AGV小车、机械臂协同作业实战04-opentcs Model Editor模型元素及属性说明
openTCS基础元素
接下来我们先了解以下几个元素的作用
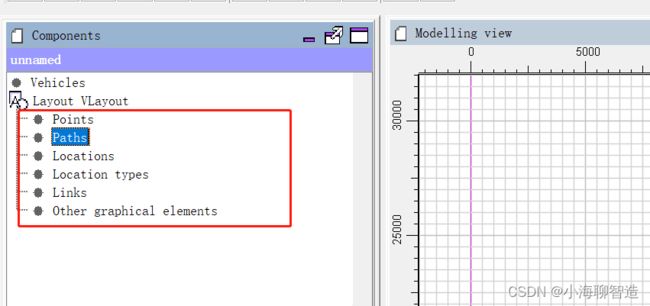

Points
节点(Point ) 即拓扑图中的节点,在仿真平台的地图中小车由一个节点转入另一个节点以实现运动。
Point的属性:
1)type (类型)节点有三种不同的类型/分类**
-
Halt position (停留节点)即小车在接到任务的时刻所在的节点(也就是说小车可以在该节点停留);在初始化仿真程序时小车的默认节点(default type)一定是Halt position 。
-
Reporting position (报告节点)小车不会被命令运行到当前的报告节点,也不会停留在当前的报告节点;(在软件自带的Demo-01中没有用到该节点,推测应用范围较小)。
-
Parking position (停车节点)小车可以长时间泊车的节点。
如下图所示:

在仿真平台(plant overview)中,可以在界面上设置三种节点(图1左上角),不同节点的作用不同。
2)position(坐标位置)即节点在地图中的坐标
一个点有两种坐标(如图1左下角所示,很好理解)
layout coordinates【仿真界面中的图形坐标】;model coordinates【真实坐标】
在仿真界面中拖动节点 x/y-position(model) 会变化,而Point x/y position不会变化。
同步两种坐标的方法:(界面中点击)
• Select Actions | Copy model values to layout or Actions | Copy layout values to model to synchronize them globally
或
• Select a single layout element, right click it and select Context menu | Copy model values to layout or Context menu | Copy layout values to model to synchronize them only for the selected element
(3)vehicle orientation angle(车辆朝向角)当车辆到达(occupy占据)该点时的朝向角(容易理解)。

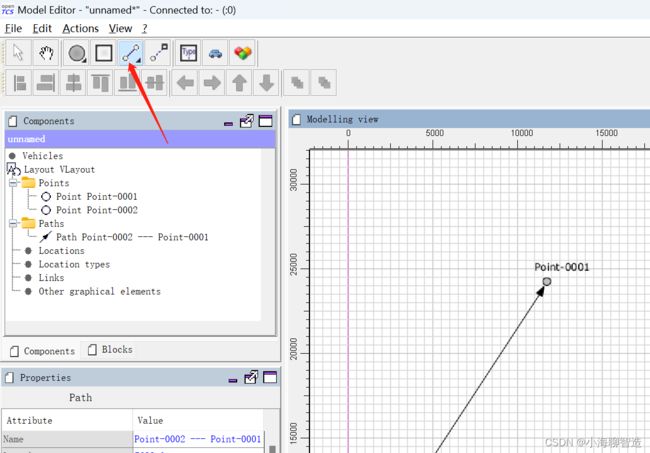
2. 路径(Paths)
即拓扑图中的边,用于连接节点,在仿真平台的地图中小车经Path由一个节点转入另一个节点以实现运动。
选择如下图这个图标,然后从第一个点 按住左键拖到第二点停下。
Path的属性:
(1)length(长度) 路径的长度,为实际长度,不随节点拖动而改变(很好理解)。
(2)maximum velocity and maximum reverse velocity (最大速度和反向速度)该路径允许通行的最大速度和最大反向速度。
(3)A routing cost(行走成本)走过该路径消耗的代价(用于后续计算最短路径等)
(4)locked flag(锁定标识)若该路径被标记,则表明该路径上已有小车正在通行。
3工位(Locations )
即执行某项工作/任务的位置,如装货(load)、卸货(unload)等。
Location的属性:
1)type(操作类型) 定义该工位能够完成的任务/工作的类型。
当在地图中加入一个工位(Location)后,

在图1工具栏下方的Components列表内会出现 Location type 项
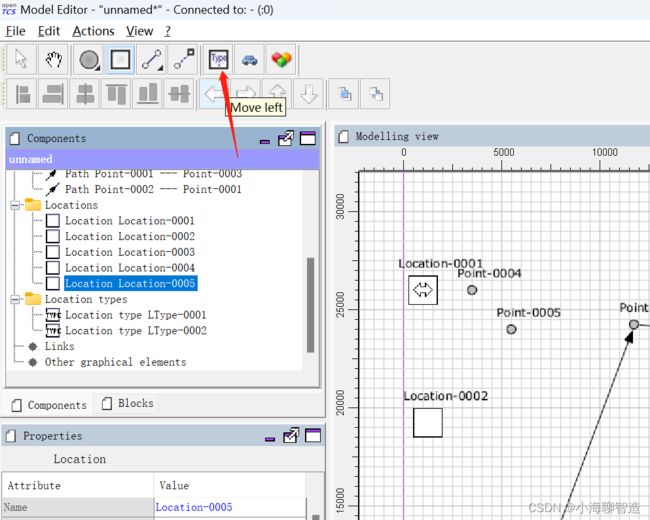

可以在工具栏中点击Location type图标生成新的Location type 在该Location type内可以进行命名、设置actions(活动)等操作,

待设置完成后,可以在工位(Location)的属性type中进行设置,即将actions(活动)附加到工位(Location)中,使该工位拥有该actions(活动)。
创建Location type中的actions
在左侧Coponents中选择Location type文件夹 添加新的Location type(工具栏中),点击该新的Location type,在左下侧属性中的actions中添加actions。
例如,添加新的Location type为Workstation,并添加load、unload到actions中。
新创建一个Location,点击Location,在其属性栏的type中选取Workstation,则将两者关联,此时新的Location内含有load、unload的actions。这是为后续创建订单做准备,小车在location附近节点(用link连接),进行load活动,若未设置load活动,则无法给小车创建任务。

2)links(相邻点/可达节点) 定义能够到达该工位的点的集合(至少有一个)。
其实link是单独的一个元素,可以由工具栏Location type图标左侧的图标进行设置,用于连接节点和工位(区别于Path,用虚线表示)。
如下图所示:

4. 小车(Vehicle ) 即小车实体的映射。
Vehicle的属性:
1)电量相关的属性
A critical energy level 低于小车电量水平的阈值:用于确定何时充电
A good energy level 高于小车良好电量水平的阈值:用于确定何时充电
A fully recharged energy level 小车满电的阈值:用于确定何时充电结束
A sufficiently recharged energy level 小车充足电量的阈值:用于确定何时充电结束

2)速度属性
A maximum velocity and maximum reverse velocity 小车的最大速度和最大反向速度

3)An integration level 定义小车以什么身份参与到系统中
…ignored: 车和其reported position 被忽略,此时车不会显示在仿真界面中不会参与运输。
…noticed: 车显示在平台中,但没有资源(节点)分配给该车的位置,不会参与运送。
…respected: 有资源分配给该车的位置,不会参与运送。
…utilized: 参与运送 可以被openTCS使用。
4)A set of processable transport order categories 小车可处理订单的种类(集合)
5)A route color 标记该小车行走路径的颜色
点击红色框可改变

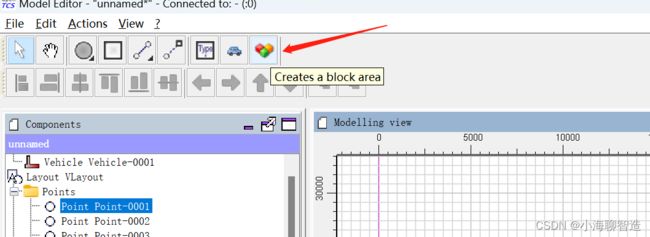
Block的属性:
1)A set of members 组成Block的节点的集合,节点和节点之间用“——”相连
2)type 有两种:A. Single vehicle only(单车) B. Same direction only(单方向)

Block的作用是防止不同小车运行到相同的位置导致局部路径阻塞,小车卡死。
默认的实现步骤(Default scheduler)是将一些易于阻塞的节点、路径设置为block,小车在当前位置时,会向上报告下一步运行位置,如下一步运行位置为block节点,则会进行检测,判断交通是否阻塞。
Block元素位于Components列表的第二栏

二 openTCS与操作相关的元素
1. 运输订单(Transport order )
如何创建订单:首先保存模型File->save model、连接到kernel FilePersist model、转化成操作模式 File->model->Operation mode
• Actions | Create transport order | 获取创建订单界面
在创建订单时,可以设置如下属性:
(1)destinations 目的地(可以是一系列的)
(2)deadline 订单处理的截止日期
(3)category 用于过滤可能分配给运输单的车辆
(4)intended vehicle 可选的预期车辆,告知调度员将运输订单分配给指定的车辆而不是自动选择一个
(5)dependencies 依赖项,完成该任务之前需要完成的任务,即为依赖项
2. 订单序列(Order sequence)
可以建立一个订单序列(多个订单)并由指定车辆按顺序完成该序列,一旦将车辆分配给订单序列,它就不会处理不属于该序列的运输订单,直到订单序列完成(针对一系列连续的复杂任务—可以采用订单序列)。
订单序列属性:
(1)transport orders 订单序列 若未设置complete flag 则可以不断添加订单到队列末尾
(2)A complete flag 表示不会向序列中添加其他传输订单(不能重设置)
(3)A failure fatal flag 表示如果序列中的一个运输订单失败,则其后的所有订单也应立即被视为失败
(4)A finished flag 表示订单序列已处理(并且车辆不再受其约束)
(5)An optional category 与Transport order类似 但优先级高于Transport order
(6)An optional intended vehicle 完成该任务序列的预期车辆(如果设置 则该订单所有任务均为该车完成)
3. 一般元素
Unique name
每个工厂模型和工厂操作元素都有一个唯一的名称 不同类型的元素也不可能赋相同的名称
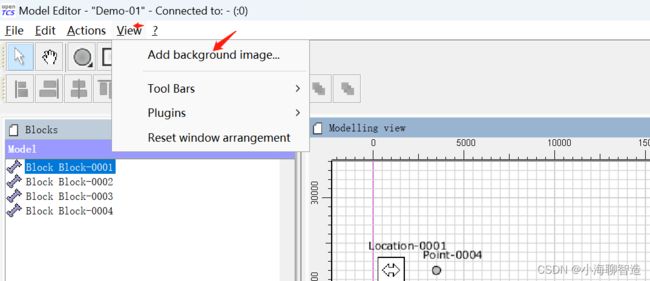
模板操作
添加背景图片
元素统计
