第33章llseek定位设备驱动实验
相信经过了前面章节的学习,大家已经对内核空间与用户空间的数据交互很是熟悉,但在之前的例子中都是对字符串的全部内容进行读写,假如现在有这样一个场景,将两个字符串依次进行写入,并对写入完成的字符串进行读取,如果仍采用之前的方式,第二次的写入值会覆盖第一次写入值,那要如何来实现上述功能呢?这就要轮到llseek出场了。
33.1 定位设备llseek
33.1.1 lseek函数的使用
在应用程序中使用lseek函数进行读写位置的调整,该函数的具体使用说明如下所示:
lseek函数
函数原型:
off_t lseek(int fd, off_t offset, int whence);
头文件:
#include
#include
函数作用:
移动文件的读写位置。
参数含义:
fd: 文件描述符;
off_t offset: 偏移量,单位是字节的数量,可以正负,如果是负值表示向前移动;如果是正值,表示向后移动。
whence:当前位置的基点,可以使用以下三组值。
SEEK_SET:相对于文件开头
SEEK_CUR:相对于当前的文件读写指针位置
SEEK_END:相对于文件末尾
**函数返回值:**成功返回当前位移大小,失败返回-1
函数使用示例:
把文件位置指针设置为5:
lseek(fd,5,SEEK_SET);
把文件位置设置成文件末尾:
lseek(fd,0,SEEK_END);
确定当前的文件位置:
lseek(fd,0,SEEK_CUR);
33.1.2 驱动程序的完善
上一小节中讲解的lseek函数如果要对设备文件生效,还需要完善相应的驱动程序。lseek函数会调用file_operation结构体中的llseek接口,所以需要对驱动中的llseek函数进行填充,并且完善read和write函数中偏移相关的部分。
下面对相关API接口函数进行填充:
llseek函数完善:
llseek填充完成的函数如下所示:
static loff_t cdev_test_llseek(struct file *file, loff_t offset, int whence)
{
loff_t new_offset;//定义loff_t类型的新的偏移值
switch(whence)//对lseek函数传递的whence参数进行判断
{
case SEEK_SET:
if(offset < 0){
return -EINVAL;
break;
}
if(offset > BUFSIZE){
return -EINVAL;
break;
}
new_offset = offset;//如果whence参数为SEEK_SET,则新偏移值为offset
break;
case SEEK_CUR:
if(file->f_pos + offset > BUFSIZE){
return -EINVAL;
break;
}
if(file->f_pos + offset < 0){
return -EINVAL;
break;
}
new_offset = file->f_pos + offset;//如果whence参数为SEEK_CUR,则新偏移值为file->f_pos + offset,file->f_pos为当前的偏移值
break;
case SEEK_END:
if(file->f_pos + offset < 0){
return -EINVAL;
break;
}
new_offset = BUFSIZE + offset;//如果whence参数为SEEK_END,则新偏移值为BUFSIZE + offset,BUFSIZE为最大偏移量
break;
default:
break;
}
file->f_pos = new_offset;//更新file->f_pos偏移值
return new_offset;
}
在第4行使用switch语句对传递的whence参数进行判断,whence在这里可以有三个取值,分别为SEEK_SET、SEEK_CUR和SEEK_END。
在6-16、17-28、29-38行代码中,分别对三个参数所代表的功能进行实现,其中需要注意的是file->f_pos指的是当前文件的偏移值。
在第40行和41行分别对f_pos偏移值进行更新,对新的偏移值进行返回。
read接口函数完善:
填充完成的read接口函数如下所示:
static ssize_t cdev_test_read(struct file *file, char __user *buf, size_t size, loff_t *off)
{
loff_t p = *off;//将读取数据的偏移量赋值给loff_t类型变量p
int i;
size_t count = size;
if(p > BUFSIZE){//如果当前偏移值比最大偏移量大则返回错误
return -1;
}
if(count > BUFSIZE - p){
count = BUFSIZE - p;//如果要读取的偏移值超出剩余的空间,则读取到最后位置
}
if(copy_to_user(buf,mem+p,count)){//将mem中的值写入buf,并传递到用户空间
printk("copy_to_user error \n");
return -1;
}
for(i=0;i<20;i++){
printk("buf[%d] is %c\n",i,mem[i]);//将mem中的值打印出来
}
printk("mem is %s,p is %llu,count is %d\n",mem+p,p,count);
*off = *off + count;//更新偏移值
return count;
}
相较于之前的read接口函数,在第7行和第10行分别加入了对偏移值p和读取数量进行判定,在第13行通过偏移值p进行内核空间和用户空间数据的传递,最后在第21行对偏移值进行更新。
write接口函数完善:
write接口函数的完善和read接口函数相似,填充完成的write接口函数如下所示:
static ssize_t cdev_test_write(struct file *file, const char __user *buf, size_t size, loff_t *off)
{
loff_t p = *off;//将写入数据的偏移量赋值给loff_t类型变量p
size_t count = size;
if(p > BUFSIZE){//如果当前偏移值比最大偏移量大则返回错误
return 0;
}
if(count > BUFSIZE - p){
count = BUFSIZE - p;//如果要写入的偏移值超出剩余的空间,则写入到最后位置
}
if(copy_from_user(mem+p,buf,count)){//将buf中的值,从用户空间传递到内核空间
printk("copy_to_user error \n");
return -1;
}
printk("mem is %s,p is %llu\n",mem+p,p);//打印写入的值
*off = *off + count;//更新偏移值
return count;
}
相较于之前的write接口函数,在第7行和第10行分别加入了对偏移值p和读取数量进行判定,在第13行通过偏移值p进行内核空间和用户空间数据的传递,最后在第18行对偏移值进行更新。
至此,关于定位设备相关的API接口函数就都填充完成了,将在下一小节进行定位设备驱动实验代码的编写。
33.2 实验程序编写
33.2.1 编写测试 APP
本实验对应的应用程序网盘路径为:iTOP-RK3568开发板【底板V1.7版本】\03_【iTOP-RK3568开发板】指南教程\02_Linux驱动配套资料\04_Linux驱动例程\26\app。
首先来编写应用测试代码llseek.c,编写好的代码如下所示:
#include 33.2.2 驱动程序编写
本实验对应的网盘路径为:iTOP-RK3568开发板【底板V1.7版本】\03_【iTOP-RK3568开发板】指南教程\02_Linux驱动配套资料\04_Linux驱动例程\26\module。
编写好的驱动程序llseek.c如下所示:
#include 33.3 运行测试
33.3.1 编译驱动程序
在上一小节中的llseek.c代码同一目录下创建 Makefile 文件,Makefile 文件内容如下所示:
export ARCH=arm64#设置平台架构
export CROSS_COMPILE=aarch64-linux-gnu-#交叉编译器前缀
obj-m += llseek.o #此处要和你的驱动源文件同名
KDIR :=/home/topeet/Linux/linux_sdk/kernel #这里是你的内核目录
PWD ?= $(shell pwd)
all:
make -C $(KDIR) M=$(PWD) modules #make操作
clean:
make -C $(KDIR) M=$(PWD) clean #make clean操作
对于Makefile的内容注释已在上图添加,保存退出之后,来到存放llseek.c和Makefile文件目录下,如下图(图 33-1)所示:
![]()
图 33-1
然后使用命令“make”进行驱动的编译,编译完成如下图(图 33-2)所示:

图 33-2
编译完生成 llseek.ko目标文件,如下图(图 33-3)所示:
![]()
图 33-3
至此驱动模块就编译成功了,下面交叉编译应用程序。
33.3.2 编译应用程序
来到存放应用程序llseek.c的文件夹下,使用以下命令对llseek.c进行交叉编译,编译完成如下图(图 33-4)所示:
aarch64-linux-gnu-gcc -o read read.c -static

图 33-4
生成的llseek文件就是之后放在开发板上运行的可执行文件,至此应用程序的编译就完成了。
33.3.3 运行测试
开发板启动之后,使用以下命令进行驱动模块的加载,如下图(图 33-5)所示:
insmod llseek.ko

图 33-5
然后使用以下命令运行可执行文件llseek,运行结果如下图(图 33-6)所示:
./llseek
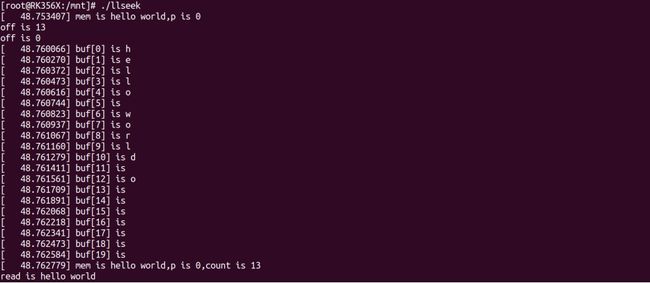
图 33-6
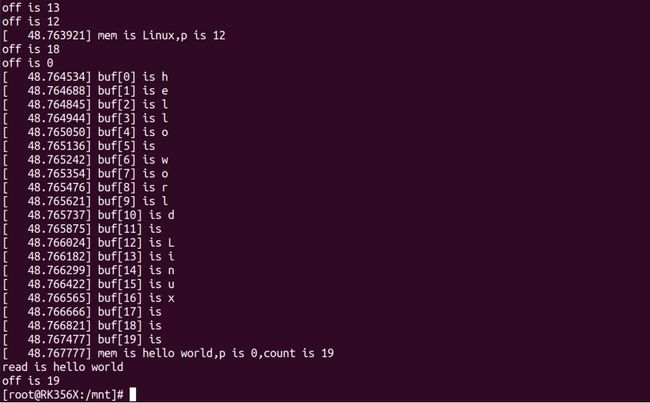
图 33-7
然后使用以下命令卸载对应的驱动,如下图(图 33-8)所示:
rmmod timer_dev
![]()
图 33-8
【最新驱动资料(文档+例程)】
链接 https://pan.baidu.com/s/1M4smUG2vw_hnn0Hye-tkog
提取码:hbh6
【B 站配套视频】
https://b23.tv/XqYa6Hm
【RK3568 购买链接】
https://item.taobao.com/item.htm?spm=a1z10.5-c-s.w4002-2245
图片转存中…(img-6TIBMyoE-1694396940826)]
图 33-5
然后使用以下命令运行可执行文件llseek,运行结果如下图(图 33-6)所示:
./llseek
[外链图片转存中…(img-TAu0A9FX-1694396940826)]
图 33-6
[外链图片转存中…(img-TwD1RmFO-1694396940826)]
图 33-7
然后使用以下命令卸载对应的驱动,如下图(图 33-8)所示:
rmmod timer_dev
[外链图片转存中…(img-fk8YLTpK-1694396940826)]
图 33-8
【最新驱动资料(文档+例程)】
链接 https://pan.baidu.com/s/1M4smUG2vw_hnn0Hye-tkog
提取码:hbh6
【B 站配套视频】
https://b23.tv/XqYa6Hm
【RK3568 购买链接】
https://item.taobao.com/item.htm?spm=a1z10.5-c-s.w4002-2245
2452613.11.2fec74a6elWNeA&id=669939423234