基于GDBus技术的IPC通信编程详解(1)
在搭建嵌入式Linux应用软件系统框架时,常常会将其划分为好几个模块,每个模块之间的通信方式多数时候都会用到d-bus技术。目前基于d-bus技术的几种编程框架有:glib-dbus,GDbus,QtDbus,dbus-python。这5种编程框架的复杂度有高有低,最简单的应该非QtDbus莫属了,最复杂的过程要属glib-dbus。鉴于我对GDBus的熟悉程度,这里只介绍GDBus的编程过程。
GDBus和glib-dbus都是由GNU组织开发的。GDBus可以认为是glib-dbus的升级版,其编程过程比起glib-dbus来要简单得多。网上有很多讨论glib-dbus编程的,但就是鲜有讲解GDBus编程过程的,于是便有了写下这篇文章的初衷。在展开讲解GDBus编程过程之前,希望各位看官具备下面列举的一些背景知识,以便更好的理解GDBus编程过程。不过也可以先跳过这些背景知识,在后面的讲解中如果有不理解的,可以再回过头来看。
1、d-bus介绍。这篇文章非常好。点击打开链接
2、glib-dbus和GDBus的比较。可以看这几篇文章。点击打开链接。点击打开链接
3、使用GVariant实现数据的序列号处理。点击打开链接
好了,下面我们切入主题——GDBus编程过程详解。
一,生成基于GDBus框架的接口库文件
1、数据抽象。
一套复杂的应用软件系统肯定会被划分成许多子模块,每个子模块只负责一个或几个有关的功能。在Linux下,我们可以将各个子模块实现为一个个进程。一套完整的系统,就需要各个进程相互配合通信,以交换数据和信息,完成应用系统要求的功能。比如,以时下流行的车载导航娱乐系统以及车载TBOX终端应用系统为例。
车载导航娱乐系统:我们可以将其划分为这些模块——USB多媒体、蓝牙电话、蓝牙音乐、收音机、导航、手机互联、倒车后视等。这些模块都将以进程的方式实现。这些进程间就需要通信,以达到一个有机有序稳定的车载导航娱乐系统。
车载TBOX终端应用系统:我们可以将其划分成这些模块——车辆数据采集模块、车辆数据处理模块、车辆数据存储模块、与TSP后台服务器通信模块,可能还附加与车内移动设备的通信模块。这些模块也都以进程的方式实现,他们之间的通信,我们都将采用GDBus技术。
这么多进程需要通信,可能有一对一,可能有一对多,多对多的通信方式。为简单起见,我们假设某个系统中就只有两个进程需要通信——我们称之为Server和Client。基于GDBus的进程间通信,最最重要的就是要定义好Server和Client之间的通信接口。在GDBus编程框架下,我们使用xml文件来描述接口。按照惯常的思路,就是一种数据,一个接口,N多种数据,就要N多个接口,这样的思路简单、便于理解。比如下面的xml文件:
上面的xml文件,共描述了三个接口:SetSomData、GetSomeData、SendMessage。其注释都已详细附上。
但是,这样的接口描述方式存在一个非常不便的地方——每种数据一个接口,如果进程间需要交换的数据类型很多的时候,就需要定义非常多的接口,这样xml文件就会变得庞大;而且如果进程间交换的某些数据量很大时,这样的接口描述就无能为力了。因此,有必要找到一种通用的,又能交换大量数据的接口描述方式。
基于上述目的,我们进一步抽象进程间的通信过程时发现——进程间通信不外乎就是下面这几种情况:
1、进程A从进程B中获取数据
2、进程A传递数据给进程B
3、进程B主动传递数据给进程A
我们用图来表示,大致如下: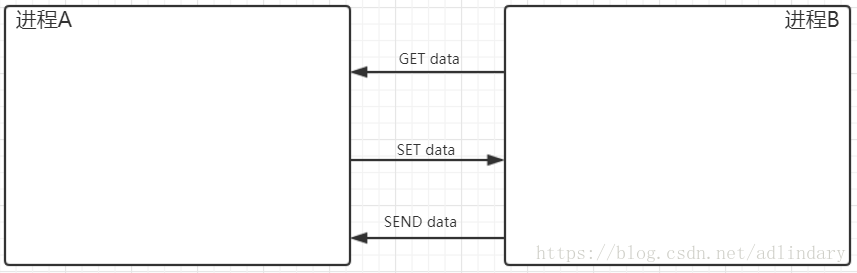
显然,这里的进程B就是Server端,进程A就是Client端。
Server端提供给Client端调用的接口应该有:GET、SET;同时Server端还应具备主动向客户端发数据的能力SEND。
因此,基于上述抽象,我们的GDBus接口描述文档应该如下,保存为interface-S.xml文件:
对于文档interface-S.xml中的数据类型 a*,a{ii},大家可以自行百度 点击打开链接,或者直接看glib的源码中GVariant数据类型(gvarianttype.h)。
至此,我们已经抽象出所有的通信接口。接下来,我们要做的工作就是,将这份通用的接口文件转换为C代码文件,以便加入到我们的工程中。
2、产生与xml文件对应的C源文件和库文件
我们使用GDBus提供的工具 gdbus-codegen来产生xml文件对于的C源文件。该工具在我们的Ubuntu系统中是默认安装了的。如果没有的话,需要自行下载glib库编译安装。
在终端执行如下命令:
gdbus-codegen --generate-c-code=libgdbusdemo_s interface-S.xml
或者写一个shell脚本,将上面的过程写进去,这样就不用每次敲代码,只需执行下脚本,即可产生我们需要的C源文件:libgdbusdemo_s.c libgdbusdemo_s.h。这两个源文件就是GDBus对上面的xml文件的翻译。两个源文件的内容,这里不粘贴出来,大家可以自己试试,然后看看这两个文件里面到底有什么神秘的东东。
至此,我们就可以将这两个文件加入到我们的工程中,一起和我们的其他源文件参与编译了。
但是,这还不是最合理的设计,我们的设计应该遵循模块化设计思想,所以,我们可以将这两个文件单独做成一个静态库。在编译我们的工程项目时,链接这个库即可。Linux下,从源文件生成静态库的方法,大家应该不陌生吧。按照下面的步骤即可实现:
1、gcc -c libgdbusdemo_s.c
2、ar crv libgdbusdemo_s.a libgdbusdemo_s.o
这样就生成了接口库文件 libgdbusdemo_s.a。该库文件server端和client都要用到,只是server端和client端所调用的接口不一样而已。
其实,这第2步的整个过程,都可以写入shell脚本文件中,然后保存为make.sh,简化了后续的开发:
#!/bin/bash
gdbus-codegen --generate-c-code=libgdbusdemo_s interface-S.xml
export C_INCLUDE_PATH="$C_INCLUDE_PATH:/usr/include/glib-2.0:/usr/lib/i386-linux-gnu/glib-2.0/include:/usr/include:/usr/include/gio-unix-2.0"
gcc -c libgdbusdemo_s.c
ar crv libgdbusdemo_s.a libgdbusdemo_s.o写到这里,我想大家的心里面也许有这样一个念头了:前面的这些过程,其目的就是一个——生成一个接口库文件。
接口库文件有了,那么接下来就是我们怎么使用这个库文件里面提供的各种函数来实现我们的server端和client端通信。下面就展开来讲。
二、GDBus编程阶段
基于软件设计的原则——低耦合高内聚、可扩展性等,我们大致可画出server端和client端的通信框图如下:
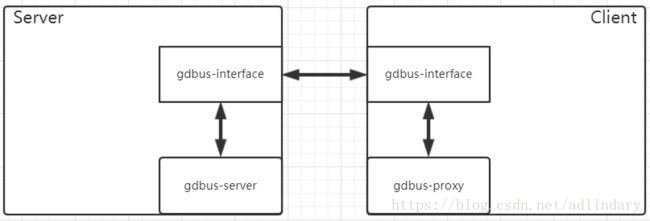
1、gdbus-interface模块:是对前面的接口库提供的单元接口函数的进一步封装。server端和client的封装的函数是有差异的。后续的讲解会提到如何封装。
2、gdbus-server:对gdbus-interface的进一步封装,使其提供给server的其他模块的接口更加简单、方便。
3、gdbus-proxy:也是对gdbus-interface的进一步封装,使其提供给client其他模块的接口更加简单、方便。
先讲Server端的编程过程。
1、Server端编程
基于GDBus的server端,可以抽象成两大模块:数据接收/发送的gdbus-interface模块、解析/封装通信数据的gdbus-server模块。
gdbus-interface模块向server中的其他模块暴露的接口有:
initialize,deinitialize,run,sendmessage。具体代码如下(gdbusiface.h):
#ifndef GDBUS_INTERFACE_H
#define GDBUS_INTERFACE_H
#include "../common/common.h"
#include "../interface-xml/libgdbusdemo_s.h"
#ifdef __cplusplus
extern "C"{
#endif
typedef void (*callback_client_request)(GVariant* input_message, GVariant** output_message);
gboolean InitGdbusServer(const gchar* bus_name,const gchar* object_path, callback_client_request callback_funtion);
void run();
gboolean DeinitGdbusServer();
gboolean SendMessage(GVariant* server_message);
#ifdef __cplusplus
}
#endif
#endifgdbusiface.cpp:
#include "gdbusiface.h"
#include "log.h"
static void bus_acquired_cb(
GDBusConnection* connection,
const gchar* bus_name,
gpointer user_data);
static void name_acquired_cb(
GDBusConnection* connection,
const gchar* bus_name,
gpointer user_data);
static void name_lost_cb(
GDBusConnection* connection,
const gchar* bus_name,
gpointer user_data);
static gboolean handle_client_request (
ComCompanyProjectDemoS *object,
GDBusMethodInvocation *invocation,
GVariant *arg_input_array);
static GMainLoop *g_mainloop = NULL;
static guint g_gdbus_own_name;
static ComCompanyProjectDemoS *g_Proxy = NULL;
static ComCompanyProjectDemoS *g_Skeleton = NULL;
static callback_client_request g_callback_function;
const gchar* g_object_path;
gboolean InitGdbusServer(const gchar* bus_name, const gchar* object_path, callback_client_request callback_func)
{
gboolean bRet = TRUE;
GError *pConnError = NULL;
GError *pProxyError = NULL;
GDBusConnection *pConnection = NULL;
/** init for usage of "g" types */
#if !GLIB_CHECK_VERSION(2,35,0)
g_type_init ();
#endif
/** create main loop, but do not start it. */
g_mainloop = g_main_loop_new(NULL, FALSE);
/** first step: connect to dbus */
g_gdbus_own_name = g_bus_own_name(G_BUS_TYPE_SESSION,//session type
bus_name,//own gdbus bus name
G_BUS_NAME_OWNER_FLAGS_NONE,
&bus_acquired_cb,
&name_acquired_cb,
&name_lost_cb,
NULL,
NULL);
g_object_path = object_path;
g_callback_function = callback_func;
return bRet;
}
gboolean DeinitGdbusServer()
{
gboolean bRet = FALSE;
if(0 != g_mainloop)
{
g_main_loop_quit(g_mainloop);
g_main_loop_unref(g_mainloop);
g_bus_unown_name(g_gdbus_own_name);
bRet = TRUE;
g_mainloop = NULL;
usleep(10000);//wait for glib recycle its resources.
if(g_Proxy)
{
g_object_unref(g_Proxy);
}
g_Proxy = NULL;
}
return bRet;
}
void run()
{
/** Start the Main Event Loop which manages all available sources of events */
g_main_loop_run( g_mainloop );
}
static void bus_acquired_cb(GDBusConnection *connection,
const gchar *bus_name,
gpointer user_data)
{
GError *pError = NULL;
/** Second step: Try to get a connection to the given bus. */
g_Skeleton = com_company_project_demo_s_skeleton_new();
/** Third step: Attach to dbus signals. */
(void) g_signal_connect(g_Skeleton, "handle-client-request", G_CALLBACK(handle_client_request), NULL);
//第三步非常重要。只有将信号”handle-client-request“和信号处理函数绑定到一起,并连接到gdbus服务上,server端才能接收到client端的数据请求
/** Fourth step: Export interface skeleton. */
(void) g_dbus_interface_skeleton_export(G_DBUS_INTERFACE_SKELETON(g_Skeleton),
connection,
g_object_path,
&pError);
if(pError != NULL)
{
g_error_free(pError);
g_main_loop_quit(g_mainloop);
}
}
static void name_acquired_cb(GDBusConnection *connection,
const gchar *bus_name,
gpointer user_data)
{
;
}
static void name_lost_cb(GDBusConnection *connection,
const gchar *bus_name,
gpointer user_data)
{
if(connection == NULL)
{
//LOGMSG(OUTPUT,("name_lost_cb call, Error: Failed to connect to dbus.\n"));
}
else
{
//LOGMSG(OUTPUT, ("name_lost_cb call, Error: Failed to obtain bus name: %s.\n", FRD012D_MCU_GDBUS_BUS_S_NAME));
}
DeinitGdbusServer();//
}
static gboolean handle_client_request(ComCompanyProjectDemoS *object, GDBusMethodInvocation *invocation, GVariant *arg_input_array)
{//client端对server端的数据请求,都是通过此接口进入到server系统中来的。
if(g_callback_function)
{
GVariant* output_msg = NULL;
g_callback_function(arg_input_array, &output_msg);//通过回调方式,将接收到的数据提交给数据处理模块。如果是我们的系统是“一对多”的架构,那么,这里可以将接收到的数据放入数据缓存buffer中,而不是直接回调处理函数,不然的话,无法处理大量客户端的大批量数据请求操作!
if(output_msg) com_company_project_demo_s_complete_client_request(object, invocation, output_msg, 1);//数据处理完成后,将client端需要的数据传回。如果是“一对多”架构,这个函数就不是在此处被调用,应该会被拆分为另外一个接口。
}
return TRUE;
}
gboolean SendMessage(GVariant *server_message)
{
if(g_Skeleton != NULL)
{
com_company_project_demo_s_emit_server_message(g_Skeleton,server_message);// .
g_variant_unref(server_message);
return TRUE;
}
return FALSE;
}这篇文章只是第一篇。有兴趣的同学,可以继续往下读——基于GDBus技术的IPC通信编程详解(2)
作为一枚程序猿,没有什么比开放源码更爽的事了。哈哈,想要源码的童鞋,戳这里点击打开链接