputs = []
for i, input in enumerate(inputs):
#-----------------------------------------------#
# 输入的input一共有三个,他们的shape分别是
# batch_size, 255, 13, 13
# batch_size, 255, 26, 26
# batch_size, 255, 52, 52
#-----------------------------------------------#
batch_size,input_height,input_width = input.size(0),input.size(2),input.size(3)
#-----------------------------------------------#
# 输入为416x416时
# stride_h = stride_w = 32、16、8
#-----------------------------------------------#
stride_h = self.input_shape[0] / input_height
stride_w = self.input_shape[1] / input_width
#-------------------------------------------------#
# 此时获得的scaled_anchors大小是相对于特征层的
#-------------------------------------------------#
scaled_anchors = [(anchor_width / stride_w, anchor_height / stride_h) for anchor_width, anchor_height in self.anchors[self.anchors_mask[i]]]
#-----------------------------------------------#
# 输入的input一共有三个,他们的shape分别是
# batch_size, 3, 13, 13, 85
# batch_size, 3, 26, 26, 85
# batch_size, 3, 52, 52, 85
#-----------------------------------------------#
prediction = input.view(batch_size, len(self.anchors_mask[i]),
self.bbox_attrs, input_height, input_width).permute(0, 1, 3, 4, 2).contiguous()
#-----------------------------------------------#
# 先验框的中心位置的调整参数
#-----------------------------------------------#
x = torch.sigmoid(prediction[..., 0])
y = torch.sigmoid(prediction[..., 1])
#-----------------------------------------------#
# 先验框的宽高调整参数
#-----------------------------------------------#
w = prediction[..., 2]
h = prediction[..., 3]
#-----------------------------------------------#
# 获得置信度,是否有物体
#-----------------------------------------------#
conf = torch.sigmoid(prediction[..., 4])
#-----------------------------------------------#
# 种类置信度
#-----------------------------------------------#
pred_cls = torch.sigmoid(prediction[..., 5:])
FloatTensor = torch.cuda.FloatTensor if x.is_cuda else torch.FloatTensor
LongTensor = torch.cuda.LongTensor if x.is_cuda else torch.LongTensor
#----------------------------------------------------------#
# 生成网格,先验框中心,网格左上角
# batch_size,3,13,13
#----------------------------------------------------------#
grid_x = torch.linspace(0, input_width - 1, input_width).repeat(input_height, 1).repeat(
batch_size * len(self.anchors_mask[i]), 1, 1).view(x.shape).type(FloatTensor)
grid_y = torch.linspace(0, input_height - 1, input_height).repeat(input_width, 1).t().repeat(
batch_size * len(self.anchors_mask[i]), 1, 1).view(y.shape).type(FloatTensor)
#----------------------------------------------------------#
# 按照网格格式生成先验框的宽高
# batch_size,3,13,13
#----------------------------------------------------------#
anchor_w = FloatTensor(scaled_anchors).index_select(1, LongTensor([0]))
anchor_h = FloatTensor(scaled_anchors).index_select(1, LongTensor([1]))
anchor_w = anchor_w.repeat(batch_size, 1).repeat(1, 1, input_height * input_width).view(w.shape)
anchor_h = anchor_h.repeat(batch_size, 1).repeat(1, 1, input_height * input_width).view(h.shape)
#----------------------------------------------------------#
# 利用预测结果对先验框进行调整
# 首先调整先验框的中心,从先验框中心向右下角偏移
# 再调整先验框的宽高。
#----------------------------------------------------------#
pred_boxes = FloatTensor(prediction[..., :4].shape)
pred_boxes[..., 0] = x.data + grid_x
pred_boxes[..., 1] = y.data + grid_y
pred_boxes[..., 2] = torch.exp(w.data) * anchor_w
pred_boxes[..., 3] = torch.exp(h.data) * anchor_h
#----------------------------------------------------------#
# 将输出结果归一化成小数的形式
#----------------------------------------------------------#
_scale = torch.Tensor([input_width, input_height, input_width, input_height]).type(FloatTensor)
output = torch.cat((pred_boxes.view(batch_size, -1, 4) / _scale,
conf.view(batch_size, -1, 1), pred_cls.view(batch_size, -1, self.num_classes)), -1)
outputs.append(output.data)
return outputs
def yolo_correct_boxes(self, box_xy, box_wh, input_shape, image_shape, letterbox_image):
#-----------------------------------------------------------------#
# 把y轴放前面是因为方便预测框和图像的宽高进行相乘
#-----------------------------------------------------------------#
box_yx = box_xy[..., ::-1]
box_hw = box_wh[..., ::-1]
input_shape = np.array(input_shape)
image_shape = np.array(image_shape)
if letterbox_image:
#-----------------------------------------------------------------#
# 这里求出来的offset是图像有效区域相对于图像左上角的偏移情况
# new_shape指的是宽高缩放情况
#-----------------------------------------------------------------#
new_shape = np.round(image_shape * np.min(input_shape/image_shape))
offset = (input_shape - new_shape)/2./input_shape
scale = input_shape/new_shape
box_yx = (box_yx - offset) * scale
box_hw *= scale
box_mins = box_yx - (box_hw / 2.)
box_maxes = box_yx + (box_hw / 2.)
boxes = np.concatenate([box_mins[..., 0:1], box_mins[..., 1:2], box_maxes[..., 0:1], box_maxes[..., 1:2]], axis=-1)
boxes *= np.concatenate([image_shape, image_shape], axis=-1)
return boxes
def non_max_suppression(self, prediction, num_classes, input_shape, image_shape, letterbox_image, conf_thres=0.5, nms_thres=0.4):
#----------------------------------------------------------#
# 将预测结果的格式转换成左上角右下角的格式。
# prediction [batch_size, num_anchors, 85]
#----------------------------------------------------------#
box_corner = prediction.new(prediction.shape)
box_corner[:, :, 0] = prediction[:, :, 0] - prediction[:, :, 2] / 2
box_corner[:, :, 1] = prediction[:, :, 1] - prediction[:, :, 3] / 2
box_corner[:, :, 2] = prediction[:, :, 0] + prediction[:, :, 2] / 2
box_corner[:, :, 3] = prediction[:, :, 1] + prediction[:, :, 3] / 2
prediction[:, :, :4] = box_corner[:, :, :4]
output = [None for _ in range(len(prediction))]
for i, image_pred in enumerate(prediction):
#----------------------------------------------------------#
# 对种类预测部分取max。
# class_conf [num_anchors, 1] 种类置信度
# class_pred [num_anchors, 1] 种类
#----------------------------------------------------------#
class_conf, class_pred = torch.max(image_pred[:, 5:5 + num_classes], 1, keepdim=True)
#----------------------------------------------------------#
# 利用置信度进行第一轮筛选
#----------------------------------------------------------#
conf_mask = (image_pred[:, 4] * class_conf[:, 0] >= conf_thres).squeeze()
#----------------------------------------------------------#
# 根据置信度进行预测结果的筛选
#----------------------------------------------------------#
image_pred = image_pred[conf_mask]
class_conf = class_conf[conf_mask]
class_pred = class_pred[conf_mask]
if not image_pred.size(0):
continue
#-------------------------------------------------------------------------#
# detections [num_anchors, 7]
# 7的内容为:x1, y1, x2, y2, obj_conf, class_conf, class_pred
#-------------------------------------------------------------------------#
detections = torch.cat((image_pred[:, :5], class_conf.float(), class_pred.float()), 1)
#------------------------------------------#
# 获得预测结果中包含的所有种类
#------------------------------------------#
unique_labels = detections[:, -1].cpu().unique()
if prediction.is_cuda:
unique_labels = unique_labels.cuda()
detections = detections.cuda()
for c in unique_labels:
#------------------------------------------#
# 获得某一类得分筛选后全部的预测结果
#------------------------------------------#
detections_class = detections[detections[:, -1] == c]
#------------------------------------------#
# 使用官方自带的非极大抑制会速度更快一些!
#------------------------------------------#
keep = nms(
detections_class[:, :4],
detections_class[:, 4] * detections_class[:, 5],
nms_thres
)
max_detections = detections_class[keep]
# Add max detections to outputs
output[i] = max_detections if output[i] is None else torch.cat((output[i], max_detections))
if output[i] is not None:
output[i] = output[i].cpu().numpy()
box_xy, box_wh = (output[i][:, 0:2] + output[i][:, 2:4])/2, output[i][:, 2:4] - output[i][:, 0:2]
output[i][:, :4] = self.yolo_correct_boxes(box_xy, box_wh, input_shape, image_shape, letterbox_image)
return output
模型训练的loss
YOLO模型的损失函数包含以下3部分损失:
1、坐标损失loss_loc
用于回归预测框和真实框之间的距离,包含框中心坐标、宽高等的损失。可以使用GIoU损失或者传统的L1、L2损失。
2、置信度损失loss_conf
用于判断预测框是否包含对象,预测框是否应该被禁用的二分类损失,使用BCELoss计算。
3、类别损失loss_cls
用于预测框包含的物体类别分类损失,也使用BCELoss计算。
最后将三部分损失进行求和,构成最终的YOLO模型损失函数loss。
坐标损失和置信度损失关注预测框的定位精度,类别损失关注特征提取和分类的效果。三者组合可以联合优化检测模型的不同能力。
import math
from functools import partial
import numpy as np
import torch
import torch.nn as nn
class YOLOLoss(nn.Module):
def __init__(self, anchors, num_classes, input_shape, cuda, anchors_mask = [[6,7,8], [3,4,5], [0,1,2]]):
super(YOLOLoss, self).__init__()
#-----------------------------------------------------------#
# 13x13的特征层对应的anchor是[116,90],[156,198],[373,326]
# 26x26的特征层对应的anchor是[30,61],[62,45],[59,119]
# 52x52的特征层对应的anchor是[10,13],[16,30],[33,23]
#-----------------------------------------------------------#
self.anchors = anchors
self.num_classes = num_classes
self.bbox_attrs = 5 + num_classes
self.input_shape = input_shape
self.anchors_mask = anchors_mask
self.giou = True
self.balance = [0.4, 1.0, 4]
self.box_ratio = 0.05
self.obj_ratio = 5 * (input_shape[0] * input_shape[1]) / (416 ** 2)
self.cls_ratio = 1 * (num_classes / 80)
self.ignore_threshold = 0.5
self.cuda = cuda
def clip_by_tensor(self, t, t_min, t_max):
t = t.float()
result = (t >= t_min).float() * t + (t < t_min).float() * t_min
result = (result <= t_max).float() * result + (result > t_max).float() * t_max
return result
def MSELoss(self, pred, target):
return torch.pow(pred - target, 2)
def BCELoss(self, pred, target):
epsilon = 1e-7
pred = self.clip_by_tensor(pred, epsilon, 1.0 - epsilon)
output = - target * torch.log(pred) - (1.0 - target) * torch.log(1.0 - pred)
return output
def box_giou(self, b1, b2):
"""
输入为:
----------
b1: tensor, shape=(batch, feat_w, feat_h, anchor_num, 4), xywh
b2: tensor, shape=(batch, feat_w, feat_h, anchor_num, 4), xywh
返回为:
-------
giou: tensor, shape=(batch, feat_w, feat_h, anchor_num, 1)
"""
#----------------------------------------------------#
# 求出预测框左上角右下角
#----------------------------------------------------#
b1_xy = b1[..., :2]
b1_wh = b1[..., 2:4]
b1_wh_half = b1_wh/2.
b1_mins = b1_xy - b1_wh_half
b1_maxes = b1_xy + b1_wh_half
#----------------------------------------------------#
# 求出真实框左上角右下角
#----------------------------------------------------#
b2_xy = b2[..., :2]
b2_wh = b2[..., 2:4]
b2_wh_half = b2_wh/2.
b2_mins = b2_xy - b2_wh_half
b2_maxes = b2_xy + b2_wh_half
#----------------------------------------------------#
# 求真实框和预测框所有的iou
#----------------------------------------------------#
intersect_mins = torch.max(b1_mins, b2_mins)
intersect_maxes = torch.min(b1_maxes, b2_maxes)
intersect_wh = torch.max(intersect_maxes - intersect_mins, torch.zeros_like(intersect_maxes))
intersect_area = intersect_wh[..., 0] * intersect_wh[..., 1]
b1_area = b1_wh[..., 0] * b1_wh[..., 1]
b2_area = b2_wh[..., 0] * b2_wh[..., 1]
union_area = b1_area + b2_area - intersect_area
iou = intersect_area / union_area
#----------------------------------------------------#
# 找到包裹两个框的最小框的左上角和右下角
#----------------------------------------------------#
enclose_mins = torch.min(b1_mins, b2_mins)
enclose_maxes = torch.max(b1_maxes, b2_maxes)
enclose_wh = torch.max(enclose_maxes - enclose_mins, torch.zeros_like(intersect_maxes))
#----------------------------------------------------#
# 计算对角线距离
#----------------------------------------------------#
enclose_area = enclose_wh[..., 0] * enclose_wh[..., 1]
giou = iou - (enclose_area - union_area) / enclose_area
return giou
def forward(self, l, input, targets=None):
#----------------------------------------------------#
# l代表的是,当前输入进来的有效特征层,是第几个有效特征层
# input的shape为 bs, 3*(5+num_classes), 13, 13
# bs, 3*(5+num_classes), 26, 26
# bs, 3*(5+num_classes), 52, 52
# targets代表的是真实框。
#----------------------------------------------------#
#--------------------------------#
# 获得图片数量,特征层的高和宽
# 13和13
#--------------------------------#
bs = input.size(0)
in_h = input.size(2)
in_w = input.size(3)
#-----------------------------------------------------------------------#
# 计算步长
# 每一个特征点对应原来的图片上多少个像素点
# 如果特征层为13x13的话,一个特征点就对应原来的图片上的32个像素点
# 如果特征层为26x26的话,一个特征点就对应原来的图片上的16个像素点
# 如果特征层为52x52的话,一个特征点就对应原来的图片上的8个像素点
# stride_h = stride_w = 32、16、8
# stride_h和stride_w都是32。
#-----------------------------------------------------------------------#
stride_h = self.input_shape[0] / in_h
stride_w = self.input_shape[1] / in_w
#-------------------------------------------------#
# 此时获得的scaled_anchors大小是相对于特征层的
#-------------------------------------------------#
scaled_anchors = [(a_w / stride_w, a_h / stride_h) for a_w, a_h in self.anchors]
#-----------------------------------------------#
# 输入的input一共有三个,他们的shape分别是
# bs, 3*(5+num_classes), 13, 13 => batch_size, 3, 13, 13, 5 + num_classes
# batch_size, 3, 26, 26, 5 + num_classes
# batch_size, 3, 52, 52, 5 + num_classes
#-----------------------------------------------#
prediction = input.view(bs, len(self.anchors_mask[l]), self.bbox_attrs, in_h, in_w).permute(0, 1, 3, 4, 2).contiguous()
#-----------------------------------------------#
# 先验框的中心位置的调整参数
#-----------------------------------------------#
x = torch.sigmoid(prediction[..., 0])
y = torch.sigmoid(prediction[..., 1])
#-----------------------------------------------#
# 先验框的宽高调整参数
#-----------------------------------------------#
w = prediction[..., 2]
h = prediction[..., 3]
#-----------------------------------------------#
# 获得置信度,是否有物体
#-----------------------------------------------#
conf = torch.sigmoid(prediction[..., 4])
#-----------------------------------------------#
# 种类置信度
#-----------------------------------------------#
pred_cls = torch.sigmoid(prediction[..., 5:])
#-----------------------------------------------#
# 获得网络应该有的预测结果
#-----------------------------------------------#
y_true, noobj_mask, box_loss_scale = self.get_target(l, targets, scaled_anchors, in_h, in_w)
#---------------------------------------------------------------#
# 将预测结果进行解码,判断预测结果和真实值的重合程度
# 如果重合程度过大则忽略,因为这些特征点属于预测比较准确的特征点
# 作为负样本不合适
#----------------------------------------------------------------#
noobj_mask, pred_boxes = self.get_ignore(l, x, y, h, w, targets, scaled_anchors, in_h, in_w, noobj_mask)
if self.cuda:
y_true = y_true.type_as(x)
noobj_mask = noobj_mask.type_as(x)
box_loss_scale = box_loss_scale.type_as(x)
#--------------------------------------------------------------------------#
# box_loss_scale是真实框宽高的乘积,宽高均在0-1之间,因此乘积也在0-1之间。
# 2-宽高的乘积代表真实框越大,比重越小,小框的比重更大。
#--------------------------------------------------------------------------#
box_loss_scale = 2 - box_loss_scale
loss = 0
obj_mask = y_true[..., 4] == 1
n = torch.sum(obj_mask)
if n != 0:
if self.giou:
#---------------------------------------------------------------#
# 计算预测结果和真实结果的giou
#----------------------------------------------------------------#
giou = self.box_giou(pred_boxes, y_true[..., :4]).type_as(x)
loss_loc = torch.mean((1 - giou)[obj_mask])
else:
#-----------------------------------------------------------#
# 计算中心偏移情况的loss,使用BCELoss效果好一些
#-----------------------------------------------------------#
loss_x = torch.mean(self.BCELoss(x[obj_mask], y_true[..., 0][obj_mask]) * box_loss_scale[obj_mask])
loss_y = torch.mean(self.BCELoss(y[obj_mask], y_true[..., 1][obj_mask]) * box_loss_scale[obj_mask])
#-----------------------------------------------------------#
# 计算宽高调整值的loss
#-----------------------------------------------------------#
loss_w = torch.mean(self.MSELoss(w[obj_mask], y_true[..., 2][obj_mask]) * box_loss_scale[obj_mask])
loss_h = torch.mean(self.MSELoss(h[obj_mask], y_true[..., 3][obj_mask]) * box_loss_scale[obj_mask])
loss_loc = (loss_x + loss_y + loss_h + loss_w) * 0.1
loss_cls = torch.mean(self.BCELoss(pred_cls[obj_mask], y_true[..., 5:][obj_mask]))
loss += loss_loc * self.box_ratio + loss_cls * self.cls_ratio
loss_conf = torch.mean(self.BCELoss(conf, obj_mask.type_as(conf))[noobj_mask.bool() | obj_mask])
loss += loss_conf * self.balance[l] * self.obj_ratio
# if n != 0:
# print(loss_loc * self.box_ratio, loss_cls * self.cls_ratio, loss_conf * self.balance[l] * self.obj_ratio)
return loss
def calculate_iou(self, _box_a, _box_b):
#-----------------------------------------------------------#
# 计算真实框的左上角和右下角
#-----------------------------------------------------------#
b1_x1, b1_x2 = _box_a[:, 0] - _box_a[:, 2] / 2, _box_a[:, 0] + _box_a[:, 2] / 2
b1_y1, b1_y2 = _box_a[:, 1] - _box_a[:, 3] / 2, _box_a[:, 1] + _box_a[:, 3] / 2
#-----------------------------------------------------------#
# 计算先验框获得的预测框的左上角和右下角
#-----------------------------------------------------------#
b2_x1, b2_x2 = _box_b[:, 0] - _box_b[:, 2] / 2, _box_b[:, 0] + _box_b[:, 2] / 2
b2_y1, b2_y2 = _box_b[:, 1] - _box_b[:, 3] / 2, _box_b[:, 1] + _box_b[:, 3] / 2
#-----------------------------------------------------------#
# 将真实框和预测框都转化成左上角右下角的形式
#-----------------------------------------------------------#
box_a = torch.zeros_like(_box_a)
box_b = torch.zeros_like(_box_b)
box_a[:, 0], box_a[:, 1], box_a[:, 2], box_a[:, 3] = b1_x1, b1_y1, b1_x2, b1_y2
box_b[:, 0], box_b[:, 1], box_b[:, 2], box_b[:, 3] = b2_x1, b2_y1, b2_x2, b2_y2
#-----------------------------------------------------------#
# A为真实框的数量,B为先验框的数量
#-----------------------------------------------------------#
A = box_a.size(0)
B = box_b.size(0)
#-----------------------------------------------------------#
# 计算交的面积
#-----------------------------------------------------------#
max_xy = torch.min(box_a[:, 2:].unsqueeze(1).expand(A, B, 2), box_b[:, 2:].unsqueeze(0).expand(A, B, 2))
min_xy = torch.max(box_a[:, :2].unsqueeze(1).expand(A, B, 2), box_b[:, :2].unsqueeze(0).expand(A, B, 2))
inter = torch.clamp((max_xy - min_xy), min=0)
inter = inter[:, :, 0] * inter[:, :, 1]
#-----------------------------------------------------------#
# 计算预测框和真实框各自的面积
#-----------------------------------------------------------#
area_a = ((box_a[:, 2]-box_a[:, 0]) * (box_a[:, 3]-box_a[:, 1])).unsqueeze(1).expand_as(inter) # [A,B]
area_b = ((box_b[:, 2]-box_b[:, 0]) * (box_b[:, 3]-box_b[:, 1])).unsqueeze(0).expand_as(inter) # [A,B]
#-----------------------------------------------------------#
# 求IOU
#-----------------------------------------------------------#
union = area_a + area_b - inter
return inter / union # [A,B]
def get_target(self, l, targets, anchors, in_h, in_w):
#-----------------------------------------------------#
# 计算一共有多少张图片
#-----------------------------------------------------#
bs = len(targets)
#-----------------------------------------------------#
# 用于选取哪些先验框不包含物体
#-----------------------------------------------------#
noobj_mask = torch.ones(bs, len(self.anchors_mask[l]), in_h, in_w, requires_grad = False)
#-----------------------------------------------------#
# 让网络更加去关注小目标
#-----------------------------------------------------#
box_loss_scale = torch.zeros(bs, len(self.anchors_mask[l]), in_h, in_w, requires_grad = False)
#-----------------------------------------------------#
# batch_size, 3, 13, 13, 5 + num_classes
#-----------------------------------------------------#
y_true = torch.zeros(bs, len(self.anchors_mask[l]), in_h, in_w, self.bbox_attrs, requires_grad = False)
for b in range(bs):
if len(targets[b])==0:
continue
batch_target = torch.zeros_like(targets[b])
#-------------------------------------------------------#
# 计算出正样本在特征层上的中心点
#-------------------------------------------------------#
batch_target[:, [0,2]] = targets[b][:, [0,2]] * in_w
batch_target[:, [1,3]] = targets[b][:, [1,3]] * in_h
batch_target[:, 4] = targets[b][:, 4]
batch_target = batch_target.cpu()
#-------------------------------------------------------#
# 将真实框转换一个形式
# num_true_box, 4
#-------------------------------------------------------#
gt_box = torch.FloatTensor(torch.cat((torch.zeros((batch_target.size(0), 2)), batch_target[:, 2:4]), 1))
#-------------------------------------------------------#
# 将先验框转换一个形式
# 9, 4
#-------------------------------------------------------#
anchor_shapes = torch.FloatTensor(torch.cat((torch.zeros((len(anchors), 2)), torch.FloatTensor(anchors)), 1))
#-------------------------------------------------------#
# 计算交并比
# self.calculate_iou(gt_box, anchor_shapes) = [num_true_box, 9]每一个真实框和9个先验框的重合情况
# best_ns:
# [每个真实框最大的重合度max_iou, 每一个真实框最重合的先验框的序号]
#-------------------------------------------------------#
best_ns = torch.argmax(self.calculate_iou(gt_box, anchor_shapes), dim=-1)
for t, best_n in enumerate(best_ns):
if best_n not in self.anchors_mask[l]:
continue
#----------------------------------------#
# 判断这个先验框是当前特征点的哪一个先验框
#----------------------------------------#
k = self.anchors_mask[l].index(best_n)
#----------------------------------------#
# 获得真实框属于哪个网格点
#----------------------------------------#
i = torch.floor(batch_target[t, 0]).long()
j = torch.floor(batch_target[t, 1]).long()
#----------------------------------------#
# 取出真实框的种类
#----------------------------------------#
c = batch_target[t, 4].long()
#----------------------------------------#
# noobj_mask代表无目标的特征点
#----------------------------------------#
noobj_mask[b, k, j, i] = 0
#----------------------------------------#
# tx、ty代表中心调整参数的真实值
#----------------------------------------#
if not self.giou:
#----------------------------------------#
# tx、ty代表中心调整参数的真实值
#----------------------------------------#
y_true[b, k, j, i, 0] = batch_target[t, 0] - i.float()
y_true[b, k, j, i, 1] = batch_target[t, 1] - j.float()
y_true[b, k, j, i, 2] = math.log(batch_target[t, 2] / anchors[best_n][0])
y_true[b, k, j, i, 3] = math.log(batch_target[t, 3] / anchors[best_n][1])
y_true[b, k, j, i, 4] = 1
y_true[b, k, j, i, c + 5] = 1
else:
#----------------------------------------#
# tx、ty代表中心调整参数的真实值
#----------------------------------------#
y_true[b, k, j, i, 0] = batch_target[t, 0]
y_true[b, k, j, i, 1] = batch_target[t, 1]
y_true[b, k, j, i, 2] = batch_target[t, 2]
y_true[b, k, j, i, 3] = batch_target[t, 3]
y_true[b, k, j, i, 4] = 1
y_true[b, k, j, i, c + 5] = 1
#----------------------------------------#
# 用于获得xywh的比例
# 大目标loss权重小,小目标loss权重大
#----------------------------------------#
box_loss_scale[b, k, j, i] = batch_target[t, 2] * batch_target[t, 3] / in_w / in_h
return y_true, noobj_mask, box_loss_scale
def get_ignore(self, l, x, y, h, w, targets, scaled_anchors, in_h, in_w, noobj_mask):
#-----------------------------------------------------#
# 计算一共有多少张图片
#-----------------------------------------------------#
bs = len(targets)
#-----------------------------------------------------#
# 生成网格,先验框中心,网格左上角
#-----------------------------------------------------#
grid_x = torch.linspace(0, in_w - 1, in_w).repeat(in_h, 1).repeat(
int(bs * len(self.anchors_mask[l])), 1, 1).view(x.shape).type_as(x)
grid_y = torch.linspace(0, in_h - 1, in_h).repeat(in_w, 1).t().repeat(
int(bs * len(self.anchors_mask[l])), 1, 1).view(y.shape).type_as(x)
# 生成先验框的宽高
scaled_anchors_l = np.array(scaled_anchors)[self.anchors_mask[l]]
anchor_w = torch.Tensor(scaled_anchors_l).index_select(1, torch.LongTensor([0])).type_as(x)
anchor_h = torch.Tensor(scaled_anchors_l).index_select(1, torch.LongTensor([1])).type_as(x)
anchor_w = anchor_w.repeat(bs, 1).repeat(1, 1, in_h * in_w).view(w.shape)
anchor_h = anchor_h.repeat(bs, 1).repeat(1, 1, in_h * in_w).view(h.shape)
#-------------------------------------------------------#
# 计算调整后的先验框中心与宽高
#-------------------------------------------------------#
pred_boxes_x = torch.unsqueeze(x + grid_x, -1)
pred_boxes_y = torch.unsqueeze(y + grid_y, -1)
pred_boxes_w = torch.unsqueeze(torch.exp(w) * anchor_w, -1)
pred_boxes_h = torch.unsqueeze(torch.exp(h) * anchor_h, -1)
pred_boxes = torch.cat([pred_boxes_x, pred_boxes_y, pred_boxes_w, pred_boxes_h], dim = -1)
for b in range(bs):
#-------------------------------------------------------#
# 将预测结果转换一个形式
# pred_boxes_for_ignore num_anchors, 4
#-------------------------------------------------------#
pred_boxes_for_ignore = pred_boxes[b].view(-1, 4)
#-------------------------------------------------------#
# 计算真实框,并把真实框转换成相对于特征层的大小
# gt_box num_true_box, 4
#-------------------------------------------------------#
if len(targets[b]) > 0:
batch_target = torch.zeros_like(targets[b])
#-------------------------------------------------------#
# 计算出正样本在特征层上的中心点
#-------------------------------------------------------#
batch_target[:, [0,2]] = targets[b][:, [0,2]] * in_w
batch_target[:, [1,3]] = targets[b][:, [1,3]] * in_h
batch_target = batch_target[:, :4].type_as(x)
#-------------------------------------------------------#
# 计算交并比
# anch_ious num_true_box, num_anchors
#-------------------------------------------------------#
anch_ious = self.calculate_iou(batch_target, pred_boxes_for_ignore)
#-------------------------------------------------------#
# 每个先验框对应真实框的最大重合度
# anch_ious_max num_anchors
#-------------------------------------------------------#
anch_ious_max, _ = torch.max(anch_ious, dim = 0)
anch_ious_max = anch_ious_max.view(pred_boxes[b].size()[:3])
noobj_mask[b][anch_ious_max > self.ignore_threshold] = 0
return noobj_mask, pred_boxes
def weights_init(net, init_type='normal', init_gain = 0.02):
def init_func(m):
classname = m.__class__.__name__
if hasattr(m, 'weight') and classname.find('Conv') != -1:
if init_type == 'normal':
torch.nn.init.normal_(m.weight.data, 0.0, init_gain)
elif init_type == 'xavier':
torch.nn.init.xavier_normal_(m.weight.data, gain=init_gain)
elif init_type == 'kaiming':
torch.nn.init.kaiming_normal_(m.weight.data, a=0, mode='fan_in')
elif init_type == 'orthogonal':
torch.nn.init.orthogonal_(m.weight.data, gain=init_gain)
else:
raise NotImplementedError('initialization method [%s] is not implemented' % init_type)
elif classname.find('BatchNorm2d') != -1:
torch.nn.init.normal_(m.weight.data, 1.0, 0.02)
torch.nn.init.constant_(m.bias.data, 0.0)
print('initialize network with %s type' % init_type)
net.apply(init_func)
def get_lr_scheduler(lr_decay_type, lr, min_lr, total_iters, warmup_iters_ratio = 0.05, warmup_lr_ratio = 0.1, no_aug_iter_ratio = 0.05, step_num = 10):
def yolox_warm_cos_lr(lr, min_lr, total_iters, warmup_total_iters, warmup_lr_start, no_aug_iter, iters):
if iters <= warmup_total_iters:
# lr = (lr - warmup_lr_start) * iters / float(warmup_total_iters) + warmup_lr_start
lr = (lr - warmup_lr_start) * pow(iters / float(warmup_total_iters), 2) + warmup_lr_start
elif iters >= total_iters - no_aug_iter:
lr = min_lr
else:
lr = min_lr + 0.5 * (lr - min_lr) * (
1.0 + math.cos(math.pi* (iters - warmup_total_iters) / (total_iters - warmup_total_iters - no_aug_iter))
)
return lr
def step_lr(lr, decay_rate, step_size, iters):
if step_size < 1:
raise ValueError("step_size must above 1.")
n = iters // step_size
out_lr = lr * decay_rate ** n
return out_lr
if lr_decay_type == "cos":
warmup_total_iters = min(max(warmup_iters_ratio * total_iters, 1), 3)
warmup_lr_start = max(warmup_lr_ratio * lr, 1e-6)
no_aug_iter = min(max(no_aug_iter_ratio * total_iters, 1), 15)
func = partial(yolox_warm_cos_lr ,lr, min_lr, total_iters, warmup_total_iters, warmup_lr_start, no_aug_iter)
else:
decay_rate = (min_lr / lr) ** (1 / (step_num - 1))
step_size = total_iters / step_num
func = partial(step_lr, lr, decay_rate, step_size)
return func
def set_optimizer_lr(optimizer, lr_scheduler_func, epoch):
lr = lr_scheduler_func(epoch)
for param_group in optimizer.param_groups:
param_group['lr'] = lr
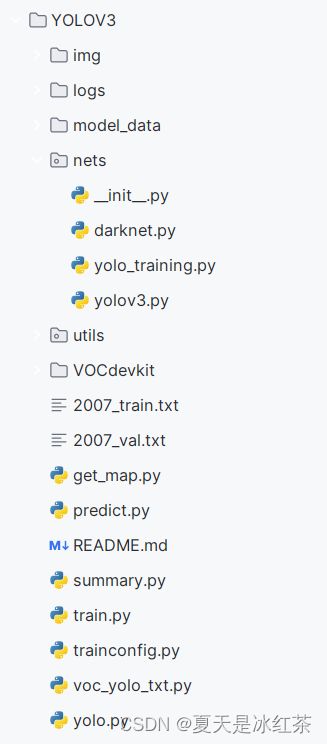
Yolov3代码的下载和使用
你可以通过Auorui/Yolov3-pytorch: Yolov3 (github.com)这里下载。
环境问题可以查看Readme文件:
Yolov3-pytorch/YOLOV3/README.md at main · Auorui/Yolov3-pytorch (github.com)
目录大致结构
其他参考文章
[1] yolov3网络(DarkNet53)结构详解以及Pytorch代码实现_darknet-53
[2] 目标检测YOLO算法,先从yolov1开始_夏天是冰红茶的博客-CSDN博客