用通俗易懂的方式讲解大模型分布式训练并行技术:数据并行
近年来,随着Transformer、MOE架构的提出,使得深度学习模型轻松突破上万亿规模参数,传统的单机单卡模式已经无法满足超大模型进行训练的要求。因此,我们需要基于单机多卡、甚至是多机多卡进行分布式大模型的训练。
而利用AI集群,使深度学习算法更好地从大量数据中高效地训练出性能优良的大模型是分布式机器学习的首要目标。为了实现该目标,一般需要根据硬件资源与数据/模型规模的匹配情况,考虑对计算任务、训练数据和模型进行划分,从而进行分布式存储和分布式训练。因此,分布式训练相关技术值得我们进行深入分析其背后的机理。
下面主要对大模型进行分布式训练的并行技术进行讲解,本系列大体分九篇文章进行讲解。
本文为分布式训练并行技术的第二篇:数据并行。由于其原理相对比较简单,因此,在日常会应用中用的比较多。
技术交流
技术要学会分享、交流,不建议闭门造车。一个人可以走的很快、一堆人可以走的更远。
相关资料、数据、技术交流提升,均可加我们的交流群获取,群友已超过2000人,添加时最好的备注方式为:来源+兴趣方向,方便找到志同道合的朋友。
方式①、添加微信号:mlc2060,备注:来自CSDN + 技术交流
方式②、微信搜索公众号:机器学习社区,后台回复:加群
简述
所谓数据并行,就是由于训练数据集太大;因此,将数据集分为N份,每一份分别装载到N个GPU节点中,同时,每个GPU节点持有一个完整的模型副本,分别基于每个GPU中的数据去进行梯度求导。然后,在GPU0上对每个GPU中的梯度进行累加,最后,再将GPU0聚合后的结果广播到其他GPU节点。
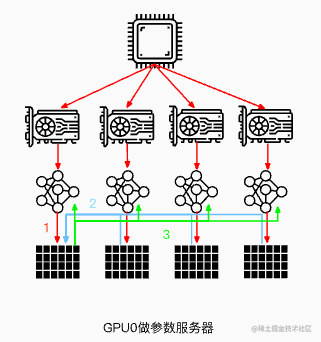
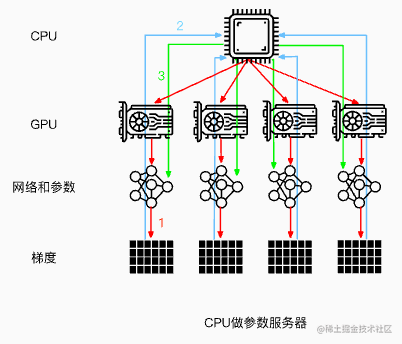
注意:这里是以GPU0作为参数服务器,除此之外,还可以使用CPU作为参数服务器。但是这种场景的训练速度通常会慢于使用GPU0作为参数服务器(通常情况下,GPU与CPU之间通信使用PCIe,而GPU与GPU之间通信使用Nvlink)。
当然,还可以将参数服务器分布在所有GPU节点上面,每个GPU只更新其中一部分梯度。

当然,数据并行不仅仅指对训练的数据并行操作,还可以对网络模型梯度、权重参数、优化器状态等数据进行并行。

下面主要以PyTorch中数据并行的发展为主线讲述现有一些数据并行方法。
数据并行(PyTorch DP)
数据并行(torch.nn.DataParallel),这是Pytorch最早提供的一种数据并行方式,它基于单进程多线程进行实现的,它使用一个进程来计算模型权重,在每个批处理期间将数据分发到每个GPU。
DataParallel 的计算过程如下所示:
-
将 inputs 从主 GPU 分发到所有 GPU 上。
-
将 model 从主 GPU 分发到所有 GPU 上。
-
每个 GPU 分别独立进行前向传播,得到 outputs。
-
将每个 GPU 的 outputs 发回主 GPU。
-
在主 GPU 上,通过 loss function 计算出 loss,对 loss function 求导,求出损失梯度。
-
计算得到的梯度分发到所有 GPU 上。
-
反向传播计算参数梯度。
-
将所有梯度回传到主 GPU,通过梯度更新模型权重。
-
不断重复上面的过程。

它使用非常简单,仅需一行代码即可实现。
net = torch.nn.DataParallel(model, device_ids=[0, 1, 2])
output = net(input_var) # input_var can be on any device, including CPU
但是它的缺点也很明显:
-
单进程多线程带来的问题:DataParallel使用单进程多线程进行实现的,方便了信息的交换,但受困于 GIL,会带来性能开销,速度很慢。而且,只能在单台服务器(单机多卡)上使用(不支持分布式)。同时,不能使用 Apex 进行混合精度训练。
-
效率问题,主卡性能和通信开销容易成为瓶颈,GPU 利用率通常很低:数据集需要先拷贝到主进程,然后再分片(split)到每个设备上;权重参数只在主卡(GPU0)上更新,需要每次迭代前向所有设备做一次同步;每次迭代的网络输出需要聚集到主卡(GPU0)上。因此,通信很快成为一个瓶颈。除此之外,这将导致主卡和其他卡之间,GPU利用率严重不均衡(比如:主卡使用了10G显存,而其他卡只使用了2G显存,batch size稍微设置大一点主卡的显存就OOM了)。
-
不支持模型并行,由于其本身的局限性,没办法与模型并行组合使用。
当然,目前PyTorch官方建议使用DistributedDataParallel,而不是DataParallel类来进行多 GPU 训练,即使在单机多卡的情况下。那么下面我们来看看PyTorch DDP。
分布式数据并行(PyTorch DDP)
分布式数据并行(torch.nn.DistributedDataParallel),基于多进程进行实现的,每个进程都有独立的优化器,执行自己的更新过程。每个进程都执行相同的任务,并且每个进程都与所有其他进程通信。进程(GPU)之间只传递梯度,这样网络通信就不再是瓶颈。

具体流程如下:
-
首先将 rank=0 进程中的模型参数广播到进程组中的其他进程;
-
然后,每个 DDP 进程都会创建一个 local Reducer 来负责梯度同步。
-
在训练过程中,每个进程从磁盘加载 batch 数据,并将它们传递到其 GPU。每个 GPU 都有自己的前向过程,完成前向传播后,梯度在各个 GPUs 间进行 All-Reduce,每个 GPU 都收到其他 GPU 的梯度,从而可以独自进行反向传播和参数更新。
-
同时,每一层的梯度不依赖于前一层,所以梯度的 All-Reduce 和后向过程同时计算,以进一步缓解网络瓶颈。
-
在后向过程的最后,每个节点都得到了平均梯度,这样各个 GPU 中的模型参数保持同步 。

而DataParallel 是将梯度 reduce 到主卡,在主卡上更新参数,再将参数 broadcast 给其他 GPU,这样无论是主卡的负载还是通信开销都比 DDP 大很多),相比于DataParallel,DistributedDataParallel方式可以更好地进行多机多卡运算,更好的进行负载均衡,运行效率也更高,虽然使用起来较为麻烦,但对于追求性能来讲是一个更好的选择。
以下为DistributedDataParallel的简单示例,使用 torch.nn.Linear 作为本地模型,用 DDP 对其进行包装,然后在 DDP 模型上运行一次前向传播、一次反向传播和更新优化器参数步骤。之后,本地模型上的参数将被更新,并且不同进程上的所有模型完全相同。
import torch
import t dist
import torch.multiprocessing as mp
import torch.nn as nn
import torch.optim as optim
from torch.nn.parallel import DistributedDataParallel as DDP
def example(rank, world_size):
# create default process group
dist.init_process_group("gloo", rank=rank, world_size=world_size)
# create local model
model = nn.Linear(10, 10).to(rank)
# construct DDP model
ddp_model = DDP(model, device_ids=[rank])
# define loss function and optimizer
loss_fn = nn.MSELoss()
optimizer = optim.SGD(ddp_model.parameters(), lr=0.001)
# forward pass
outputs = ddp_model(torch.randn(20, 10).to(rank))
labels = torch.randn(20, 10).to(rank)
# backward pass
loss_fn(outputs, labels).backward()
# update parameters
optimizer.step()
def main():
world_size = 2
mp.spawn(example,
args=(world_size,),
nprocs=world_size,
join=True)
if __name__=="__main__":
# Environment variables which need to be
# set when using c10d's default "env"
# initialization mode.
os.environ["MASTER_ADDR"] = "localhost"
os.environ["MASTER_PORT"] = "29500"
main()
DP 与 DDP 的区别
DP 和 DDP 的主要差异有以下几点:
-
DP 是基于单进程多线程的实现,只用于单机情况,而 DDP 是多进程实现的,每个 GPU 对应一个进程,适用于单机和多机情况,真正实现分布式训练,并且因为每个进程都是独立的 Python 解释器,DDP 避免了 GIL 带来的性能开销。
-
参数更新的方式不同。DDP在各进程梯度计算完成之后,各进程需要将梯度进行汇总平均,然后再由 rank=0 的进程,将其广播到所有进程后,各进程用该梯度来独立的更新参数(而 DP是梯度汇总到 GPU0,反向传播更新参数,再广播参数给其他剩余的 GPU)。由于DDP各进程中的模型,初始参数一致 (初始时刻进行一次广播),而每次用于更新参数的梯度也一致;因此,各进程的模型参数始终保持一致(而在DP中,全程维护一个 optimizer,对各个GPU上梯度进行求平均,而在主卡进行参数更新,之后再将模型参数广播到其他GPU)。相较于DP,DDP传输的数据量更少,训练更高效,不存在 DP 中负载不均衡的问题。目前,基本上 DP 已经被弃用。
-
DDP 支持模型并行,而 DP 并不支持,这意味如果模型太大单卡显存不足时,只能使用DDP。
补充说明:DP与DDP数据传输过程
DP数据传输过程:
-
前向传播得到的输出结果gather到主cuda计算loss
-
scatter上述loss到各个cuda
-
各个cuda反向传播计算得到梯度后gather到主cuda后,主cuda的模型参数被更新。
-
主cuda将模型参数broadcast到其它cuda设备上,至此,完成权重参数值的同步。
综上,DP大概是有4次输出传输。
DDP数据传输过程:
- 前向传播的输出和loss的计算都是在每个cuda独立计算的,梯度all-reduce到所有的CUDA(传输梯度),这样初始参数相同,para.grad也相同,反向传播后参数就还是保持一致的,其他没有数据传输了。
完全分片数据并行(PyTorch FSDP)
由于 PyTorch FSDP 受 DeepSpeed ZeRO 启发而获得灵感,因此,下面先简要介绍下 ZeRO。
补充说明:ZeRO
通常来说,在模型训练的过程中,GPU上需要进行存储的参数包括了模型本身的参数、优化器状态、激活函数的输出值、梯度以及一些零时的Buffer。各种数据的占比如下图所示:

可以看到模型参数仅占模型训练过程中所有数据的一部分,当进行混合精度运算时,其中模型状态参数(优化器状态 + 梯度+ 模型参数)占到了一大半以上。因此,我们需要想办法去除模型训练过程中的冗余数据。
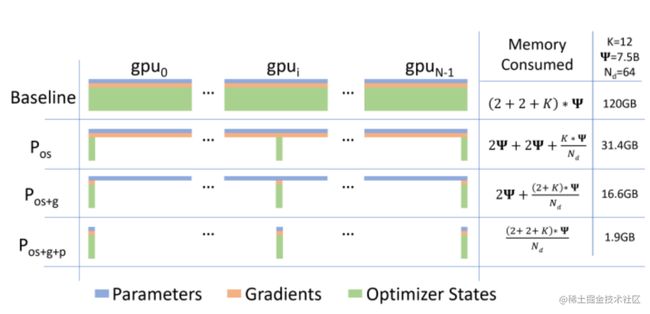
针对模型状态的存储优化(去除冗余),DeepSpeed 提出了 ZeRO,ZeRO 使用的方法是分片,即每张卡只存 1/N 的模型状态量,这样系统内只维护一份模型状态参数。
ZeRO对 模型状态(Model States)参数进行不同程度的分割,主要有三个不同级别:
-
ZeRO-1 : 优化器状态分片( Optimizer States Sharding)
-
ZeRO-2 : 优化器状态与梯度分片(Optimizer States & Gradients Sharding)
-
ZeRO-3 : 优化器状态、梯度和模型权重参数分片(Optimizer States & Gradients & Parameters Sharding)
ZeRO-1:
ZeRO-1没有将模型本身进行分片,也没有将Gradient进行分片,而是只将优化器进行分片。训练过程与DDP类似。
-
forward过程由每个rank的GPU独自完整的完成,然后进行backward过程。在backward过程中,梯度通过allReduce进行同步。
-
Optimizer state 使用贪心策略基于参数量进行分片,以此确保每个rank几乎拥有相同大小的优化器内存。
-
每个rank只负责更新当前优化器分片的部分,由于每个rank只有分片的优化器state,所以当前rank忽略其余的state。
-
在更新过后,通过广播或者allGather的方式确保所有的rank都收到最新更新过后的模型参数。
ZeRO-1 非常适合使用类似Adam进行优化的模型训练,因为Adam拥有额外的参数m(momentum)与v(variance),特别是FP16混合精度训练。ZeRO-1 不适合使用SGD类似的优化器进行模型训练,因为SGD只有较少的参数内存,并且由于需要更新模型参数,导致额外的通讯成本。ZeRO-1只是解决了Optimizer state的冗余。
ZeRO-2:
相比于ZeRO-1,ZeRO-2除了对optimizer state进行切分,还对Gradient进行了切分。
像ZeRO-1一样将optimizer的参数进行分片,并安排在不同的rank上。在backward过程中,gradients被reduce操作到对应的rank上,取代了all-reduce,以此减少了通讯开销。每个rank独自更新各自负责的参数。在更新操作之后,广播或allGather保证所有的ranks接收到更新后的参数。
ZeRO-3:
为了进一步节省更多的内存,ZeRO-3提出进行模型参数的分片。类似以上两种分片方式,ranks负责模型参数的切片。可以进行参数切片的原因主要有以下两点:
-
All-Reduce操作可以被拆分为Reduce与allgather操作的结合。
-
模型的每一层拥有该层的完整参数,并且整个层能够直接被一个GPU装下。所以计算前向的时候,除了当前rank需要的层之外,其余的层的参数可以抛弃。从这个层面上来说,Zero相当于数据并行+模型并行。
FSDP
完全分片数据并行(torch.distributed.fsdp.FullyShardedDataParallel),是Pytorch最新的数据并行方案,在1.11版本引入的新特性,目的主要是用于训练大模型。我们都知道Pytorch DDP用起来简单方便,但是要求整个模型加载到一个GPU上,这使得大模型的训练需要使用额外复杂的设置进行模型分片。因此,为了打破模型分片的障碍(包括模型参数,梯度,优化器状态);同时,仍然保持了数据并行的简单性,该新特性应运而生。
FSDP 是一种新型数据并行训练方法,但与传统的数据并行不同,传统的数据并行维护模型参数、梯度和优化器状态的每个 GPU 副本,而 FSDP 将所有这些状态跨数据并行工作线程进行分片,并且可以选择将模型参数分片卸载到 CPU。
下图显示了 FSDP 如何在 2 个数据并行进程中工作流程:
通常,模型层以嵌套方式用 FSDP 包装,因此,只有单个 FSDP 实例中的层需要在前向或后向计算期间将完整参数收集到单个设备。计算完成后,收集到的完整参数将立即释放,释放的内存可用于下一层的计算。通过这种方式,可以节省峰值 GPU 内存,从而可以扩展训练以使用更大的模型大小或更大的批量大小。为了进一步最大化内存效率,当实例在计算中不活动时,FSDP 可以将参数、梯度和优化器状态卸载到 CPU。
解锁ZeRO/FSDP的关键是我们可以把DDP之中的All-Reduce操作分解为独立的 Reduce-Scatter 和 All-Gather 操作。

image.png
All-Reduce 是 Reduce-Scatter 和 All-Gather 的组合。聚合梯度的标准 All-Reduce 操作可以分解为两个单独的阶段。
-
Reduce-Scatter 阶段,在每个GPU上,会基于 rank 索引对 rank 之间相等的块进行求和。
-
All-Gather 阶段,每个GPU上的聚合梯度分片可供所有GPU使用。
通过重新整理 Reduce-Scatter 和 All-Gather,每个 DDP worker只需要存储一个参数分片和优化器状态。
在 PyTorch 中使用 FSDP 包装模型有两种方法。
-
自动包装(Auto Wrapping)是 DDP 的直接替代品;
-
手动包装(Manual Wrapping)需要对模型定义代码进行少量的更改,并且能够探索复杂的分片策略。
自动包装(Auto Wrapping)
模型层应以嵌套方式包装在 FSDP 中,以节省峰值内存并实现通信和计算重叠。最简单的方法是自动包装,它可以作为 DDP 的直接替代品,而无需更改其余代码。
fsdp_auto_wrap_policy参数允许指定可调用函数以使用 FSDP 递归地包裹层。PyTorch FSDP提供的default_auto_wrap_policy函数递归地包裹参数数量大于100M的层。当然,您也可以根据需要提供自己的包装策略。
此外,可以选择配置 cpu_offload,以便在计算中不使用包装参数时将这些参数卸载到 CPU。这可以进一步提高内存效率,但代价是主机和设备之间的数据传输开销。
下面的示例展示了如何使用自动包装(Auto Wrapping)来包装 FSDP。
from torch.distributed.fsdp import (
FullyShardedDataParallel,
CPUOffload,
)
from torch.distributed.fsdp.wrap import (
default_auto_wrap_policy,
)
import torch.nn as nn
class model(nn.Module):
def __init__(self):
super().__init__()
self.layer1 = nn.Linear(8, 4)
self.layer2 = nn.Linear(4, 16)
self.layer3 = nn.Linear(16, 4)
model = DistributedDataParallel(model())
fsdp_model = FullyShardedDataParallel(
model(),
fsdp_auto_wrap_policy=default_auto_wrap_policy,
cpu_offload=CPUOffload(offload_params=True),
)
手动包装(Manual Wrapping)
通过有选择地对模型的某些部分应用包装,手动包装对于探索复杂的分片策略非常有用。总体设置可以传递给enable_wrap()上下文管理器。
from torch.distributed.fsdp import (
FullyShardedDataParallel,
CPUOffload,
)
from torch.distributed.fsdp.wrap import (
enable_wrap,
wrap,
)
import torch.nn as nn
from typing import Dict
class model(nn.Module):
def __init__(self):
super().__init__()
self.layer1 = wrap(nn.Linear(8, 4))
self.layer2 = nn.Linear(4, 16)
self.layer3 = wrap(nn.Linear(16, 4))
wrapper_kwargs = Dict(cpu_offload=CPUOffload(offload_params=True))
with enable_wrap(wrapper_cls=FullyShardedDataParallel, **wrapper_kwargs):
fsdp_model = wrap(model())
使用上述两种方法之一,用 FSDP 包装模型后,可以采用与本地训练类似的方式训练模型,具体如下所示:
optim = torch.optim.Adam(fsdp_model.parameters(), lr=0.0001)
for sample, label in next_batch():
out = fsdp_model(input)
loss = criterion(out, label)
loss.backward()
optim.step()
DDP 与 FSDP 的区别

在标准的数据并行(DistributedDataParallel)训练方法中,每个GPU上都有一个模型副本,向前和向后传递的序列只在自己的数据分片上进行运行。在这些局部计算之后,每个局部过程的参数和优化器与其他GPU共享,以便计算全局权重更新。
而在FullyShardedDataParallel训练方法中:
-
Model shard:每个GPU上仅存在模型的分片。
-
All-gather:每个GPU通过all-gather从其他GPU收集所有权重,以在本地计算前向传播。
-
Forward(local):在本地进行前向操作。前向计算和后向计算都是利用完整模型。
-
All-gather:然后在后向传播之前再次执行此权重收集。
-
Backward(local):本地进行后向操作。前向计算和后向计算都是利用完整模型,此时每个GPU上也都是全部梯度。
-
Reduce-Scatter:在向后传播之后,局部梯度被聚合并且通过 Reduce-Scatter 在各个GPU上分片,每个分片上的梯度是聚合之后本分片对应的那部分。
-
Update Weight(local):每个GPU更新其局部权重分片。
同时,为了最大限度地提高内存效率,我们可以在每层前向传播后丢弃全部权重,为后续层节省内存。这可以通过将 FSDP 包装应用于网络中的每一层来实现(通过设置reshard_after_forward=True)。
总结
本文主要讲解了大模型分布式训练并行技术的数据并行,并以Pytorch为主线讲解了DP、DDP、FSDP三种不同的数据并行方案。
DP 主要存在如下问题:
-
单进程多线程模式,由于锁的机制导致线程间同步存在瓶颈。
-
使用普通的All-Reduce机制,所有的卡需要将梯度同步给0号节点,并由0号节点平均梯度后反向传播,再分发给所有其他节点,意味着0号节点负载很重。
-
由于第二点的原因,导致0号GPU通讯成本是随着GPU数量的上升而线性上升的。
-
不支持多机多卡。
目前,由于性能问题,DP基本不用了。
而 DDP 是多进程实现的,每个 GPU 对应一个进程,适用于单机和多机情况,真正实现分布式训练,并且因为每个进程都是独立的 Python 解释器,DDP 避免了 GIL 带来的性能开销。
DDP在各进程梯度计算完成之后,各进程需要将梯度进行汇总平均,然后再由 rank=0 的进程,将其广播到所有进程后,各进程用该梯度来独立的更新参数。由于DDP各进程中的模型,初始参数一致 (初始时刻进行一次广播),而每次用于更新参数的梯度也一致;因此,各进程的模型参数始终保持一致。相较于DP,DDP传输的数据量更少,训练更高效,不存在 DP 中负载不均衡的问题。
虽然Pytorch DDP实现了真正的分布式训练,同时,避免了DP 中负载不均衡的问题,但是,要求整个模型加载到一个GPU上,这使得大模型的训练需要使用额外复杂的设置进行模型分片。因此,为了打破模型分片的障碍(包括模型参数,梯度,优化器状态),同时仍然保持了数据并行的简单性,FSDP应运而生。
FSDP 是一种新型数据并行训练方法,但与传统的数据并行不同,传统的数据并行维护模型参数、梯度和优化器状态的每个 GPU 副本,而 FSDP 将所有这些状态跨数据并行工作线程进行分片,并且可以选择将模型参数分片卸载到 CPU。
如果觉得我的文章能够能够给您带来帮助,期待您的点赞收藏加关注~~