15 玩转STM32之IIC通信(芯片硬件篇)
15.1 IIC控制器说明(硬件部分)
在14 玩转STM32之IIC通信(软件模拟篇)我们讲了软件模拟的方式,本章讲解芯片自带的硬件部分(并非所有的芯片都含有IIC,像51系列的是没有的,但是绝大多数是有的,根据我用过的S32、STM32、HC32、CH32、GD32都是有的,目前我只见过51的没有、STM8也有这个可能分系列吧,我用的有,其他的不清楚)
15.1.1 STM32 IIC通信主要特性
STM32F429微控制器继承了3个IIC(内部集成的)软件模拟和硬件模拟的功能是一样的。
具备多主模式功能,同一接口可以用作主从模式。
7 位/10 位寻址以及广播呼叫的生成和检测。
支持不同的通信速度:
— 标准速度(高达 100 kHz)
— 快速速度(高达 400 kHz)
状态标志:
— 发送/接收模式标志
— 字节传输结束标志
— I2C 忙碌标志
错误标志:
— 主模式下的仲裁丢失情况
— 地址/数据传输完成后的应答失败
— 检测误放的起始位和停止位
— 禁止时钟延长后出现的上溢/下溢
带 DMA 功能的 1 字节缓冲(减轻MCU工作)
兼容SMBus2.0和PMBus。
具体的功能作用可参看数据手册(648页中文版)
总结:
STM32的I2C外设可用作通讯的主机及从机,支持100Kbit/s和400Kbit/s的速率,支持7位、10位设备地址,支持DMA数据传输,并具有数据校验功能。
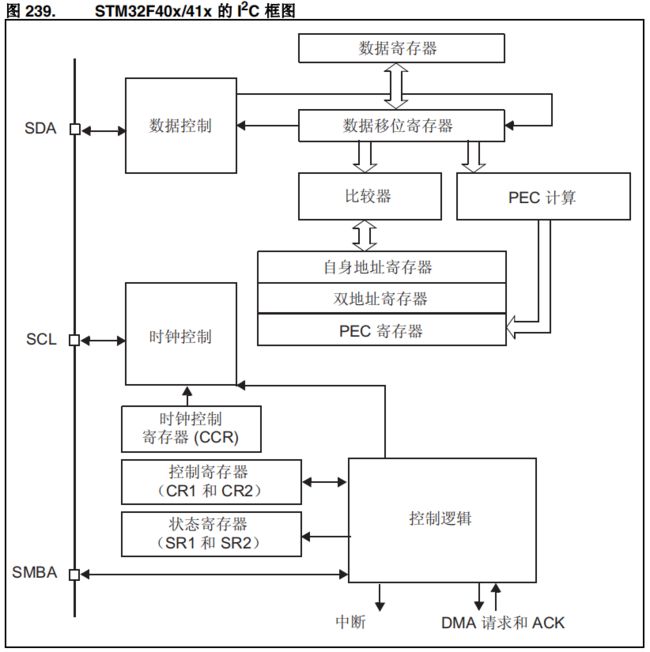
15.1.2 STM32 IIC结构
IIC通过SCL和SDA两个引脚完成与其他器件进行通信,如下图IIC内部结构图:

IIC引脚对照表:

IIC有四种工作模式:从发送器、从接收器、主发送器、主接收器模式四种。
默认情况下,IIC在从模式下工作。接口在生成起始位后会自动由从模式切换为主模式,并在出现重在丢失或生成停止位的时候,从模式切换为从模式,进而实现多主模式功能。
15.1.3 STM32 IIC主模式
在主模式下,I2C接口会启动数据传输(发送起始信号和器件地址,地址始终在主模式下发送),并生成时钟信号(SCL),将需要发送的数据写入数据寄存器,并通过数据移位寄存器和数据控制逻辑(输出),将数据一位位发送到SDA数据线。通信的时钟由主机的时钟控制逻理生成,可以在标准速度或快速速度模式下工作。通信的工作模式由控制寄存器(CR1和CR2)的不同配置控制,状态寄存器体现通信过程中产生的一系列状态,根据不同的工作模式和通信状态,控制逻辑负责实现完整的通信过程。串行数据传输始终在出现起始位时开始,在出现停止位时结束。起始位和停止位均在主模式下由软件生成。
12C控制器自动检测从机发送回来的ACK信号,并置位状态寄存器相应的状态位,程序通过检测状态寄存器(SR1和SR2)的状态位,判断数据是否发送成功。
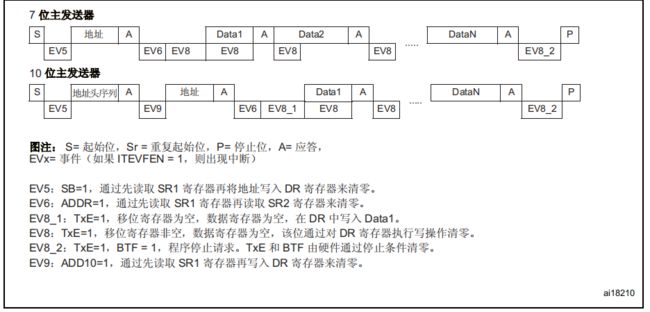
1-主发送器模式
I2C控制器产生开始信号(S),然后通过检测EV5事件,判断是否启动成功。
在满足EV5事件后,主机发送器件地址+W,然后通过检测EV6事件、判断是否发送器件地址成功。
在满足EV6事件后,主机发送数据,然后通过检测EV8事件,判断是否发送数据成功。在发送完最后一个数据后,主机发送结束信号§结束通信过程。
如图:主发送器模式下IIC通信示意图:
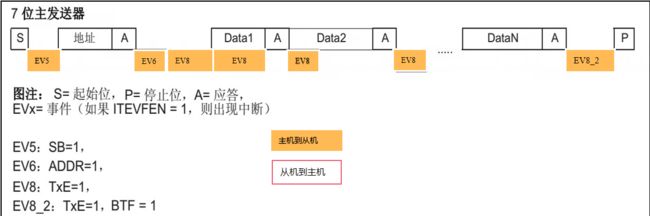
EV5:总线正在进行通信(BUSY=1),主/从模式(MSL=1)及起始位是否己经发送(SB=1)。
EV6:处于发送器或接收器状态(TRA=1),正在进行通信(BUSY=1),主/从模式(MSL=1).
数据寄存器是否为空(TXE=1),地址是否已发送(ADDR=1,主模式)。
EV8:处于发送器或接收器状态(TRA=1),正在进行通信(BUSY=1),主/从模式(MSL=1).
数据寄存器是否为空(TXE=l),字节是否传输完成(BTF=1,主模式)。
2-主接收器模式
I2C控制器产生开始信号,然后通过检测EV5事件,判断是否启动成功。
在满足EV5事件后,主机发送器件地址,然后通过检测EV6事件,判断是否发送器件地址成功。
在满足EV6事件后,主机准备接收从机发送过来的数据,然后通过检测EV7事件,判断是否接收数据成功。如果接收的不是最后一个数据的话,则主机发送ACK信号给从机。
如果接收的是最后一个数据的话,则主机发送一个NACK信号,并发送结束信号,结束通信。
EV7:正在进行通信(BUSY=1),主/从模式(MSL=1),数据寄存器非空(RXNE=1)。
主接收器模式下I2C通信示意图如图:
15.1.4 IIC 从模式
在从模式下,根据写入自身地址寄存器的地址(从模式下的器件地址),l2C控制器通过比较器能够识主机发送过来的地址是否和其自身地址(7位或10位)一致。在地址匹配的情况下,根据读写控制状态,通过数据控制逻辑可以接收(写)或发送(读)数据。
1-从发送器模式
在检测到开始信号后,I2C控制器通过检测EV1事件,判断主机发送过来的器件地址是否和本机地址一致。
在满足EV1事件后,从机发送一个ACK信号给主机,将数据发送给主机,并通过检测EV3事件,判断是否发送数据成功。在发送完最后一个数据后,从机检测到NACK信号和结束信号,结束通信。
EV1:正在进行通信(BUSY=1),接收到的地址匹配(ADDR=1,从模式)。
EV3:处于发送器或接收器状态(TRA=1),正在进行通信(BUSY=l),数据寄存器是否为
空(TXE=1)。
从发送器模式下I2C通信示意图如图:

15.1.5 12C控制碍中断
I2C控制器有2个中断向量:一个中新由成功的地址/数期字管传输事件发另一个中新由银误状态触发。
I2C控制器支持多种中断事件的请求,便于实时响应一些紧急事务,为了提高CPU利用率。选常在I2C控制器处于从模式时,使用中新方式来响应一系列事务的处理。例如,从模式下数西的接收、发送、停止及错误等,I2C控制器中斯事件如图所示:

15.2 IIC应用步骤和常用库函数
15.2.1 IIC应用步骤
以IIC1为例这里,其他的与这是一样的.
(1)使能IIC1时钟和通信线复用引脚端口GPIOB的时钟。
使能IIC通信时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1, ENABLE); //I2C2时钟使能
GPIO时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE); //GPIO时钟使能
(2)初始化引脚
/*GPIO引脚复用*/
GPIO_PinAFConfig(GPIOB, GPIO_PinSource6, GPIO_AF_I2C1); //将PB6复用给I2C1
GPIO_PinAFConfig(GPIOB, GPIO_PinSource7, GPIO_AF_I2C1); //将PB7复用给I2C1
/*初始化GPIO */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_OD;//开漏输出模式
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//使能上拉
GPIO_Init(GPIOB, &GPIO_InitStructure);// 初始化PB6:SCL
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_Init(GPIOB, &GPIO_InitStructure);// 初始化PB7:SDA
(3)初始化IIC工作模式
/* I2C 配置 */
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C; //I2C模式 */
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2; // SCL 时钟线的占空比
I2C_InitStructure.I2C_OwnAddress1 =I2C_OWN_ADDRESS7; // 从机时,自身器件地址
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable ; // 使能ACK相应
//7bit的寻址模式
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_ClockSpeed = 400000; // 通信速率<=400K
I2C_Init(I2C1, &I2C_InitStructure); // I2C2 初始化
(4)使能IIC1控制器
I2C_Cmd(I2C1, ENABLE); // 使能 I2C2
(5)使能IIC ACK应答
I2C_AcknowledgeConfig(I2C1, ENABLE); //使能IIC ACK功能
(6)中断使能
如果需要使用中断,则需要配置NVIC和使能IIC中断。
15.3.2 常用库函数
与I2C相关的函数和宏都被定义在以下两个文件中。
头文件:stm32f4xx_i2c.h.
源文件:stm32f4xx i2c.c。
1-I2C初始化函数
void 12C_Init(12C_TypeDef* I2Cx,I2C_InitTypeDef* 12C_InitStruct);
参数1:I2C_TypeDef*I2Cx,I2C应用对象,一个结构体指针,表示形式是I2C1、I2C2和I2C3,以宏定义形式定义在stm32f4xx_.h文件中。例如:
#define I2C1 ((12C_TypeDef *) I2C1_BASE)
#define I2C2 ((12C_TypeDef *) 12C2_BASE)
#define I2C3 ((I2C_TypeDef *) I2C3_BASE)
参数2:I2C_InitTypeDef* I2C_InitStruct,I2C应用对象初始化结构体指针,以自定义的结
构体形式定义在stm32f4xx i2c.h文件中。
typedef struct
{
uint32_t I2C_ClockSpeed;//时钟速度
uint16_t I2C_Mode;//工作模式
uint16 t I2C_DutyCycle;//时钟信号低电平/高电平的占空比
uint16_t I2C_OwnAddressl;//自身器件地址,从机时使用
uintl6_t 12C_Ack;//ACK应答使能
uint16_t I2C_AcknowledgedAddress;/12C寻址模式
}12C_InitTypeDef;
成员1:uint32_tI2C_ClockSpced,时钟速度,根据自定义的通信速度,库程序会将I2C配置为标准模式(≤100kHz)或快速模式。
成员2: uintl6_tI2C_Mode,工作模式,可以是12C模式或SMBus模式,有如下定义:
#define I2C_Mode_12C ((uintl6_t)0x0000) //I2C模式
#define 12C_Mode_SMBusDevice ((uint16_t)0x0002)//SMBus设备模式
#define I2C_Mode_SMBusHost ((uint16_t)0x000A) //SMBus 主机模式
成员3:12C DutyCycle,定义时钟信号低电平/高电平的占空比,有如下定义:
#define I2C_DutyCycle_16_9 ((uintl6_t)0x4000)//时钟信号低电干/高电干=16/9
#define I2C_DutyCycle_2 ((uintl6_t)0xBFFF)//时钟信号低电平/高电平=2
成员4:I2C_OwnAddress1,定义从机通信时的自身器件地址。
成员5:I2C_ Ack,定义ACK应答使能,有如下定义。
#define l2C_Ack_Enable ((uint16_t)0x0400)//使能ACK应答使能
#define l2C Ack Disable ((uintl6_t1)0x0000)//禁止使能ACK应答使能
成员6:I2C_AcknowledgedAddress,定义I2C寻址模式,有如下定义。
#define l2C_AcknowledgedAddress_7bi t ((uint16_t)0x4000)//7 (位地址寻址模式
#define I2C_AcknowledgedAddress_10bit ((uint16_1)0xC000)//10位地址寻址模式
2-IIC 使能函数
void 12C_Cmd(I2C_TypeDef* 12Cx,FunctionalState NewState);
参数2:FunctionalState NewState,使能或禁止12CACK应答功能。
ENABLE:使能I2C ACK应答功能。
DISABLE:禁止I2CACK应答功能。
例如,使能I2C1 ACK应答功能:
I2C_Cmd (12C1,ENABLE);
参数1:I2C应用对象,同I2C初始化函数参数1。
4-I2C检测通信事件函数
ErrorStatus I2C_CheckEvent(12C_TypeDef* 12Cx,uint32_t I2C EVENT);
参数1:I2C应用对象,同12C初始化参数1。
参数2:uint32t I2C EVENT,定义通信事件,有EVI~EV9事件,它D分国定 不同的I2C通信状态。例如,EV8为主机接收到字节数据事件。
#deline I2C_EVENT_MASTER_BYTE_TRANSMITTED ((uint)2_1Cx00070084
其他的定义参见头文件stm32f4xx_i2c.h文件中的定义。
例如,等待I2C2主机发送完一个字节(EV8)。
while(!12C_CheckEvent(I2C2,12C_EVENT_MASTER_BVTE_ TRANSMITTED)
返回:成功或失败、ErorSiuatus是一个枚举类型,定义如下:
typedef enum {ERROR=0,SUCCESS=!ERROR}ErrorStatus;
5-I2C开始值号
/**
* @brief Generates I2Cx communication START condition.
* @param I2Cx: where x can be 1, 2 or 3 to select the I2C peripheral.
* @param NewState: new state of the I2C START condition generation.
* This parameter can be: ENABLE or DISABLE.
* @retval None.
*/
void I2C_GenerateSTART(I2C_TypeDef* I2Cx, FunctionalState NewState)
6-I2C控制器产生结束信号函数
/**
* @brief Generates I2Cx communication STOP condition.
* @param I2Cx: where x can be 1, 2 or 3 to select the I2C peripheral.
* @param NewState: new state of the I2C STOP condition generation.
* This parameter can be: ENABLE or DISABLE.
* @retval None.
*/
void I2C_GenerateSTOP(I2C_TypeDef* I2Cx, FunctionalState NewState)
7-I2C控制器发送7位寻址地址函数
/**
* @brief Transmits the address byte to select the slave device.
* @param I2Cx: where x can be 1, 2 or 3 to select the I2C peripheral.
* @param Address: specifies the slave address which will be transmitted
* @param I2C_Direction: specifies whether the I2C device will be a Transmitter
* or a Receiver.
* This parameter can be one of the following values
* @arg I2C_Direction_Transmitter: Transmitter mode
* @arg I2C_Direction_Receiver: Receiver mode
* @retval None.
*/
void I2C_Send7bitAddress(I2C_TypeDef* I2Cx, uint8_t Address, uint8_t I2C_Direction)
8-I2C控制器发送一个字节的数据函数
/**
* @brief Sends a data byte through the I2Cx peripheral.
* @param I2Cx: where x can be 1, 2 or 3 to select the I2C peripheral.
* @param Data: Byte to be transmitted..
* @retval None
*/
void I2C_SendData(I2C_TypeDef* I2Cx, uint8_t Data)
9-I2C控制器接收一个字节的数据函数
/**
* @brief Returns the most recent received data by the I2Cx peripheral.
* @param I2Cx: where x can be 1, 2 or 3 to select the I2C peripheral.
* @retval The value of the received data.
*/
uint8_t I2C_ReceiveData(I2C_TypeDef* I2Cx)
10-I2C控制器获取最新的通信事件涵数
/**
* @brief Returns the last I2Cx Event.
* @param I2Cx: where x can be 1, 2 or 3 to select the I2C peripheral.
*
* @note For detailed description of Events, please refer to section I2C_Events
* in stm32f4xx_i2c.h file.
*
* @retval The last event
*/
uint32_t I2C_GetLastEvent(I2C_TypeDef* I2Cx)
以上就是这些部分,具体的其他部分请查看相关.c以及.h文件和数据手册。
15.3 应用
#include "bsp_i2c_ee.h"
#include "bsp_usart.h"
uint16_t EEPROM_ADDRESS;
static __IO uint32_t I2CTimeout = I2CT_LONG_TIMEOUT;
static uint32_t I2C_TIMEOUT_UserCallback(uint8_t errorCode);
/**
* @brief I2C 工作模式配置
* @param 无
* @retval 无
*/
void I2C_Config(void)
{
I2C_InitTypeDef I2C_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/*-------------------第1步--------------------*/
/*时钟使能*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2, ENABLE); //I2C2时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOH, ENABLE); //GPIO时钟使能
/*-------------------第2步--------------------*/
/*GPIO引脚复用*/
GPIO_PinAFConfig(GPIOH, GPIO_PinSource4, GPIO_AF_I2C2); //将PH4复用给I2C2
GPIO_PinAFConfig(GPIOH, GPIO_PinSource5, GPIO_AF_I2C2); //将PH5复用给I2C2
/*初始化GPIO */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_OD;//开漏输出模式
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//使能上拉
GPIO_Init(GPIOH, &GPIO_InitStructure);// 初始化PH4:SCL
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_Init(GPIOH, &GPIO_InitStructure);// 初始化PH5:SDA
/*-------------------第3步--------------------*/
/* I2C 配置 */
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C; //I2C模式 */
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2; // SCL 时钟线的占空比
I2C_InitStructure.I2C_OwnAddress1 =I2C_OWN_ADDRESS7; // 从机时,自身器件地址
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable ; // 使能ACK相应
//7bit的寻址模式
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_ClockSpeed = 400000; // 通信速率<=400K
I2C_Init(I2C2, &I2C_InitStructure); // I2C2 初始化
/*-------------------第4步--------------------*/
I2C_Cmd(I2C2, ENABLE); // 使能 I2C2
/*-------------------第5步--------------------*/
I2C_AcknowledgeConfig(I2C2, ENABLE); //使能IIC ACK功能
EEPROM_ADDRESS = 0xA0;//EEPROM器件地址
}
/**
* @brief 将缓冲区中的数据写到I2C EEPROM中
* @param
* @arg pBuffer:缓冲区指针
* @arg WriteAddr:写地址
* @arg NumByteToWrite:写的字节数
* @retval 无
*/
void I2C_Buffer_Write(u8* pBuffer, u8 WriteAddr, u16 NumByteToWrite)
{
u8 NumOfPage = 0, NumOfSingle = 0, Addr = 0, count = 0;
Addr = WriteAddr % I2C_PageSize;
count = I2C_PageSize - Addr;
NumOfPage = NumByteToWrite / I2C_PageSize;
NumOfSingle = NumByteToWrite % I2C_PageSize;
/* If WriteAddr is I2C_PageSize aligned */
if(Addr == 0)
{
/* If NumByteToWrite < I2C_PageSize */
if(NumOfPage == 0)
{
I2C_Page_Write(pBuffer, WriteAddr, NumOfSingle);
I2C_WaitEepromStandbyState();
}
/* If NumByteToWrite > I2C_PageSize */
else
{
while(NumOfPage--)
{
I2C_Page_Write(pBuffer, WriteAddr, I2C_PageSize);
I2C_WaitEepromStandbyState();
WriteAddr += I2C_PageSize;
pBuffer += I2C_PageSize;
}
if(NumOfSingle!=0)
{
I2C_Page_Write(pBuffer, WriteAddr, NumOfSingle);
I2C_WaitEepromStandbyState();
}
}
}
/* If WriteAddr is not I2C_PageSize aligned */
else
{
/* If NumByteToWrite < I2C_PageSize */
if(NumOfPage== 0)
{
I2C_Page_Write(pBuffer, WriteAddr, NumOfSingle);
I2C_WaitEepromStandbyState();
}
/* If NumByteToWrite > I2C_PageSize */
else
{
NumByteToWrite -= count;
NumOfPage = NumByteToWrite / I2C_PageSize;
NumOfSingle = NumByteToWrite % I2C_PageSize;
if(count != 0)
{
I2C_Page_Write(pBuffer, WriteAddr, count);
I2C_WaitEepromStandbyState();
WriteAddr += count;
pBuffer += count;
}
while(NumOfPage--)
{
I2C_Page_Write(pBuffer, WriteAddr, I2C_PageSize);
I2C_WaitEepromStandbyState();
WriteAddr += I2C_PageSize;
pBuffer += I2C_PageSize;
}
if(NumOfSingle != 0)
{
I2C_Page_Write(pBuffer, WriteAddr, NumOfSingle);
I2C_WaitEepromStandbyState();
}
}
}
}
/**
* @brief 写一个字节到I2C EEPROM中
* @param
* @arg pBuffer:缓冲区指针
* @arg WriteAddr:写地址
* @retval 无
*/
uint32_t I2C_Byte_Write(u8* pBuffer, u8 WriteAddr)
{
/* Send STRAT condition 启动操作*/
I2C_GenerateSTART(I2C2, ENABLE);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV5 and clear it 检测总线是否忙*/
while(!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(0);
}
/* Send EEPROM address for write 发送器件地址 写操作 */
I2C_Send7bitAddress(I2C2, EEPROM_ADDRESS, I2C_Direction_Transmitter);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV6 and clear it 等待ACK*/
while(!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(1);
}
/* Send the EEPROM's internal address to write to 发送器件内写地址 */
I2C_SendData(I2C2, WriteAddr);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV8 and clear it 等待ACK*/
while(!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(2);
}
/* Send the byte to be written 写数据*/
I2C_SendData(I2C2, *pBuffer);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV8 and clear it 等待ACK*/
while(!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(3);
}
/* Send STOP condition 停止操作*/
I2C_GenerateSTOP(I2C2, ENABLE);
return 1;
}
/**
* @brief 在EEPROM的一个写循环中可以写多个字节,但一次写入的字节数
* 不能超过EEPROM页的大小,AT24C02每页有8个字节
* @param
* @arg pBuffer:缓冲区指针
* @arg WriteAddr:写地址
* @arg NumByteToWrite:写的字节数
* @retval 无
*/
uint32_t I2C_Page_Write(u8* pBuffer, u8 WriteAddr, u8 NumByteToWrite)
{
I2CTimeout = I2CT_LONG_TIMEOUT;
while(I2C_GetFlagStatus(I2C2, I2C_FLAG_BUSY)) //检测IIC控制器是否忙 确认没有总线上没有通信
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(4);
}
/* Send START condition 启动操作*/
I2C_GenerateSTART(I2C2, ENABLE);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV5 ((uint32_t)0x00030001) and clear it 确认以下信息: BUSY-总线正在进行通信, MSL-主/从模式, and SB-起始位已经发送*/
while(!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(5);
}
/* Send EEPROM address for write 写器件地址 写操作*/
I2C_Send7bitAddress(I2C2, EEPROM_ADDRESS, I2C_Direction_Transmitter);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV6 ((uint32_t)0x00070082) and clear it 等待ACK 确认以下信息: TRA-发送器/接收器, BUSY-总线正在进行通信, MSL-主/从模式, TXE-数据寄存器为空, ADDR-地址已发送(主模式)*/
while(!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(6);
}
/* Send the EEPROM's internal address to write to 发送器件内写地址*/
I2C_SendData(I2C2, WriteAddr);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV8 and clear it 等待ACK ((uint32_t)0x00070084) 确认以下信息: TRA-发送器/接收器, BUSY-总线正在进行通信, MSL-主/从模式, TXE-数据寄存器为空 and BTF-字节传输完成 */
while(! I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(7);
}
/* While there is data to be written */
while(NumByteToWrite--)
{
/* Send the current byte 写数据*/
I2C_SendData(I2C2, *pBuffer);
/* Point to the next byte to be written */
pBuffer++;
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV8 and clear it 等待ACK ((uint32_t)0x00070084) 确认以下信息: TRA-发送器/接收器, BUSY-总线正在进行通信, MSL-主/从模式, TXE-数据寄存器为空 and BTF-字节传输完成*/
while (!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(8);
}
}
/* Send STOP condition 停止操作*/
I2C_GenerateSTOP(I2C2, ENABLE);
return 1;
}
/**
* @brief 从EEPROM里面读取一块数据
* @param
* @arg pBuffer:存放从EEPROM读取的数据的缓冲区指针
* @arg WriteAddr:接收数据的EEPROM的地址
* @arg NumByteToWrite:要从EEPROM读取的字节数
* @retval 无
*/
uint32_t I2C_Buffer_Read(u8* pBuffer, u8 ReadAddr, u16 NumByteToRead)
{
I2CTimeout = I2CT_LONG_TIMEOUT;
//*((u8 *)0x4001080c) |=0x80;
while(I2C_GetFlagStatus(I2C2, I2C_FLAG_BUSY)) //检测IIC控制器是否忙
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(9);
}
/* Send START condition 启动操作*/
I2C_GenerateSTART(I2C2, ENABLE);
//*((u8 *)0x4001080c) &=~0x80;
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV5 ((uint32_t)0x00030001) and clear it 确认以下信息: BUSY-总线正在进行通信, MSL-主/从模式, and SB-起始位已经发送*/
while(!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(10);
}
/* Send EEPROM address for write 写器件地址 写操作*/
I2C_Send7bitAddress(I2C2, EEPROM_ADDRESS, I2C_Direction_Transmitter);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV6 ((uint32_t)0x00070082) and clear it 等待ACK 确认以下信息: TRA-发送器, BUSY-总线正在进行通信, MSL-主/从模式, TXE-数据寄存器为空, ADDR-地址已发送(主模式)*/
while(!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(11);
}
// /* Clear EV6 by setting again the PE bit 清除事件6 实际测试去掉也没有出错*/
// I2C_Cmd(I2C2, ENABLE);
/* Send the EEPROM's internal address to write to 发送器件内读地址*/
I2C_SendData(I2C2, ReadAddr);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV8 and clear it 等待ACK ((uint32_t)0x00070084) 确认以下信息: TRA-发送器, BUSY-总线正在进行通信, MSL-主/从模式, TXE-数据寄存器为空 and BTF-字节传输完成 */
while(!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(12);
}
/* Send STRAT condition a second time 重亲启动操作*/
I2C_GenerateSTART(I2C2, ENABLE);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV5 ((uint32_t)0x00030001) and clear it 确认以下信息: BUSY-总线正在进行通信, MSL-主/从模式, and SB-起始位已经发送*/
while(!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(13);
}
/* Send EEPROM address for read 发送器件地址+1 读操作*/
I2C_Send7bitAddress(I2C2, EEPROM_ADDRESS, I2C_Direction_Receiver);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* Test on EV6 ((uint32_t)0x00030002) and clear it 等待ACK 确认以下信息: TRA-接收器, BUSY-总线正在进行通信, MSL-主/从模式, TXE-数据寄存器为空, ADDR-地址已发送(主模式)*/
while(!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(14);
}
/* While there is data to be read */
while(NumByteToRead)
{
I2CTimeout = I2CT_LONG_TIMEOUT;
if(NumByteToRead == 1)//最后一个数据的话
{
/* Disable Acknowledgement 禁止ACK 结束数据接收*/
I2C_AcknowledgeConfig(I2C2, DISABLE);
/* Send STOP Condition 停止操作*/
I2C_GenerateSTOP(I2C2, ENABLE);
}
else
/* Enable Acknowledgement to be ready for another reception 使能ACK 重复数据接收*/
I2C_AcknowledgeConfig(I2C2, ENABLE);
while(I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED)==0) //等待数据接收结束 ((uint32_t)0x00030040) BUSY-总线正在进行通信, MSL-主/从模式, and RXNE-数据寄存器非空 flags
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(3);
}
{
/* Read a byte from the device 读取数据*/
*pBuffer = I2C_ReceiveData(I2C2);
/* Point to the next location where the byte read will be saved */
pBuffer++;
/* Decrement the read bytes counter */
NumByteToRead--;
}
}
return 1;
}
/**
* @brief Wait for EEPROM Standby state
* @param 无
* @retval 无
*/
void I2C_WaitEepromStandbyState(void)
{
vu16 SR1_Tmp = 0;
do
{
/* Send START condition */
I2C_GenerateSTART(I2C2, ENABLE);
/* Read I2C2 SR1 register */
SR1_Tmp = I2C_ReadRegister(I2C2, I2C_Register_SR1);
/* Send EEPROM address for write */
I2C_Send7bitAddress(I2C2, EEPROM_ADDRESS, I2C_Direction_Transmitter);
}while(!(I2C_ReadRegister(I2C2, I2C_Register_SR1) & 0x0002));
/* Clear AF flag */
I2C_ClearFlag(I2C2, I2C_FLAG_AF);
/* STOP condition */
I2C_GenerateSTOP(I2C2, ENABLE);
}
/**
* @brief Basic management of the timeout situation.
* @param errorCode:错误代码,可以用来定位是哪个环节出错.
* @retval 返回0,表示IIC读取失败.
*/
static uint32_t I2C_TIMEOUT_UserCallback(uint8_t errorCode)
{
/* Block communication and all processes */
return 0;
}
/*********************************************END OF FILE**********************/
#ifndef __I2C_EE_H
#define __I2C_EE_H
#include "stm32f4xx.h"
/* AT24C01/02每页有8个字节 */
//#define I2C_PageSize 8
/* AT24C04/08A/16A每页有16个字节 */
#define I2C_PageSize 16
/* STM32 I2C 快速模式 */
#define I2C_Speed 400000
/* 这个地址只要与STM32外挂的I2C器件地址不一样即可 */
#define I2C_OWN_ADDRESS7 0X0A
/*I2C接口*/
#define EEPROM_I2C I2C2
#define EEPROM_I2C_CLK RCC_APB1Periph_I2C2
#define EEPROM_I2C_CLK_INIT RCC_APB1PeriphClockCmd
#define EEPROM_I2C_SCL_PIN GPIO_Pin_4
#define EEPROM_I2C_SCL_GPIO_PORT GPIOH
#define EEPROM_I2C_SCL_GPIO_CLK RCC_AHB1Periph_GPIOH
#define EEPROM_I2C_SCL_SOURCE GPIO_PinSource4
#define EEPROM_I2C_SCL_AF GPIO_AF_I2C2
#define EEPROM_I2C_SDA_PIN GPIO_Pin_5
#define EEPROM_I2C_SDA_GPIO_PORT GPIOH
#define EEPROM_I2C_SDA_GPIO_CLK RCC_AHB1Periph_GPIOH
#define EEPROM_I2C_SDA_SOURCE GPIO_PinSource5
#define EEPROM_I2C_SDA_AF GPIO_AF_I2C2
/*等待超时时间*/
#define I2CT_FLAG_TIMEOUT ((uint32_t)0x1000)
#define I2CT_LONG_TIMEOUT ((uint32_t)(10 * I2CT_FLAG_TIMEOUT))
/*
* AT24C02 2kb = 256 B , 1个块 32 页, 8 字节/页,Block0
* AT24C04 4kb = 512 B , 2个块2*32 页,16 字节/页,Block0~1
* AT24C08 8kb = 1K B , 4个块4*32 页,16 字节/页,Block0~3
* AT24C16 16kb = 2K B , 8个块8*32 页,16 字节/页,Block0~7
*
* Device Address
* 1 0 1 0 A2 A1 A0 R/W
* 1 0 1 0 0 0 0 0 = 0XA0
* 1 0 1 0 0 0 0 1 = 0XA1
*/
/* EEPROM Addresses defines */
#define EEPROM_Block0_ADDRESS 0xA0 /* 块0 AT24C02 AT24C04 AT24C08 AT24C16*/
#define EEPROM_Block1_ADDRESS 0xA2 /*块1 AT24C04 AT24C08 AT24C16*/
#define EEPROM_Block2_ADDRESS 0xA4 /*块2 AT24C08 AT24C16*/
#define EEPROM_Block3_ADDRESS 0xA6 /*块3 AT24C08 AT24C16*/
#define EEPROM_Block4_ADDRESS 0xA8 /* 块4 AT24C16*/
#define EEPROM_Block5_ADDRESS 0xAA /*块5 AT24C16*/
#define EEPROM_Block6_ADDRESS 0xAC /*块6 AT24C16*/
#define EEPROM_Block7_ADDRESS 0xAE /*块7 AT24C16*/
void I2C_Config(void);
void I2C_Buffer_Write(u8* pBuffer, u8 WriteAddr, u16 NumByteToWrite);
uint32_t I2C_Byte_Write(u8* pBuffer, u8 WriteAddr);
uint32_t I2C_Page_Write(u8* pBuffer, u8 WriteAddr, u8 NumByteToWrite);
uint32_t I2C_Buffer_Read(u8* pBuffer, u8 ReadAddr, u16 NumByteToRead);
void I2C_WaitEepromStandbyState(void);
#endif /* __I2C_EE_H */