数据结构(c++)学习笔记--向量
文章目录
- 一、抽象数据类型
-
- 1、接口与实现
- 2.从数组到向量
- 3.模板类
- 二、可扩充向量
-
- 1.算法
- 2.分摊
- 三、无序向量
-
- 1.元素访问
- 2.插入
- 3.区间删除
- 4.单元素删除
- 5.查找
- 6. 去重(唯一化)
- 7.遍历
- 四、有序向量
-
- 1.唯一化
- 2.二分查找A
- 3.Fibonacci查找
- 4.二分查找B
- 5.二分查找C
- 6.插值查找
- 五、起泡排序
-
- 1.构思
- 2.提前终止版
- 3.跳跃版
- 4.综合评价
- 六、归并排序
-
- 1.分而治之
- 2.二路归并
- 3.复杂度
- 七、位图
-
- 1.数据结构
- 2.典型应用
- 3.快速初始化
一、抽象数据类型
1、接口与实现
1.1 抽象数据类型=数据模型+定义在该模型上的一组模型
-
抽象定义-外部的逻辑特性-操作&语义
-
一种定义-不考虑时间复杂度-不涉及数据的存储方式
1.2 数据结构=基于某种特定语言,实现ADT的一整套算法
-
具体实现-内部的表现与实现-完整的算法
-
多种实现-与复杂度密切相关-要考虑数据的具体存储机制
1.3 在数据结构的具体实现与实际应用之间,ADT就分工与接口制定了统一的规范
-
实现: 高效实现数据结构的ADT接口操作
-
应用: 便捷地通过操作接口使用数据结构
1.4 按照ADT规范
-
高层算法设计者可与底层数据结构实现者高效地分工协作
-
不同的算法与数据结构可以便捷组合借用
-
每种操作接口只需统一地实现一次,代码篇幅缩短,安全性加强,软件复用度提高
2.从数组到向量
2.1 循秩访问
-
向量是数组的抽象与泛化,由一组元素按线性次序封装而成
-
各元素与[0, n)内的秩(rank)一一对应
-
操作、管理维护更加简化、统一与安全
-
元素类型可灵活选取,便于定制复杂数据结构
-
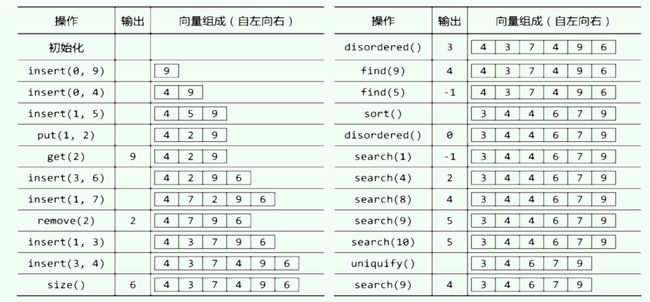
2.2 向量ADT接口
| 操作 | 功能 | 适用对象 |
|---|---|---|
| size() | 报告向量当前的规模(元素总数) | 向量 |
| get® | 获取秩为r的元素 | 向量 |
| put(r, e) | 用e替换秩为r元素的数值 | 向量 |
| insert(r, e) | e作为秩为r元素插入,原后继依次后移 | 向量 |
| remove® | 删除秩为r的元素,返回该元素原值 | 向量 |
| disordered() | 判断所有元素是否已按非降序排列 | 向量 |
| sort() | 调整各元素的位置,使之按非降序排列 | 向量 |
| find(e) | 查找目标元素e | 向量 |
| search(e) | 查找e,返回不大于e且秩最大的元素 | 有序向量 |
| deduplicate(), uniquify() | 剔除重复元素 | 向量/有序向量 |
| traverse() | 遍历向量并统一处理所有元素 | 向量 |
2.3 ADT操作实例
#include<iostream>
#include<vector>
using namespace std;
int main(){
vector v;
vector s( 43, 47 );
s.insert( s.begin() + 2, 2022 );
s.erase( s.end() - 40, s.end() );
for ( i = 0; i < s.size(); i++ ) cout << s[i] << endl;
return 0;
}
3.模板类
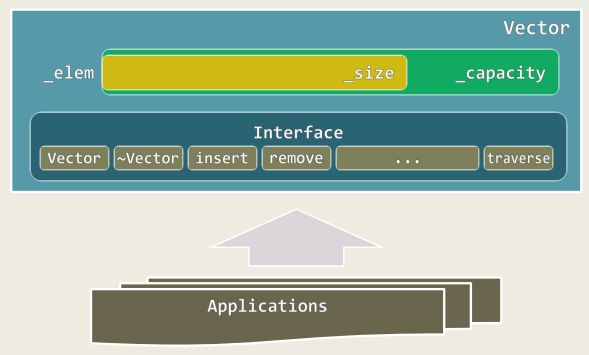
3.1 向量模板类
template<typename T> class Vector {
private:
Rank _size; Rank _capacity; T* _elem; //规模、容量、数据区
protected:
/* ... 内部函数 */构造 + 析构:重载
public:
/* ... 构造函数 */
/* ... 析构函数 */
/* ... 只读接口 */
/* ... 可写接口 */
/* ... 遍历接口 */
/* ... 遍历接口 */
};
3.2 构造 + 析构:重载
#define DEFAULT_CAPACITY 3 //默认初始容量(实际应用中可设置为更大)
Vector( int c = DEFAULT_CAPACITY )
{ _elem = new T[ _capacity = c ]; _size = 0; } //默认构造
Vector( T const * A, Rank lo, Rank hi ) //数组区间复制
{ copyFrom( A, lo, hi ); }
Vector( Vector const & V, Rank lo, Rank hi ) //向量区间复制
{ copyFrom( V._elem, lo, hi ); }
Vector( Vector const & V ) //向量整体复制
{ copyFrom( V._elem, 0, V._size ); }
~Vector() { delete [] _elem; } //释放内部空间
3.3 基于复制的构造
template<typename T> //T为基本类型,或已重载赋值操作符'='
void Vector::copyFrom( T const * A, Rank lo, Rank hi ){
_elem = new T[ _capacity = max( DEFAULT_CAPACITY, 2*(hi − lo) ) ];
for ( _size = 0; lo < hi; _size++, lo++ )
_elem[ _size ] = A[ lo ];
} //O(hi – lo) = O(n)
二、可扩充向量
1.算法
1.1 静态空间管理
- 开辟内部数组_elem[]并使用一段地址连续的物理空间
-
_capacity:总容量
-
_size:当前的实际规模n
-
- 若采用静态空间管理策略,容量_capacity固定,则有明显的不足
-
上溢/overflow:_elem[]不足以存放所有元素,尽管此时系统往往仍有足够的空间
-
下溢/underflow:_elem[]中的元素寥寥无几
-
装填因子:λ = _size/_capacity << 50%
-
1.2 动态空间管理
- 向量:在即将上溢时,适当扩大内部数组的容量
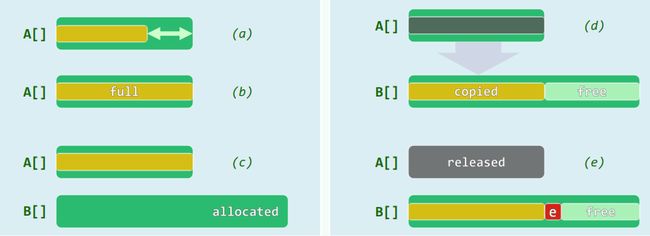
1.3 扩容算法
template void Vector::expand() { //向量空间不足时扩容
if ( _size < _capacity ) return; //尚未满员时,不必扩容
_capacity = max( _capacity, DEFAULT_CAPACITY ); //不低于最小容量
T* oldElem = _elem; _elem = new T[ _capacity <<= 1 ]; //容量加倍
for ( Rank i = 0; i < _size; i++ ) //复制原向量内容
_elem[i] = oldElem[i]; //T为基本类型,或已重载赋值操作符'='
delete [] oldElem; //释放原空间
}
2.分摊
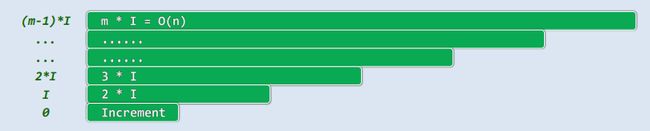
2.1 容量递增策略
-
T* oldElem = _elem; _elem = new T[ _capacity += INCREMENT ];追加固定增量 -
最坏情况:在初始容量0的空向量中,连续插入n=m·I>>2个元素,而无删除操作
-
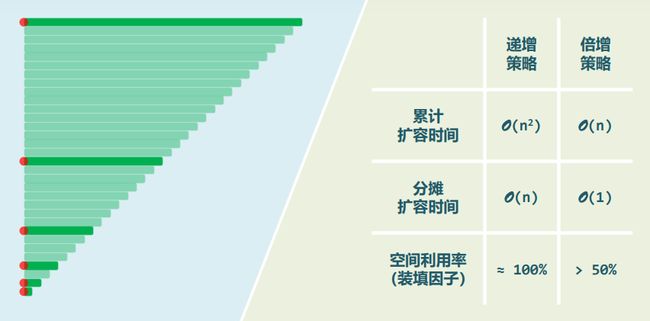
在不计申请空间操作的情况下,各次扩容过程中复制原向量的时间成本依次为0,I,2I,3I,…,(m-1)I(算术级数),总体耗时=O( n 2 n^2 n2),每次操作的分摊成本为O(n)
2.2 容量加倍策略
-
T* oldElem = _elem; _elem = new T[ _capacity <<= 1 ];容量加倍 -
最坏情况:在初始容量1的满向量中,连续插入n= 2 m 2^m 2m>>2个元素,而无删除操作

- 各次扩容过程中复制原向量的时间成本依次为 1 , 2 , 4 , 8 , 16 , . . . , 2 m − 1 , 2 m = n 1,2,4,8,16,...,2^{m-1},2^m=n 1,2,4,8,16,...,2m−1,2m=n(几何级数),总体耗时=O(n),每次操作的分摊成本为O(1)
2.3 对比
2.4 平均分析vs分摊分析
- 平均:根据各种操作出现概率的分布,将对应的成本加权平均
-
各种可能的操作,作为独立事件分别考查
-
割裂了操作之间的相关性和连贯性
-
往往不能准确地评判数据结构和算法的真实性能
-
- 分摊:连续实施的足够多次操作,所需总体成本摊还至单次操作
-
从实际可行的角度,对一系列操作做整体的考量
-
更加忠实地刻画了可能出现的操作序列
-
更为精准地评判数据结构和算法的真实性能
-
三、无序向量
1.元素访问
template<typename T>
//可作为左值:
V[r] = (T) (2*x + 3) T & Vector::operator[]( Rank r ) {
return _elem[ r ];
}
//仅限于右值
const T & Vector::operator[]( Rank r ) const {
return _elem[ r ];
}
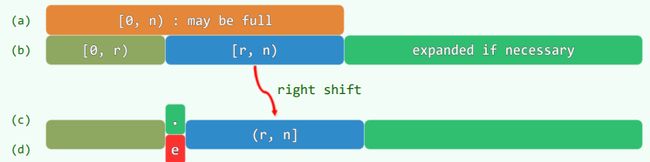
2.插入
template<typename T> Rank Vector::insert( Rank r, T const & e ) {
expand(); //若有必要,扩容
for ( Rank i = _size; r < i; i-- ) //自后向前
_elem[i] = _elem[i - 1];
elem[r] = e; _size++;
return r; //置入新元素,更新容量,返回秩
}
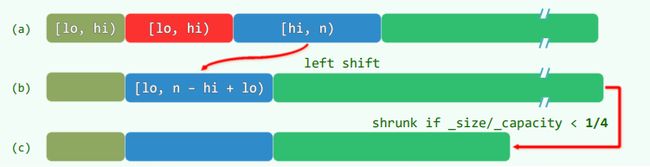
3.区间删除
template int Vector::remove( Rank lo, Rank hi ) { //0<=lo<=hi<=n
if ( lo == hi ) return 0; //出于效率考虑,单独处理退化情况
while ( hi < _size ) _elem[ lo ++ ] = _elem[ hi ++ ];
_size = lo;
shrink(); //更新规模,若有必要则缩容
return hi - lo; //返回被删除元素的数目
}
4.单元素删除
template T Vector::remove( Rank r ) {
T e = _elem[r]; //备份
remove( r, r+1 ); //将单元素视作区间的特例
return e; //返回被删除元素
} //O(n-r)
- 每次循环耗时,正比于删除区间的后缀长度n - hi = O(n),而循环次数等于区间宽度 hi - lo = O(n),如此,将导致总体O(n2)的复杂度
5.查找
- 无序向量:判等器
//词条模板类
template struct Entry {
K key; V value; //关键码、数值
Entry ( K k = K(), V v = V() ) : key ( k ), value ( v ) {}; //默认构造函数
Entry ( Entry const& e ) : key ( e.key ), value ( e.value ) {}; //克隆
bool operator== ( Entry const& e ) { return key == e.key; }
bool operator!= ( Entry const& e ) { return key != e.key; }
}
- 有序向量:比较器
template struct Entry {
K key; V value;
Entry ( K k = K(), V v = V() ) : key ( k ), value ( v ) {};
Entry ( Entry const& e ) : key ( e.key ), value ( e.value ) {};
bool operator== ( Entry const& e ) { return key == e.key; }
bool operator!= ( Entry const& e ) { return key != e.key; }
bool operator< ( Entry const& e ) { return key < e.key; }
bool operator> ( Entry const& e ) { return key > e.key; }
};
-
得益于比较器和判等器,从此往后,不必严格区分词条及其对应的关键码
-
顺序查找
template Rank Vector:: //O(hi - lo) = O(n)
find( T const & e, Rank lo, Rank hi ) const {
while ( (lo < hi--) && (e != _elem[hi]) ); //逆向查找
return hi; //返回值小于lo即意味着失败;否则即命中者的秩(有多个时,返回最大者)
}

6. 去重(唯一化)
template Rank Vector::deduplicate() {
Rank oldSize = _size;
for ( Rank i = 1; i < _size; )
if ( find( _elem[i], 0, i ) < 0 ) i++;
else remove(i);
return oldSize - _size;
}
7.遍历
- 遍历:对向量中的每一元素,统一实施visit()操作
//函数指针,只读或局部性修改
template<typename T>
void Vector::traverse( void ( * visit )( T & ) ) {
for ( Rank i = 0; i < _size; i++ ) visit( _elem[i] );
}
//函数对象,全局性修改更便捷
template<typename T> template<typename VST>
void Vector::traverse( VST & visit ) {
for ( Rank i = 0; i < _size; i++ ) visit( _elem[i] );
}
四、有序向量
1.唯一化
1.1 有序性及其甄别
- 有序/无序序列中,任何/总有一对相邻元素顺序/逆序,相邻逆序对的数目,可在一定程度上度量向量的紊乱程度
template void checkOrder ( Vector & V ) {
int unsorted = 0;
V.traverse( CheckOrder(unsorted, V[0]) ); //统计紧邻逆序对
if ( 0 < unsorted ) printf ( "Unsorted with %d adjacent inversion(s)\n", unsorted );
else printf ( "Sorted\n" );
}
- 无序向量经预处理转换为有序向量之后,相关算法多可优化
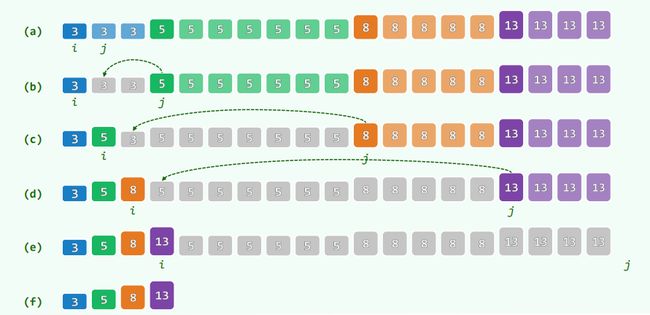
1.2 高效算法
template int Vector::uniquify() {
Rank i = 0, j = 0;
while ( ++j < _size )
if ( _elem[ i ] != _elem[ j ] ) _elem[ ++i ] = _elem[ j ];
_size = ++i;
shrink();
return j - i;
}
2.二分查找A
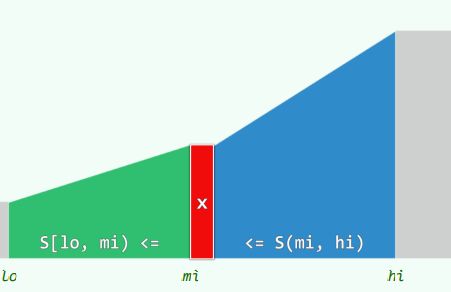
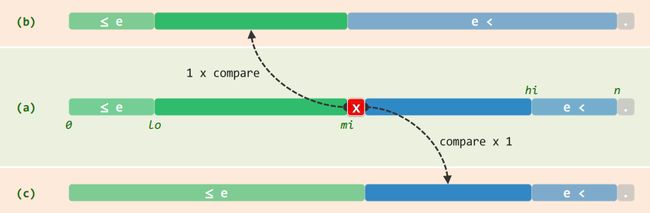
2.1 有序向量中,每个元素都是轴点
- 以任一元素 x = S[mi] 为界,都可将待查找区间[lo,hi)分为三部分,S[lo,mi)≤S[mi]≤S(mi,ho)
2.2 减而治之
-
e < x:则e若存在必属于左侧子区间,故可(减除S[mi,hi)并)递归深入S[lo, mi)
-
x < e:则e若存在必属于右侧子区间,亦可(减除S[lo,mi]并)递归深入S(mi, hi)
-
e = x:已在此处命中,可随即返回
template<typename T>
static Rank binSearch( T * S, T const & e, Rank lo, Rank hi ) {
while ( lo < hi ) { //每步迭代可能要做两次比较判断,有三个分支
Rank mi = ( lo + hi ) >> 1; //轴点居中(区间宽度折半,等效于其数值右移一位)
if ( e < S[mi] ) hi = mi;
else if ( S[mi] < e ) lo = mi + 1;
else return mi;
}
return -1; //失败
}
2.3 复杂度
-
线性“递归”: T ( n ) = T ( n / 2 ) + O ( 1 ) = O ( log n ) T(n)=T(n/2)+O(1)=O(\log n) T(n)=T(n/2)+O(1)=O(logn),大大优于顺序查找
-
“递归”跟踪:轴点总能取到中点,递归深度 O ( log n ) O(\log n) O(logn);各递归实例仅耗s时O(1)
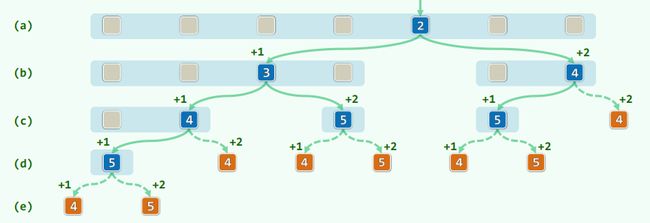
2.4 关键码的比较次数 ~ 查找长度
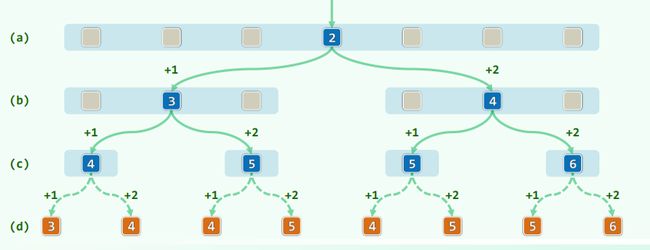
-
成功情况共7种,查找长度分别为 { 4, 3, 5, 2, 5, 4, 6 },等概率情况下,平均 = 29 / 7 = 4.14
-
失败情况共8种,查找长度分别为 {3, 4, 4, 5, 4, 5, 5, 6},等概率情况下,平均 = 36 / 8 = 4.50
3.Fibonacci查找
3.1 构思
- 版本A:转向左、右分支前的关键码比较次数不等,而递归深度却相同,通过递归深度的不均衡对转向成本的不均衡做补偿,平均查找长度应能进一步缩短
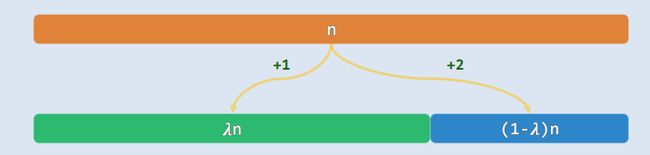
-
在任何区间[0,n)内,总是选取[λ·n]作为轴点,这类查找算法的渐近复杂度为 α ( λ ) ⋅ log 2 n = O ( log n ) α(λ)·\log_{2}n=O(\log n) α(λ)⋅log2n=O(logn)
-
递推式: α ( λ ) ⋅ log 2 n = λ [ 1 + α ( λ ) ⋅ log 2 ( λ n ) ] + ( 1 − λ ) [ 2 + α ( λ ) ⋅ log 2 ( ( 1 − λ ) n ) ] α(λ)·\log_{2}n=λ[1+α(λ)·\log_{2}(λn)]+(1-λ)[2+α(λ)·\log_{2}((1-λ)n)] α(λ)⋅log2n=λ[1+α(λ)⋅log2(λn)]+(1−λ)[2+α(λ)⋅log2((1−λ)n)]
-
整理后: − ln 2 α ( λ ) \frac{-\ln 2}{α(λ)} α(λ)−ln2= λ ⋅ ln λ + ( 1 − λ ) ⋅ ln ( 1 − λ ) 2 − λ \frac{λ·\ln λ + (1-λ)·\ln (1-λ)}{2-λ} 2−λλ⋅lnλ+(1−λ)⋅ln(1−λ)
-
解:当λ=ϕ= ( 5 − 1 ) / 2 (\sqrt{5}-1)/2 (5−1)/2时,α(λ)=1.440420…达到最小
template<typename T>
static Rank fibSearch( T * S, T const & e, Rank lo, Rank hi ) {
for ( Fib fib(hi - lo); lo < hi; ) { //Fib数列制表备查
while ( hi - lo < fib.get() ) fib.prev(); //自后向前顺序查找轴点(分摊O(1))
Rank mi = lo + fib.get() - 1; //确定形如Fib(k) - 1的轴点
if ( e < S[mi] ) hi = mi;
else if ( S[mi] < e ) lo = mi + 1;
else return mi;
}
return -1;
}
3.2 复杂度
-
成功情况共7种:(5 + 4 + 3 + 5 + 2 + 5 + 4) / 7 = 28/7 = 4.00
-
失败情况共8种:(4 + 5 + 4 + 4 + 5 + 4 + 5 + 4) / 8 = 35 / 8 = 4.38
4.二分查找B
4.1 改进思路
-
二分查找中左、右分支转向代价不平衡的问题,也可直接解决,比如每次迭代仅做1次关键码比较;如此,所有分支只有2个方向,而不再是3个
-
同样地,轴点mi取作中点,则查找每深入一层,问题规模依然会缩减一半
-
e < x:则深入左侧的[lo, mi)
-
x <= e:则深入右侧的[mi, hi)
-
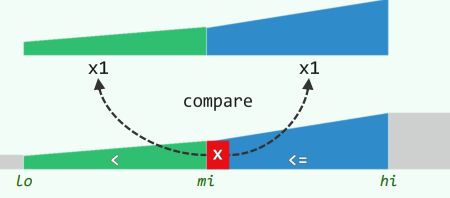
- 但是直到 hi - lo = 1,才明确判断是否命中,相对于版本A,最好(坏)情况下更坏(好),整体性能更趋均衡
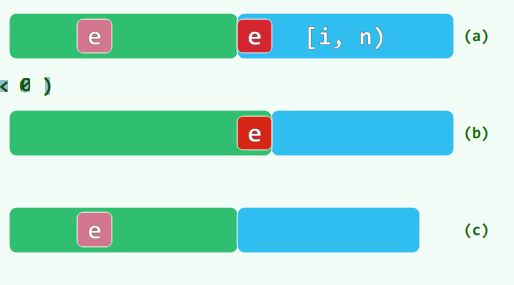
返回值的语义扩充
4.2 返回值的语义扩充
-
约定总是返回 m = search(e) = M-1 (-∞≤m=max{k|[k]≤e},min{k|e<[k]}=M≤+∞)
-
实例:V.insert(1+V.search(e),e)
-
当有多个命中元素时,必须返回最靠后(秩最大)值
-
失败时,应返回小于e的最大值(含哨兵[lo-1])
-
template<typename T>
static Rank binSearch( T * S, T const & e, Rank lo, Rank hi ) {
while ( 1 < hi - lo ) { //有效查找区间的宽度缩短至1时,算法才终止
Rank mi = (lo + hi) >> 1;
e < S[mi] ? hi = mi : lo = mi;
} //出口时hi = lo + 1
return e == S[lo] ? lo : -1 ;
}
5.二分查找C
template<typename T>
static Rank binSearch( T * S, T const & e, Rank lo, Rank hi ) {
while ( lo < hi ) {
Rank mi = (lo + hi) >> 1;
e < S[mi] ? hi = mi : lo = mi + 1; /
} //出口时,区间宽度缩短至0,且必有S[lo = hi] = M
return lo - 1; //故,S[lo-1] = m
}
5.1 与版本B的差异
-
待查找区间宽度缩短至0而非1时,算法才结束
-
转入右侧子向量时,左边界取做mi+1而非mi
-
无论成功与否,返回的秩严格符合接口的语义约定
5.2 正确性
-
不变性:A[0,lo)≤e
-
初始时,lo=0且hi=n,A[0,lo)=A[hi,n)=∅,自然成立
6.插值查找
6.1 原理与算法
-
大数定律:越长的序列,元素的分布越有规律
-
[lo, hi]内各元素应大致呈线性趋势增长
m i − l o h i − l o \frac{mi - lo}{hi - lo} hi−lomi−lo≈ e − A [ l o ] A [ h i ] − A [ l o ] \frac{e-A[lo]}{A[hi]-A[lo]} A[hi]−A[lo]e−A[lo]
m i ≈ l o + ( h i − l o ) ⋅ e − A [ l o ] A [ h i ] − A [ l o ] mi≈lo+(hi-lo)·\frac{e-A[lo]}{A[hi]-A[lo]} mi≈lo+(hi−lo)⋅A[hi]−A[lo]e−A[lo]
6.2 性能
-
最坏:hi-lo=O(n)
-
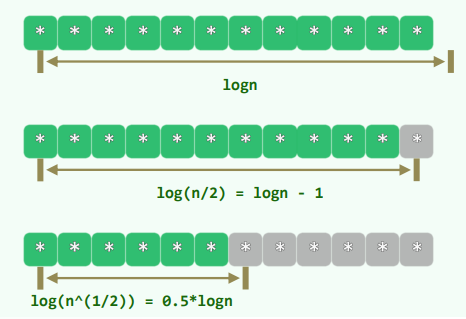
平均:每经一次比较,待查找区间宽度由n缩至 n \sqrt{n} n
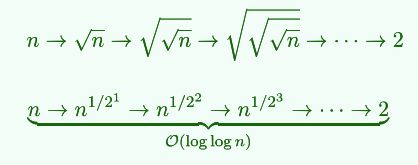
-
每经一次比较,查找区间宽度的数值n开方,有效字长logn减半
- 插值查找 = 在字长意义上的折半查找
- 二分查找 = 在字长意义上的顺序查找
6.3 综合评价
-
从O( log n \log n logn)到O( log log n \log \log n loglogn),优势并不明显(除非查找表极长,或比较操作成本极高)
- 比如,n = 2(25) = 2^32 = 4G时,log2(n) = 32 - log2(log2(n)) =5
-
须引入乘法、除法运算
-
易受畸形分布的干扰和“蒙骗”
-
实际可行的方法
- 首先通过插值查找 迅速将查找范围缩小到一定的尺度
- 然后再进行二分查找 进一步缩小范围
- 最后(当数据项只有200~300时),使用顺序查找
五、起泡排序
1.构思
-
观察:有序/无序序列中,任何/总有一对相邻元素顺序/逆序
-
扫描交换:依次比较每一对相邻元素;如有必要,交换之,直至某趟扫描后,确认相邻元素均已顺序
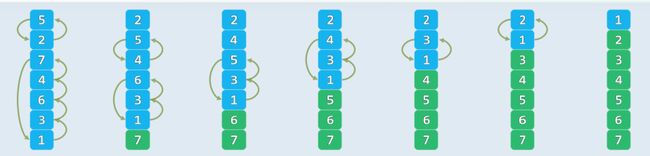
template<typename T>
void Vector::bubbleSort( Rank lo, Rank hi ) {
while( lo < --hi )
for( Rank i = lo; i < hi; i++ )
if( _elem[i] > _elem[i + 1] )
swap( _elem[i], _elem[i + 1] );
}
2.提前终止版
- 有些序列后面部分排序好
template<typename T> void Vector::bubbleSort( Rank lo, Rank hi ) {
for( bool sorted = false; sorted = !sorted; hi-- )
for( Rank i = lo + 1; i < hi; i++ )
if( _elem[i-1] > _elem[i] )
swap( _elem[i-1], _elem[i] ),
sorted = false; //意味着尚未整体有序
}
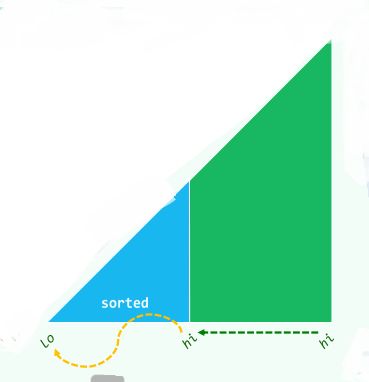
3.跳跃版
- 有些序列已有部分排序好
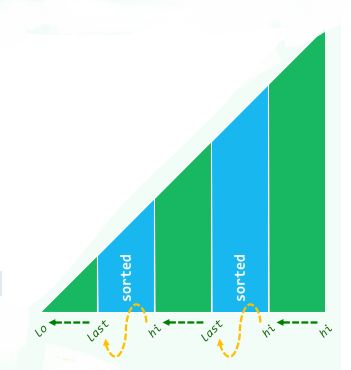
template<typename T>
void Vector::bubbleSort( Rank lo, Rank hi ) {
for( Rank last; lo < hi; hi = last )
for( Rank i = (last = lo) + 1; i < hi; i++ )
if( _elem[i-1] > _elem[i] )
swap( _elem[i-1], _elem[last = i] );
}
4.综合评价
-
时间效率:最好O(n),最坏O(n2)
-
输入含重复元素时,算法的稳定性(stability)是更为细致的要求
-
起泡排序算法是稳定的,在起泡排序中,唯有相邻元素才可交换
- 输入: 6, 7a, 3, 2, 7b, 1, 5, 8, 7c, 4
- 输出: 1, 2, 3, 4, 5, 6, 7a, 7b, 7c, 8
六、归并排序
1.分而治之
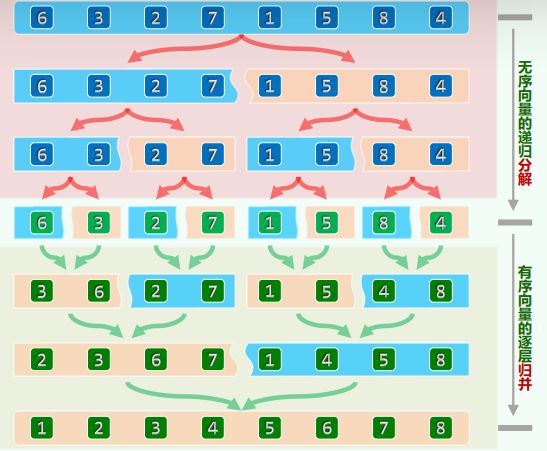
template<typename T>
void Vector::mergeSort( Rank lo, Rank hi ) {
if ( hi - lo < 2 ) return;
int mi = (lo + hi) >> 1; //O(1)
mergeSort( lo, mi ); //对前半段排序 T(n/2)
mergeSort( mi, hi ); //对后半段排序 T(n/2)
merge( lo, mi, hi ); //归并 O(n)
}
2.二路归并
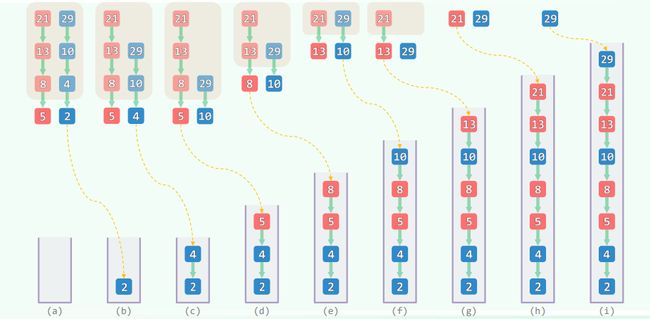
template<typename T>
void Vector::merge( Rank lo, Rank mi, Rank hi ) {
Rank i = 0; T* A = _elem + lo;
Rank j = 0, lb = mi - lo; T* B = new T[lb];
for ( Rank i = 0; i < lb; i++ ) B[i] = A[i]; //复制自A的前缀
Rank k = 0, lc = hi - mi;
T* C = _elem + mi;
while ( ( j < lb ) && ( k < lc ) ) //反复地比较B、C的首元素
A[i++] = ( B[j] <= C[k] ) ? B[j++] : C[k++]; //小者优先归入A中
while ( j < lb ) A[i++] = B[j++]; //若C先耗尽,则将B残余的后缀归入A中
delete [] B;
}
3.复杂度
3.1 运行时间
-
二路归并中,两个while循环每迭代一步,i都会递增;j或k中之一也会随之递增。故累计迭代步数 <= lb + lc = n 二路归并只需O(n)时间
-
归并排序的时间复杂度为O(n log n \log n logn)
3.2 综合评价
-
优点
- 实现最坏情况下最优 性能的第一个排序算法
- 不需随机读写,完全顺序访问——尤其适用于列表之类的序列、磁带之类的设备
- 只要实现恰当,可保证稳定——出现雷同元素时,左侧子向量优先
- 可扩展性极佳,十分适宜于外部排序——海量网页搜索结果的归并
- 易于并行化
-
缺点
- 非就地,需要对等规模的辅助空间
- 即便输入已是完全(或接近)有序,仍需Ω(n log n \log n logn)时间
七、位图
1.数据结构
1.1 有限整数组
- ∀0≤k≤U:
bool test(int k)k∈S?void set(int k)S∪{k}void clear(int k)S{k}
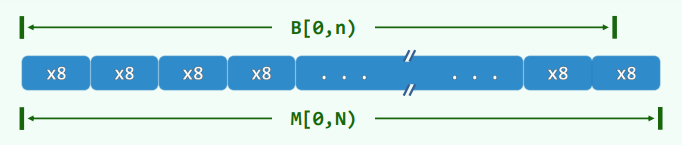
1.2 结构
class Bitmap {
private:
int N;
unsigned char * M;
public:
Bitmap( int n = 8 ) {
M = new unsigned char[ N = (n+7)/8 ];
memset( M, 0, N );
}
~Bitmap() {
delete [] M;
M = NULL;
}
void set( int k );
void clear( int k );
bool test( int k );
};
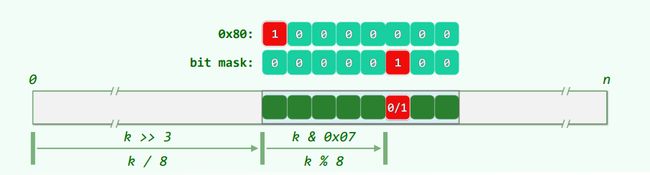
1.3 实现
bool test( int k ) {
return M[ k >> 3 ] & ( 0x80 >> (k & 0x07) );
}
void set( int k ) {
expand( k ); M[ k >> 3 ] |= ( 0x80 >> (k & 0x07) );
}
void clear( int k ) {
expand( k ); M[ k >> 3 ] &= ~( 0x80 >> (k & 0x07) );
}
2.典型应用
-
筛法:思路
-
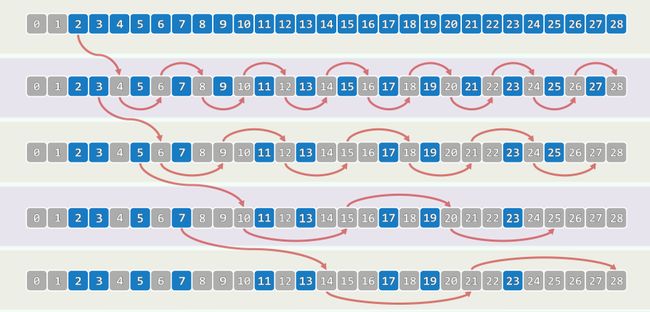
筛法:实现
void Eratosthenes( int n, char * file ) {
Bitmap B( n );
B.set( 0 );
B.set( 1 );
for ( int i = 2; i < n; i++ )
if ( ! B.test( i ) )
for ( int j = 2*i; j < n; j += i )
B.set( j );
B.dump( file );
}
![]()
3.快速初始化
3.1 初始化
-
Bitmap的构造函数中,通过 memset(M,0,N) 统一清零,这一步仍等效于诸位清零,时间O(N) = O(n)
-
有时,对于大规模的散列表,初始化的效率直接影响到实际性能
-
有时,甚至会影响到算法的整体渐近复杂度
-
若能省去Bitmap的初始化,则只需 O(n) 时间
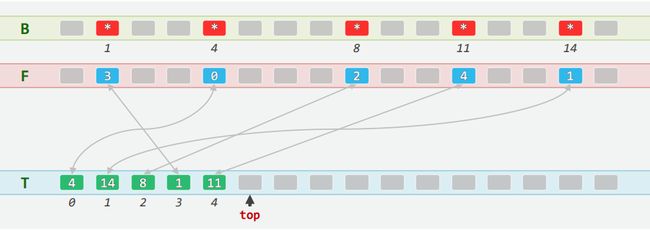
3.2 结构:检验环
- 将B[]拆分成一队等长的Rank型向量,有效位均满足:T[F[k]]=k,F[T[k]]=k
Rank F[m];FormRank T[m]Rank top=0To及其栈顶指示