DETR纯代码分享(八)position_encoding.py(models)
一、导入一些Python库和模块
import math
import torch
from torch import nn
from util.misc import NestedTensor上面的代码段主要是Python代码,用于导入一些Python库和模块,以下是对每行代码的详细解释:
-
import math: 这一行代码导入了Python的math模块,该模块提供了各种数学函数和常数,例如三角函数(sin、cos、tan)、对数函数(log、log10)以及数学常数如圆周率(math.pi)。您可以使用这些函数和常数来进行各种数学计算。 -
import torch: 这一行代码导入了PyTorch库,PyTorch是一种流行的深度学习框架。PyTorch通常用于开发神经网络和进行机器学习研究。它提供了创建和训练神经网络、处理张量(多维数组)等功能。 -
from torch import nn: 这一行代码从PyTorch中导入了nn模块。nn模块提供了各种神经网络层和操作,用于构建神经网络架构。例如,您可以使用nn.Linear创建一个全连接层,nn.Conv2d创建一个卷积层,以及nn.ReLU来应用修正线性单元(ReLU)激活函数。 -
from util.misc import NestedTensor: 这一行代码从自定义模块util.misc中导入了NestedTensor类。NestedTensor不是标准的PyTorch类,它的功能取决于在util.misc模块中如何定义。
二、 PositionEmbeddingSine 类
class PositionEmbeddingSine(nn.Module):
"""
This is a more standard version of the position embedding, very similar to the one
used by the Attention is all you need paper, generalized to work on images.
"""
def __init__(self, num_pos_feats=64, temperature=10000, normalize=False, scale=None):
super().__init__()
self.num_pos_feats = num_pos_feats
self.temperature = temperature
self.normalize = normalize
if scale is not None and normalize is False:
raise ValueError("normalize should be True if scale is passed")
if scale is None:
scale = 2 * math.pi
self.scale = scale
def forward(self, tensor_list: NestedTensor):
x = tensor_list.tensors
mask = tensor_list.mask
assert mask is not None
not_mask = ~mask
y_embed = not_mask.cumsum(1, dtype=torch.float32)
x_embed = not_mask.cumsum(2, dtype=torch.float32)
if self.normalize:
eps = 1e-6
y_embed = y_embed / (y_embed[:, -1:, :] + eps) * self.scale
x_embed = x_embed / (x_embed[:, :, -1:] + eps) * self.scale
dim_t = torch.arange(self.num_pos_feats, dtype=torch.float32, device=x.device)
dim_t = self.temperature ** (2 * (dim_t // 2) / self.num_pos_feats)
pos_x = x_embed[:, :, :, None] / dim_t
pos_y = y_embed[:, :, :, None] / dim_t
pos_x = torch.stack((pos_x[:, :, :, 0::2].sin(), pos_x[:, :, :, 1::2].cos()), dim=4).flatten(3)
pos_y = torch.stack((pos_y[:, :, :, 0::2].sin(), pos_y[:, :, :, 1::2].cos()), dim=4).flatten(3)
pos = torch.cat((pos_y, pos_x), dim=3).permute(0, 3, 1, 2)
return pos这段代码定义了一个名为 PositionEmbeddingSine 的PyTorch模块,用于计算位置嵌入(Position Embedding)。位置嵌入通常用于将位置信息引入神经网络模型中,特别是在处理序列数据或图像数据时。
1、初始化__init__()
class PositionEmbeddingSine(nn.Module):
"""
This is a more standard version of the position embedding, very similar to the one
used by the Attention is all you need paper, generalized to work on images.
"""
def __init__(self, num_pos_feats=64, temperature=10000, normalize=False, scale=None):
super().__init__()
self.num_pos_feats = num_pos_feats #位置特征的数量
self.temperature = temperature #温度参数,控制嵌入的缩放
self.normalize = normalize #是否进行位置嵌入的归一化
if scale is not None and normalize is False:
raise ValueError("normalize should be True if scale is passed")
if scale is None:
scale = 2 * math.pi #默认的嵌入缩放尺度
self.scale = scale这个构造函数的主要目的是为 PositionEmbeddingSine 类的实例设置初始属性值。
-
num_pos_feats: 这是一个整数,默认为64,表示要生成的位置特征的数量。位置特征是用来表示输入数据中的位置信息的向量。 -
temperature: 这是一个浮点数,默认为10000,用于控制位置嵌入的缩放。较高的温度值会导致更大的嵌入值,而较低的温度值会导致更小的嵌入值。 -
normalize: 这是一个布尔值,默认为False。如果设置为True,位置嵌入将被归一化,以确保它们在一定范围内,通常是[0, 2π]。如果设置为False,则不进行归一化。 -
scale: 这是一个浮点数,默认为None。如果未提供scale参数,它将被设置为2π。scale用于控制位置嵌入的缩放范围。如果normalize为True,那么scale将用于归一化位置嵌入的范围。
最后,如果用户提供了scale参数但未将normalize设置为True,代码会引发ValueError,以防止不一致的参数设置。
2、前向传播方法forward()
def forward(self, tensor_list: NestedTensor):
x = tensor_list.tensors #输入张量
mask = tensor_list.mask #掩码,用于指示输入张量中哪些位置是有效的
assert mask is not None
not_mask = ~mask #掩码取反,用于标记哪些位置是无效的
#计算行方向和列方向上的累计位置信息
y_embed = not_mask.cumsum(1, dtype=torch.float32)
x_embed = not_mask.cumsum(2, dtype=torch.float32)
#如果设置了归一化标志,对位置信息进行归一化处理
if self.normalize:
eps = 1e-6
y_embed = y_embed / (y_embed[:, -1:, :] + eps) * self.scale
x_embed = x_embed / (x_embed[:, :, -1:] + eps) * self.scale
#计算位置嵌入
dim_t = torch.arange(self.num_pos_feats, dtype=torch.float32, device=x.device)
dim_t = self.temperature ** (2 * (dim_t // 2) / self.num_pos_feats)
pos_x = x_embed[:, :, :, None] / dim_t
pos_y = y_embed[:, :, :, None] / dim_t
#使用正弦和余弦函数来计算位置嵌入的x分量和y分量
pos_x = torch.stack((pos_x[:, :, :, 0::2].sin(), pos_x[:, :, :, 1::2].cos()), dim=4).flatten(3)
pos_y = torch.stack((pos_y[:, :, :, 0::2].sin(), pos_y[:, :, :, 1::2].cos()), dim=4).flatten(3)
#拼接位置嵌入的x分量和y分量,并将通道维度移动到正确的位置
pos = torch.cat((pos_y, pos_x), dim=3).permute(0, 3, 1, 2)
return pos这个前向传播方法接受一个名为 tensor_list 的输入参数,其中包含了输入张量 x 和掩码 mask。
(1)计算掩码mask
def forward(self, tensor_list: NestedTensor):
x = tensor_list.tensors # 输入张量
mask = tensor_list.mask # 掩码,用于指示输入张量中哪些位置是有效的
assert mask is not None
not_mask = ~mask # 掩码取反,用于标记哪些位置是无效的-
x = tensor_list.tensors: 获取输入参数tensor_list中的张量数据,通常是图像数据。 -
mask = tensor_list.mask: 获取tensor_list中的掩码信息,掩码指示了哪些位置是有效的(True)和哪些位置是无效的(False)。 -
assert mask is not None: 确保掩码信息存在。mask是必需的,因为它用于确定哪些位置需要计算位置嵌入。 -
not_mask = ~mask: 使用~操作符对掩码取反,创建一个not_mask,用于标记哪些位置是无效的。在not_mask中,True 表示无效的位置,False 表示有效的位置。
(2)计算行方向/列方向上的累计位置信息
y_embed = not_mask.cumsum(1, dtype=torch.float32)
x_embed = not_mask.cumsum(2, dtype=torch.float32)-
y_embed = not_mask.cumsum(1, dtype=torch.float32): 计算行方向上的累积位置信息y_embed。这是通过对not_mask在维度1上进行累积操作实现的,数据类型为torch.float32 -
x_embed = not_mask.cumsum(2, dtype=torch.float32): 计算列方向上的累积位置信息x_embed。这是通过对not_mask在维度2上进行累积操作实现的,数据类型为torch.float32。
示例:用来计算列方向上的累积位置信息 x_embed,并且使用 dtype=torch.float32 指定数据类型为 32 位浮点数。让我们通过一个简单的例子来说明它的实现。假设我们有一个输入张量 x,它是一个3x4的二维张量,同时有一个掩码 mask 用来指示哪些位置是有效的(True)和哪些位置是无效的(False):
import torch
x = torch.tensor([[1, 2, 3, 4],
[5, 6, 7, 8],
[9, 10, 11, 12]], dtype=torch.float32)mask = torch.tensor([[True, True, False, True],
[False, True, True, False],
[True, False, True, True]], dtype=torch.bool)
现在,我们来解释如何使用 not_mask.cumsum(2, dtype=torch.float32) 来计算列方向上的累积位置信息:
not_mask是mask的取反,即标记了哪些位置是无效的(False)。not_mask现在如下所示:
not_mask = torch.tensor([[False, False, True, False],
[ True, False, False, True],
[False, True, False, False]], dtype=torch.bool)
-
cumsum(2)表示在维度2上进行累积操作。维度2是列的维度,所以我们将在每一列上执行累积操作。cumsum是累积求和的函数。当你在一个张量上应用cumsum时,它会计算该张量中每个元素在指定维度上的累积和。在这个情况下,指定的维度是维度2,也就是列方向。 -
cumsum操作会计算每个位置的累积和,从左到右依次累积。得到的x_embed张量如下所示:
x_embed = torch.tensor( [ 0., 0., 1., 0.],
[ 1., 0., 1., 1.],
[ 1., 1., 1., 1.], dtype=torch.float32)
在这个示例中,x_embed 是一个与输入张量 x 相同大小的张量,其中每个位置的值表示从该位置的列开始的累积和。
(3)归一化
if self.normalize:
eps = 1e-6
y_embed = y_embed / (y_embed[:, -1:, :] + eps) * self.scale
x_embed = x_embed / (x_embed[:, :, -1:] + eps) * self.scale-
eps = 1e-6: 这一行定义了一个小的正数eps,它是一个极小的值,通常用于数值稳定性。在计算中,它将被添加到分母中,以防止除以零的情况。 -
y_embed = y_embed / (y_embed[:, -1:, :] + eps) * self.scale: 这一行对行方向上的累积位置信息y_embed进行归一化操作。具体步骤如下:y_embed[:, -1:, :]选择每个批次中的最后一行的累积位置信息。结果形状为(batch_size, 1, num_columns)。(y_embed[:, -1:, :] + eps)在分母中将最后一行的累积位置信息与小的正数eps相加,以防止零除法。y_embed / (y_embed[:, -1:, :] + eps)执行元素级除法,将每个位置的值除以最后一行的值(加上eps)进行归一化。* self.scale乘以缩放因子self.scale,以将归一化后的位置信息缩放到所需的范围。
-
x_embed = x_embed / (x_embed[:, :, -1:] + eps) * self.scale: 这一行对列方向上的累积位置信息x_embed进行类似的归一化操作,步骤与上述操作相似:x_embed[:, :, -1:]选择每个批次中的最后一列的累积位置信息。结果形状为(batch_size, num_rows, 1)。(x_embed[:, :, -1:] + eps)在分母中将最后一列的累积位置信息与小的正数eps相加,以防止零除法。x_embed / (x_embed[:, :, -1:] + eps)执行元素级除法,将每个位置的值除以最后一列的值(加上eps)进行归一化。* self.scale乘以缩放因子self.scale,以将归一化后的位置信息缩放到所需的范围。
这个归一化操作的目的是确保位置信息的范围适应模型的需求,以便模型能够更好地理解不同位置的输入数据。归一化有助于确保不同位置的位置嵌入在相似的尺度上,并提高模型的性能和泛化能力。
(4)计算位置嵌入

#计算位置嵌入
dim_t = torch.arange(self.num_pos_feats, dtype=torch.float32, device=x.device)
dim_t = self.temperature ** (2 * (dim_t // 2) / self.num_pos_feats)
pos_x = x_embed[:, :, :, None] / dim_t
pos_y = y_embed[:, :, :, None] / dim_t-
dim_t = torch.arange(self.num_pos_feats, dtype=torch.float32, device=x.device): 这一行创建一个名为dim_t的张量,用于表示位置嵌入的维度。具体解释如下:-
self.num_pos_feats: 这是一个类的属性,它指定了要使用的位置嵌入的维度数。在这里,它代表位置编码的特征维度数。例如,如果self.num_pos_feats设置为 64,则将生成一个包含 64 个不同特征的位置编码。 -
torch.arange(self.num_pos_feats, dtype=torch.float32, device=x.device): 这一部分使用 PyTorch 的torch.arange函数创建了一个张量,它包含从 0 到self.num_pos_feats - 1的一系列数字。这些数字将用作位置编码的特征索引。 -
dtype=torch.float32, device=x.device: 通过指定数据类型为torch.float32和设备为x.device,确保dim_t张量的数据类型与输入张量x的数据类型和设备一致。
-
-
dim_t = self.temperature ** (2 * (dim_t // 2) / self.num_pos_feats): 这一行计算了用于位置嵌入的温度参数dim_t,具体步骤如下:-
2 * (dim_t // 2): 这一部分首先将dim_t中的每个元素除以 2,然后乘以 2。这样做的目的是将dim_t中的所有奇数索引位置的元素都设置为零,而偶数索引位置的元素保持不变。这是因为位置编码通常采用正弦和余弦函数来构建,其中奇数索引位置的元素对应于正弦函数,而偶数索引位置的元素对应于余弦函数。 -
(2 * (dim_t // 2) / self.num_pos_feats): 接着,将上一步计算的结果除以self.num_pos_feats。这一步将确保温度参数dim_t在不同的位置嵌入特征之间共享,并且其值在一个合适的范围内,以适应模型的需求。
-
-
pos_x = x_embed[:, :, :, None] / dim_t: 这一行计算位置嵌入的 x 分量。具体步骤如下:-
x_embed: 这是之前计算的列方向上的累积位置信息,它的形状为(batch_size, num_rows, num_columns)。 -
x_embed[:, :, :, None]: 通过添加一个额外的维度None,将x_embed的形状从(batch_size, num_rows, num_columns)扩展为(batch_size, num_rows, num_columns, 1)。这是为了在接下来的操作中可以对x_embed的每个位置进行元素级别的除法。 -
/ dim_t: 执行元素级别的除法操作,将x_embed的每个位置的值除以对应位置的dim_t值。这将对位置信息进行缩放,以适应模型的需求。这将对两个张量进行广播操作,使dim_t在最后一个维度上被复制以匹配x_embed的形状。因此,pos_x的形状将与x_embed保持一致,即(batch_size, num_rows, num_columns, num_pos_feats)。
-
-
pos_y = y_embed[:, :, :, None] / dim_t: 这一行计算位置嵌入的 y 分量,步骤与计算pos_x相似,只是使用了行方向上的累积位置信息y_embed。
总之,这两行代码将原始的位置信息 x_embed 和 y_embed 进行了归一化和缩放,得到了位置嵌入的 x 和 y 分量。这些位置嵌入将被用于表示输入数据的位置信息,并与输入数据相结合,以帮助模型更好地理解不同位置的输入信息。
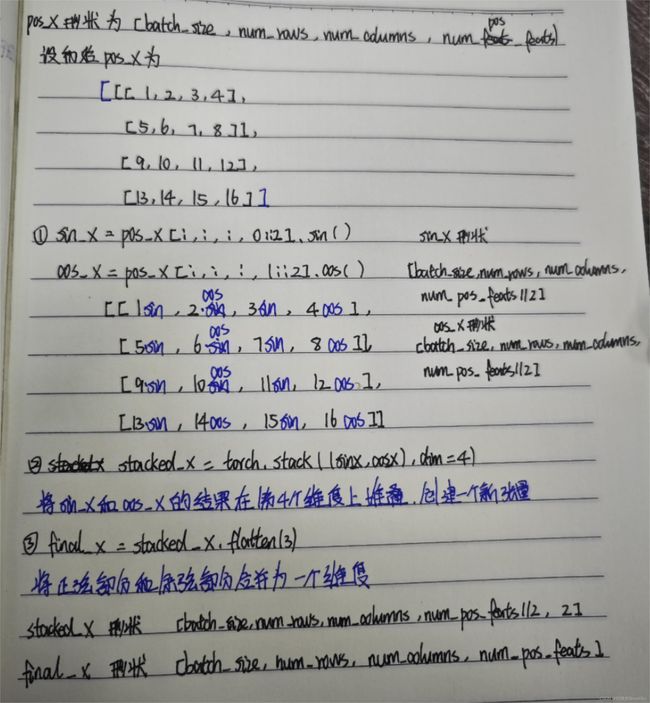
(5)将位置嵌入的 x 和 y 分量进行正弦和余弦变换
#使用正弦和余弦函数来计算位置嵌入的x分量和y分量
pos_x = torch.stack((pos_x[:, :, :, 0::2].sin(), pos_x[:, :, :, 1::2].cos()), dim=4).flatten(3)
pos_y = torch.stack((pos_y[:, :, :, 0::2].sin(), pos_y[:, :, :, 1::2].cos()), dim=4).flatten(3)这两行代码的目的是将位置嵌入的 x 和 y 分量进行正弦和余弦变换,并将它们合并成一个更高维度的位置嵌入。现在逐行解释:
-
pos_x[:, :, :, 0::2]: 这一部分使用切片操作0::2选择pos_x张量的第 0、2、4、6、... 等位置的元素。这些元素对应于位置嵌入的 x 分量的正弦部分。 -
pos_x[:, :, :, 1::2]: 同样,这一部分使用切片操作1::2选择pos_x张量的第 1、3、5、7、... 等位置的元素。这些元素对应于位置嵌入的 x 分量的余弦部分。 -
.sin(): 对于选定的元素,应用正弦函数,将正弦变换应用于 x 分量的部分,得到一个新的张量。 -
.cos(): 对于另一组选定的元素,应用余弦函数,将余弦变换应用于 x 分量的部分,得到另一个新的张量。 -
torch.stack(...): 这一部分将正弦和余弦变换的结果在一个新的维度(维度 4)上堆叠在一起,创建一个新的张量。具体来说,它将正弦和余弦部分按维度 4 进行堆叠,以便后续的处理。 -
.flatten(3): 最后,这一部分将张量在维度 3 上展平,将正弦和余弦部分合并为一个维度,得到最终的位置嵌入。
这个过程实际上是将位置嵌入的 x 和 y 分量变换为正交的正弦和余弦分量,以更好地表示位置信息。这种正弦和余弦变换常用于位置编码,有助于模型更好地捕捉序列数据中的位置关系。同样的操作也适用于 pos_y,用于计算位置嵌入的 y 分量。
(6)最终位置嵌入
#拼接位置嵌入的x分量和y分量,并将通道维度移动到正确的位置
pos = torch.cat((pos_y, pos_x), dim=3).permute(0, 3, 1, 2)
return pos这段代码的目的是将位置嵌入的 x 分量和 y 分量拼接在一起,并重新排列维度,以获得最终的位置嵌入。让我们逐行解释:
-
torch.cat((pos_y, pos_x), dim=3): 这一部分使用torch.cat函数将pos_y和pos_x张量在维度 3 上进行拼接。因为在前面的步骤中,pos_y和pos_x表示了位置嵌入的 y 分量和 x 分量,它们的形状都是(batch_size, num_rows, num_columns, num_pos_feats),所以在维度 3 上拼接将它们合并成一个形状为(batch_size, num_rows, num_columns, num_pos_feats*2)的张量。 -
permute(0, 3, 1, 2): 接着,使用.permute函数重新排列维度,将维度 0(批大小)、3(通道维度)、1(行数)和2(列数)重新排列,以获得最终的位置嵌入。这个操作确保位置嵌入的维度排列与模型的期望输入一致。
最终,pos 张量将包含位置嵌入的所有信息,其形状为 (batch_size, num_pos_feats*2, num_rows, num_columns),其中 num_pos_feats 是位置编码的特征维度数,而 num_rows 和 num_columns 分别是输入数据的行数和列数。这个位置嵌入张量可以与输入数据相结合,以帮助模型更好地理解输入数据中的位置关系。
(自己理解)这里图片的feature维度为256,pos 张量的维度为128(因为分了x和y方向)
三、PositionEmbeddingLearned类
class PositionEmbeddingLearned(nn.Module):
"""
Absolute pos embedding, learned.
"""
def __init__(self, num_pos_feats=256):
super().__init__()
self.row_embed = nn.Embedding(50, num_pos_feats)
self.col_embed = nn.Embedding(50, num_pos_feats)
self.reset_parameters()
def reset_parameters(self):
nn.init.uniform_(self.row_embed.weight)
nn.init.uniform_(self.col_embed.weight)
def forward(self, tensor_list: NestedTensor):
x = tensor_list.tensors
h, w = x.shape[-2:]
i = torch.arange(w, device=x.device)
j = torch.arange(h, device=x.device)
x_emb = self.col_embed(i)
y_emb = self.row_embed(j)
pos = torch.cat([
x_emb.unsqueeze(0).repeat(h, 1, 1),
y_emb.unsqueeze(1).repeat(1, w, 1),
], dim=-1).permute(2, 0, 1).unsqueeze(0).repeat(x.shape[0], 1, 1, 1)
return pos这段代码实现了一个名为 PositionEmbeddingLearned 的类,用于生成学习到的绝对位置嵌入。PositionEmbeddingLearned 类提供了一种通过学习得到的绝对位置嵌入的方式,这些嵌入可以与输入数据结合使用,以帮助模型理解输入数据中的位置信息。
1、创建位置嵌入__init__()
class PositionEmbeddingLearned(nn.Module):
"""
Absolute pos embedding, learned.
"""
def __init__(self, num_pos_feats=256):
super().__init__()
self.row_embed = nn.Embedding(50, num_pos_feats)
self.col_embed = nn.Embedding(50, num_pos_feats)
self.reset_parameters()这段代码实现了 PositionEmbeddingLearned 类的构造函数,用于初始化位置嵌入模块。让我们逐行详细解释代码的实现:
-
def __init__(self, num_pos_feats=256):- 这是构造函数的定义,它接受一个可选参数
num_pos_feats,用于指定位置嵌入的特征维度数,默认为 256。
- 这是构造函数的定义,它接受一个可选参数
-
super().__init__()- 调用了父类
nn.Module的构造函数,确保正确初始化了PositionEmbeddingLearned类。
- 调用了父类
-
self.row_embed = nn.Embedding(50, num_pos_feats)- 创建了一个名为
row_embed的属性,它是一个 Embedding 层(嵌入层)。 nn.Embedding(50, num_pos_feats)创建了一个 Embedding 层,该层将 50 个离散的整数作为输入,并将它们映射到一个具有num_pos_feats个特征维度的连续空间中。这个层将用于表示行的位置嵌入。
- 创建了一个名为
-
self.col_embed = nn.Embedding(50, num_pos_feats)- 创建了一个名为
col_embed的属性,它也是一个 Embedding 层,与row_embed类似,但用于表示列的位置嵌入。
- 创建了一个名为
-
self.reset_parameters()- 调用了
reset_parameters方法,用于初始化 Embedding 层的权重。
- 调用了
总结: 这段代码的主要功能是创建 PositionEmbeddingLearned 类的实例,并初始化两个 Embedding 层 (row_embed 和 col_embed) 用于表示行和列的位置嵌入。这些位置嵌入的特征维度数由构造函数的参数 num_pos_feats 控制,默认为 256。这些 Embedding 层将在后续的 forward 方法中用于获取位置嵌入的值。
2、reset_parameters()
def reset_parameters(self):
nn.init.uniform_(self.row_embed.weight)
nn.init.uniform_(self.col_embed.weight)这段代码实现了 PositionEmbeddingLearned 类中的 reset_parameters 方法,该方法用于初始化 Embedding 层的权重。让我们逐行详细解释代码的实现:
-
def reset_parameters(self):- 这是
reset_parameters方法的定义,它属于PositionEmbeddingLearned类。
- 这是
-
nn.init.uniform_(self.row_embed.weight)- 这一行代码使用 PyTorch 的
nn.init模块中的uniform_函数来初始化row_embedEmbedding 层的权重。 self.row_embed.weight是一个张量,表示row_embed层的权重矩阵。uniform_函数会将这个权重矩阵的值初始化为均匀分布中的随机值。- 这样,每个行位置嵌入的权重都会以随机的初始值开始,模型在训练过程中会学习到适合任务的最佳权重值。
- 这一行代码使用 PyTorch 的
-
nn.init.uniform_(self.col_embed.weight)- 这一行代码与上面的行类似,但是针对的是
col_embedEmbedding 层的权重矩阵。 self.col_embed.weight是表示col_embed层的权重矩阵的张量,它也会被初始化为均匀分布中的随机值。
- 这一行代码与上面的行类似,但是针对的是
总结: reset_parameters 方法的作用是在创建 PositionEmbeddingLearned 类的对象时初始化 row_embed 和 col_embed Embedding 层的权重,以确保它们有合适的初始值,模型可以在训练过程中逐渐调整这些权重以适应特定任务。这种初始化策略有助于模型的收敛和性能提升。
3、forward()
def forward(self, tensor_list: NestedTensor):
x = tensor_list.tensors
h, w = x.shape[-2:]
i = torch.arange(w, device=x.device)
j = torch.arange(h, device=x.device)
x_emb = self.col_embed(i)
y_emb = self.row_embed(j)
pos = torch.cat([
x_emb.unsqueeze(0).repeat(h, 1, 1),
y_emb.unsqueeze(1).repeat(1, w, 1),
], dim=-1).permute(2, 0, 1).unsqueeze(0).repeat(x.shape[0], 1, 1, 1)
return pos这段代码实现了 PositionEmbeddingLearned 类的 forward 方法,该方法用于计算学习到的绝对位置嵌入。
-
x = tensor_list.tensors:- 获取输入
tensor_list中的张量x,这是要为其计算绝对位置嵌入的输入张量。形状为[batch_size,num_channels,height,width]
- 获取输入
-
h, w = x.shape[-2:]:- 获取输入张量
x的高度和宽度,其中x.shape[-2:]表示取张量的倒数第二和倒数第一维度的尺寸。
- 获取输入张量
-
i = torch.arange(w, device=x.device)和j = torch.arange(h, device=x.device):- 创建列索引
i和行索引j,它们分别包含了从 0 到w-1和从 0 到h-1的整数值。这些索引用于获取列和行的位置嵌入。
- 创建列索引
-
x_emb = self.col_embed(i)和y_emb = self.row_embed(j):- 使用 Embedding 层
self.col_embed和self.row_embed分别获取列和行的位置嵌入x_emb和y_emb。这些位置嵌入是模型学习到的表示。[w,num_pos_feats]和[h,num_pos_feats ] unsqueeze(0)操作在维度 0 上添加一个维度,将x_emb的形状从(w, num_pos_feats)变为(1, w, num_pos_feats)。- x_emb.unsqueeze(0).repeat(h, 1, 1),它的形状是
(h, w, num_pos_feats)。 unsqueeze(1)操作在维度 1 上添加一个维度,将 y_emb的形状从(h, num_pos_feats)变为(h, 1, num_pos_feats)。- y_emb.unsqueeze(1).repeat(1, w, 1),
repeat(1, w, 1)操作会沿着维度 1 复制 y_emb,重复w次。因此,形状将变为(h, w, num_pos_feats),其中每个列都是相同的。
torch.cat([...], dim=-1):- torch.cat([ x_emb.unsqueeze(0).repeat(h, 1, 1), y_emb.unsqueeze(1).repeat(1, w, 1), ], dim=-1), 形状为,
(h, w, num_pos_feats * 2) - torch.cat([ x_emb.unsqueeze(0).repeat(h, 1, 1), y_emb.unsqueeze(1).repeat(1, w, 1), ], dim=-1).permute(2, 0, 1),形状为
(num_pos_feats*2,h, w) - torch.cat([ x_emb.unsqueeze(0).repeat(h, 1, 1), y_emb.unsqueeze(1).repeat(1, w, 1), ], dim=-1).permute(2, 0, 1).unsqueeze(0),形状为
(1,num_pos_feats*2,h, w) x.shape[0]是batch_size- torch.cat([ x_emb.unsqueeze(0).repeat(h, 1, 1), y_emb.unsqueeze(1).repeat(1, w, 1), ], dim=-1).permute(2, 0, 1).unsqueeze(0).repeat(x.shape[0], 1, 1, 1),使用
.repeat函数将位置嵌入复制多次,以匹配输入张量x的批大小。形状为(batch_size,num_pos_feats*2,h, w)
- 使用 Embedding 层
-
最后,返回计算得到的绝对位置嵌入张量
pos,它包含了输入张量x中每个位置的位置编码信息。
总结: forward 方法的主要任务是根据输入张量的高度和宽度,以及通过 Embedding 学习到的位置嵌入,计算并返回绝对位置嵌入。这些位置嵌入可以与输入数据结合使用,以帮助模型理解输入数据中的位置信息。
(自己理解)这里图片的feature维度为256,pos 张量的维度为256
四、build_position_encoding()函数
def build_position_encoding(args):
N_steps = args.hidden_dim // 2 #N_steps = 128,输入是256维的向量
#本文中分为了x方向上的编码和y方向上的编码(区分图像和词),前128维代表x方向的位置编码,后128维代表y方向的位置编码
if args.position_embedding in ('v2', 'sine'):
# TODO find a better way of exposing other arguments
position_embedding = PositionEmbeddingSine(N_steps, normalize=True)
elif args.position_embedding in ('v3', 'learned'):
position_embedding = PositionEmbeddingLearned(N_steps)
else:
raise ValueError(f"not supported {args.position_embedding}")
return position_embedding这段代码是用于构建位置编码(Position Encoding)的函数 build_position_encoding,根据输入的参数 args 中的配置选择不同的位置编码方式。让我们逐步解释代码的实现:
-
N_steps = args.hidden_dim // 2:N_steps是一个整数,表示位置编码的步数。它的值被设置为args.hidden_dim的一半,其中args.hidden_dim表示输入向量的维度,假设它为 256,因此N_steps将等于 128。
-
if args.position_embedding in ('v2', 'sine')::- 这个条件语句检查
args.position_embedding的值是否为'v2'或'sine'。 - 如果条件成立,表示要使用正弦位置编码方式。
- 这个条件语句检查
-
position_embedding = PositionEmbeddingSine(N_steps, normalize=True):- 如果选择使用正弦位置编码,那么会创建一个
PositionEmbeddingSine类的实例,并传递N_steps(128)作为位置编码的特征数。 normalize=True表示要对位置编码进行归一化处理。这将在位置编码中应用归一化。
- 如果选择使用正弦位置编码,那么会创建一个
-
elif args.position_embedding in ('v3', 'learned')::- 如果条件不成立,即
args.position_embedding的值为'v3'或'learned',表示要使用学习到的位置编码方式。
- 如果条件不成立,即
-
position_embedding = PositionEmbeddingLearned(N_steps):- 如果选择使用学习到的位置编码,那么会创建一个
PositionEmbeddingLearned类的实例,并传递N_steps(128)作为位置编码的特征数。
- 如果选择使用学习到的位置编码,那么会创建一个
-
else:- 如果
args.position_embedding的值既不是'v2'也不是'v3',则会引发一个值错误(ValueError),表示不支持该位置编码方式。
- 如果
-
最后,函数返回选定的位置编码器
position_embedding,它可以根据输入数据计算位置编码,用于模型中。
总结: 该函数根据输入参数 args 中的配置选择位置编码方式,可以是正弦位置编码或学习到的位置编码,并返回相应的位置编码器实例。位置编码用于将位置信息引入模型,以帮助模型理解输入数据的空间结构。选择合适的位置编码方式取决于具体的应用需求。