STM32F4X ADC
STM32F4X ADC
- 什么是ADC
- STM32F4 ADC
-
- ADC工作框图
- ADC分辨率
- ADC数据对齐
- 单次转换、连续转换与扫描模式的关系
- ADC采样时间
-
- ADC采样时间计算
- 内部温度传感器
- STM32F4X ADC例程
-
- ADC配置步骤
- ADC单通道转换 软件触发和定时器触发
什么是ADC
ADC全称是Analog-Digital-Converter,模拟数字转换,也叫模数转换。为什么嵌入式系统需要ADC,我们知道在自然界中广泛存在模拟量,比如声、光、电、磁等。但是对于嵌入式系统来说,如果想要识别自然界的模拟量,就必须将模拟量转换成MCU熟悉的数字量,而在模拟量和数字量之间进行转换的模块就叫模数转换器。
STM32F4 ADC
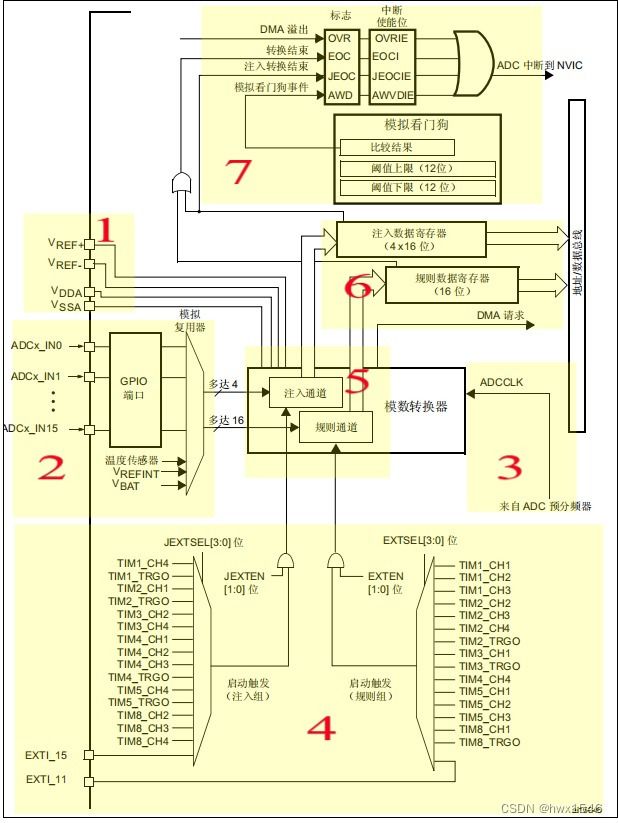
ADC工作框图
STM32F4X的ADC功非常多,下面来简单讲一下STM32F4X的ADC框图,对ADC的有一个大致的了解
-
ADC参考电压。参考电压也叫基准电压,如果没有参考电压,ADC将不能工作。比如ADC的参考电压为3.3V,如果ADC检测到的模拟量为3.3V,那么此时ADC采出来的量程就为满量程。

-
ADC输入通道。STM32F4X一共有16个输入通道,分别为通道0~通道15,每个通道都有对应的GPIO引脚。此外还有3个内部通道,分别是温度传感器、VBAT和VREFINT。

-
ADC时钟。ADC的时钟源来自内部的APB时钟,可以通过ADC_CCR寄存器的ADCPRE位进行分频,可以配置2/4/6/8分频,不同的时钟频率会影响ADC的采样时间。
-
ADC触发源。触发源的意思就是可以通过一些外部的事件触发ADC进行转换。通常有软件触发和外部触发。软件触发需要将ADC_CR2寄存器的SWSTART位置1,软件触发只能转换规则通道。外部事件触发可以选择定时器触发和外部中断触发,外部事件触发可以转换规则通道和注入通道。如果配置了外部事件触发,还需要额外配置触发极性,触发极性有无极性、上升沿触发、下降沿触发和边沿触发。
-
转换通道。STM32F4X的ADC有两种转换通道,分别是规则转换通道和注入转换通道。规则转换通道可以理解成就是普通的转换通道,在没有配置注入转换通道的情况下,规则转换通道是按照逐个通道进行转换。注入转换通道可以理解为中断,就是在有注入转换通道的情况下,注入转换通道可以打断规则转换通道,优先进行转换。STM32F4X有4个注入转换通道和16个规则转换通道,用户可以自行进行选择。
-
ADC数据寄存器。ADC转换完成后的数据会保存到数据寄存器里面。其中注入通道的数据寄存器有4个,规则通道的数据寄存器只有1个。用户需要读取ADC状态寄存器中的转换完成标志位来判断本次转换是否完成,转换完成后需要及时把数据寄存器中的数据读走。
-
ADC中断。当ADC转换完成后,ADC会产生4种中断,分别是规则通道转换结束中断、注入转换通道转换结束中断、模拟看门狗和溢出中断。
ADC分辨率
分辨率(Resolution)是指ADC能够分辨量化的最小信号的能力,用二进制位数表示。比如:一个10位的ADC,其所能分辨的最小量化电平为参考电平(满量程)的2的10次方分之一。即分辨率越高,就可以将满量程里的电平分出更多份数,得到的结果就越精确。STM32F4X的分辨率有6/8/10/12位。下面以3.3V的参考电压为例,分别计算不同分辨率下的刻度。
| 分辨率 | 6位 | 8位 | 10位 | 12位 |
|---|---|---|---|---|
| 刻度(V) | 0.0515625 | 0.012890625 | 0.00322265625 | 0.0008056640625 |
可以看到分辨率越高,转换后的数据就越准确。
ADC数据对齐
ADC的数据对齐方式有两种,分别是左对齐和右对齐。因为STM32F4X的ADC数据寄存器是16位,所以不同的对齐方式得到的数据也会不同,以12位分辨率,转换数据为3.3V为例。
| 对齐方式 | 左对齐 | 右对齐 |
|---|---|---|
| 转换值 | 0xFFF0 | 0x0FFF |
左对齐的数据以二进制形式的存储如下

右对齐的数据以二进制形式的存储如下

如果是左对齐方式,在得到转换的数据后还需要手动进行移位才可以得到正确的数据,而右对齐则不需要移位,数据可以直接读取。
单次转换、连续转换与扫描模式的关系
假设有CH0、CH1和CH2三个通道需要转换
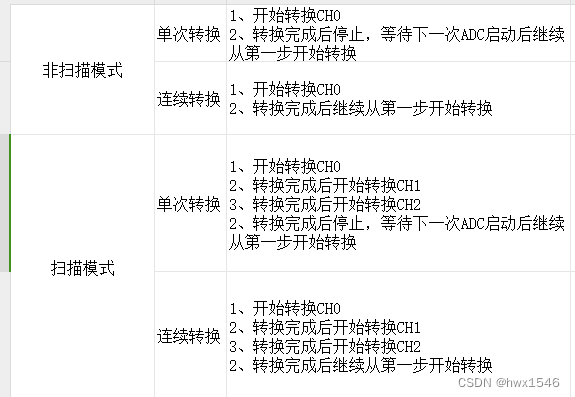
非扫描模式一般用于单个ADC通道的转换,而扫描模式一般用于2个以上的ADC通道的转换,扫描模式一般跟DMA进行搭配使用。
ADC采样时间
ADC采样时间也可以叫ADC的转换时间,通常来说采样时间越长,精确度越高。在STM32F4X中可以通过对SMPX寄存器设置采样周期。
ADC采样时间计算
STM32F4X的ADC转换时间如下
Tconv = 采样时间 + 12 个周期
假设ADC时钟为30MHZ,采样周期设置为3个周期,计算如下
ADC的时钟周期:1 / 30000000(Hz) = 0.03us
转换周期:3 + 12 = 15个周期 0.03us * 15 = 0.5us
也就是说在ADC时钟为30MHz,采样周期为3个周期的条件下,转换一次ADC通道的时间为0.5us。如果用的是定时器触发,还需要加上定时器的溢出时间。
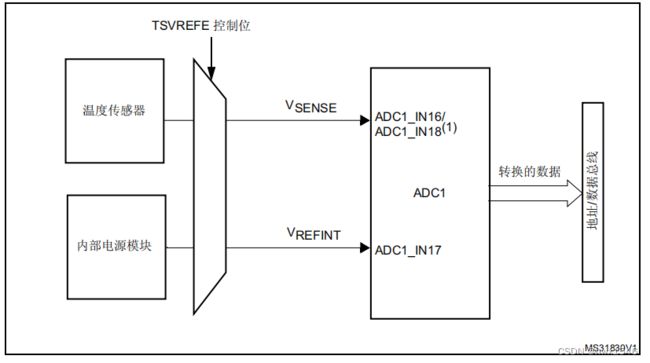
内部温度传感器
STM32F4X的自带了一个温度传感器,对于STM32F40X和STM32F41X的温度传感器接到了ADC1_IN16通道上。对于 STM32F42x 和 STM32F43x 器件,温度传感器内部连接到与 VBAT 共用的输入通 道 ADC1_IN18,ADC1_IN18 用于将传感器输出电压或 VBAT 转换为数字值。一次只能选择一个转换(温度传感器或 VBAT)。同时设置了温度传感器和 VBAT 转换时,将 只进行 VBAT 转换。
STM32F4X的温度传感器支持的温度范围为-40 °C 到 125 °C。精度:±1.5 °C
STM32F4X ADC例程
ADC配置步骤
- 根据数据手册选择要使用的ADC通道
- 使能ADC和GPIO时钟
- 将GPIO配置成模拟输入模式
- 配置ADC的时钟分频,ADC模式
- 配置ADC的扫描模式、转换模式、分辨率位数、数据对齐和触发源
- 配置规则通道或者注入通道
- 启动ADC转换
ADC单通道转换 软件触发和定时器触发
#include "adc.h"
#ifndef ADC_INT
void bsp_adc_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
ADC_CommonInitTypeDef ADC_CommonInitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
ADC_InitTypeDef ADC_InitStruct;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); // 使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE); // 使能ADC1时钟
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AN; // GPIO设置为模拟输入模式
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOA,&GPIO_InitStruct);
ADC_DeInit(); // 复位ADC
ADC_CommonInitStruct.ADC_DMAAccessMode = ADC_DMAAccessMode_Disabled; // 不使用DMA
ADC_CommonInitStruct.ADC_Mode = ADC_Mode_Independent; // 独立模式
ADC_CommonInitStruct.ADC_Prescaler = ADC_Prescaler_Div4; // ADC分频值为4
ADC_CommonInitStruct.ADC_TwoSamplingDelay = ADC_TwoSamplingDelay_5Cycles; // 两个ADC之间间隔5个周期
ADC_CommonInit(&ADC_CommonInitStruct);
ADC_InitStruct.ADC_ContinuousConvMode = ENABLE; // 使能连续转换
ADC_InitStruct.ADC_DataAlign = ADC_DataAlign_Right; // 数据右对齐
ADC_InitStruct.ADC_ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_None; // 不使用触发模式
ADC_InitStruct.ADC_NbrOfConversion = 1; // 转换通道1个
ADC_InitStruct.ADC_Resolution = ADC_Resolution_12b; // 分辨率12位
ADC_InitStruct.ADC_ScanConvMode = DISABLE; // 不使用扫描模式
ADC_Init(ADC1,&ADC_InitStruct);
ADC_RegularChannelConfig(ADC1,ADC_Channel_5,1,ADC_SampleTime_480Cycles); // 配置转换规则通道,采样周期为480
ADC_Cmd(ADC1, ENABLE);//开启AD转换器
ADC_SoftwareStartConv(ADC1); // 开始软件转换
}
u16 get_adc_value(void)
{
uint32_t count = 0,adc_value = 0;
for(count = 0; count < 5;count++)
{
while(ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC) != SET); // 判断转换是否完成
adc_value += ADC_GetConversionValue(ADC1); // 读取转换值
}
return adc_value / 5;
}
#endif
#ifdef ADC_INT
void bsp_adc_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
ADC_CommonInitTypeDef ADC_CommonInitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
RCC_ClocksTypeDef RCC_Clocks;
ADC_InitTypeDef ADC_InitStruct;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
/* 定时器初始化 */
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数模式
TIM_TimeBaseInitStruct.TIM_Period = 9999; // 重装值为5000 500ms中断一次
TIM_TimeBaseInitStruct.TIM_Prescaler = 4199; // 预分配值为4200 即42000000/4200 = 10KHZ 0.1ms计一次书
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStruct); // 初始化定时器3
TIM_SelectOutputTrigger(TIM3,TIM_TRGOSource_Update);
TIM_Cmd(TIM3,ENABLE); // 使能定时器3
/* GPIO 初始化 */
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AN; // 配置模拟输入
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOA,&GPIO_InitStruct);
/* ADC初始化 */
ADC_DeInit();
ADC_CommonInitStruct.ADC_DMAAccessMode = ADC_DMAAccessMode_Disabled; // 不使用DMA
ADC_CommonInitStruct.ADC_Mode = ADC_Mode_Independent; // 独立模式
ADC_CommonInitStruct.ADC_Prescaler = ADC_Prescaler_Div4; // ADC分频为4
ADC_CommonInitStruct.ADC_TwoSamplingDelay = ADC_TwoSamplingDelay_20Cycles; // // 两个ADC之间间隔20个周期
ADC_CommonInit(&ADC_CommonInitStruct);
ADC_InitStruct.ADC_ContinuousConvMode = DISABLE; // 关闭连续转换
ADC_InitStruct.ADC_DataAlign = ADC_DataAlign_Right; // 数据右对齐
ADC_InitStruct.ADC_ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_Falling; // 夏建业触发
ADC_InitStruct.ADC_ExternalTrigConv = ADC_ExternalTrigConv_T3_TRGO; // 定时器3 TRGO事件触发
ADC_InitStruct.ADC_NbrOfConversion = 1; // 转换通道1个
ADC_InitStruct.ADC_Resolution = ADC_Resolution_12b; // 分辨率12位
ADC_InitStruct.ADC_ScanConvMode = DISABLE; // 关闭扫描模式
ADC_Init(ADC1,&ADC_InitStruct);
NVIC_InitStruct.NVIC_IRQChannel = ADC_IRQn; // ADC 中断编号
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 2; // 抢占优先级为1
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 2; // 响应优先级为1
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; // 使能中断
NVIC_Init(&NVIC_InitStruct); // 初始化中断
ADC_ITConfig(ADC1,ADC_IT_EOC,ENABLE); // 使能ADC EOC中断
ADC_RegularChannelConfig(ADC1,ADC_Channel_5,1,ADC_SampleTime_480Cycles); // 配置规则通道
//ADC_SoftwareStartConv(ADC1);
ADC_Cmd(ADC1, ENABLE);//开启AD转换器
}
void ADC_IRQHandler(void)
{
static u32 n=0;
if(ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC)!=RESET) // 判断是否转换完成
{
printf("%f\r\n", ADC_GetConversionValue(ADC1) * 3.3 / 4096);
ADC_ClearITPendingBit(ADC1,ADC_FLAG_EOC); // 清中断
}
}
#endif
int main(void)
{
int i;
NVIC_PriorityGroupConfig(2);
system_tick_init();
bsp_usart_init(115200);
bsp_adc_init();
while(1){
delay_ms(1000);
#ifndef ADC_INT
printf("%f\r\n",get_adc_value() * 3.3 / 4096);
#endif
}
}