OpenCV 基础图像处理
1、生成图像
cv2.imread是OpenCV库中的一个函数,用于读取图像文件。它接受一个参数,即要读取的图像文件的路径,返回一个多维数组,
表示图像的像素值。该函数的常用参数包括:
'flags':指定读取图像的方式,包括cv2.IMREAD_COLOR(读取彩色图像),cv2.IMREAD_GRAYSCALE(读取灰度图像)等。
'encoding':指定图像的编码方式,默认为None。
'decoder':指定解码器,默认为None。
import cv2
image = cv2.imread('images/lena.png')
# imread函数读取了图像文件,并将其数据存储在变量'image'中
print(image)
# 打印的结果是一个多维数组,表示图像的像素值
2、显示图像
cv2.waitKey()是OpenCV库中的一个函数,用于等待用户按键。 它接受一个参数,表示等待的时间(以毫秒为单位),如果没有按键按下,则返回-1。 如果参数为0,则无限期等待用户按键。
import cv2
image = cv2.imread('images/lena.png')
# 读取图像文件,并将其数据存储在变量'image'中
cv2.imshow('lena', image)
# 创建一个名为'lena'的窗口,并在该窗口中显示我们刚刚读取的图像
cv2.waitKey(0)
# 无限期地等待用户按键。参数0表示无限期等待。
cv2.destroyWindow('lena')
# 关闭名为'lena'的窗口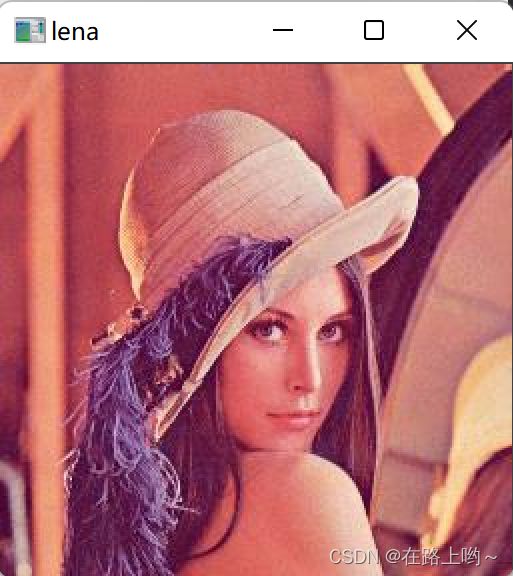
3、保存图像
cv2.imwrite(filename, img[, params])
filename:要写入的文件名,包括文件路径和文件扩展名。
img:要写入的图像数据,可以是单通道灰度图像,也可以是三通道彩色图像。
params:可选参数,包括一些写入图像的质量、压缩比等参数,如[int(IMWRITE_JPEG_QUALITY), int(IMWRITE_PNG_COMPRESSION)]。
import cv2
# 读取图像
img = cv2.imread('images/lena.png')
# 写入图像
# 将变量'img'中的图像数据写入到名为'result.bmp'的文件中
result = cv2.imwrite('result.bmp', img)
4、读取视频
cv2.VideoCapture是OpenCV库中的一个函数,用于读取视频文件或摄像头的视频流。 它的主要作用是从本地或网络中读取视频帧,并将其预存储到内存中,以便进行后续的图片处理或特征提取等操作。
import cv2
video = cv2.VideoCapture('images/video.mp4')
# 创建VideoCapture对象 这个对象可以读取视频文件,这里读取的是位于'images/video.mp4'路径的视频文件
fps = video.get(cv2.CAP_PROP_FPS)
# 读取视频的帧速率 帧率是指每秒显示的帧数
height = video.get(cv2.CAP_PROP_FRAME_HEIGHT)
# 获取视频的高度
weight = video.get(cv2.CAP_PROP_FRAME_WIDTH)
# 获取视频的宽度
print('FPS:', fps)
# 打印视频的帧率
print('The video size: ', height, weight)
# 打印视频的大小,即其帧的高度和宽度FPS: 24.12565445026178
The video size: 860.0 540.0
5、读取并播放视频
import cv2
video = cv2.VideoCapture('images/video.mp4')
# "创建一个VideoCapture对象,用于读取视频文件
while video.isOpened():
# 当视频文件成功打开时,进入循环。
ret, frame = video.read()
# 使用read方法读取视频的一帧,ret为布尔值,表示是否读取成功,frame为读取到的一帧
cv2.imshow('video', frame)
# 使用imshow方法显示视频,窗口的名称为'video',显示的内容为frame
key = cv2.waitKey(30)
# 等待30毫秒,看用户是否有键盘输入
# 按ESC键退出
if key == 27:
break
# 如果用户输入的是ESC键(ASCII值为27),则退出循环
video.release()
# 释放VideoCapture对象
cv2.destroyAllWindows()
# 关闭所有的OpenCV窗口6、查看图像属性
import cv2
imageColor = cv2.imread('images/lena.png')
print('图像的大小和通道数:', imageColor.shape)
# 在OpenCV中,一个彩色图像的形状是(高度, 宽度, 颜色通道),而颜色通道通常为3(RGB)
print('图像总的像素个数:', imageColor.size)
# 可以通过.size属性得到图像的总像素数
print('图像的数据类型:', imageColor.dtype)
# 图像的数据类型通常是'uint8',表示每个像素值的范围是0-255
图像的大小和通道数: (256, 256, 3)
图像总的像素个数: 196608
图像的数据类型: uint8
7、生成灰色图像
生成一个256x256的黑色图像,所有像素的值都被设置为0 np.zeros([256, 256], dtype=np.uint8)
import cv2
gray = np.random.randint(0, 256, size=[256, 256], dtype=np.uint8)
# 使用numpy的random.randint函数创建了一个256x256的二维数组,
# 数组中的每个值都是0到255之间的随机整数,数据类型为无符号8位整数(uint8)。
# 这个数组代表一张灰度图像,其中每个值表示一个像素的灰度值。
cv2.imshow('gray-image', gray)
# 用imshow函数显示上面创建的灰度图像。'gray-image'是窗口的名称,gray是要显示的图像
cv2.waitKey(0)
cv2.destroyAllWindows() 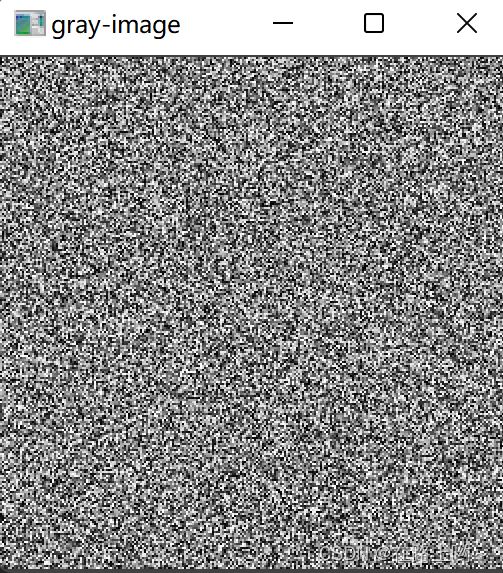
8、转换灰度图像
import cv2
imageColor = cv2.imread('images/lena.png')
# imread函数读取了一个图像文件,文件路径是'images/lena.png',并将其保存到变量imageColor中。
# 这个函数会将图像读取为彩色图像,除非另外指定。
cv2.imshow('color', imageColor)imageGrey = cv2.imread('images/lena.png', 0)
# 0是cv2.IMREAD_GRAYSCALE的别名,表示将图像读取为灰度图像
cv2.imshow('grey', imageGrey)imageGrey2 = cv2.imread('images/lena.png', cv2.IMREAD_REDUCED_GRAYSCALE_2)
# cv2.IMREAD_REDUCED_GRAYSCALE_2表示将图像读取为灰度图像,并将颜色深度降低到2
cv2.imshow('grey2', imageGrey2)img = cv2.imread('images/lena.png', cv2.IMREAD_REDUCED_COLOR_4)
# cv2.IMREAD_REDUCED_COLOR_4表示将图像读取为彩色图像,并将颜色深度降低到4
cv2.imshow('color2', img)cv2.waitKey(0)
cv2.destroyAllWindows()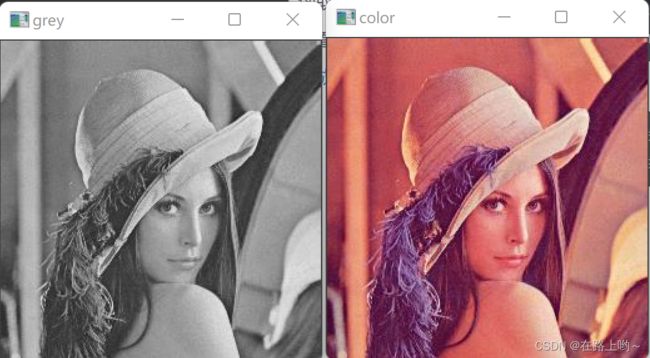
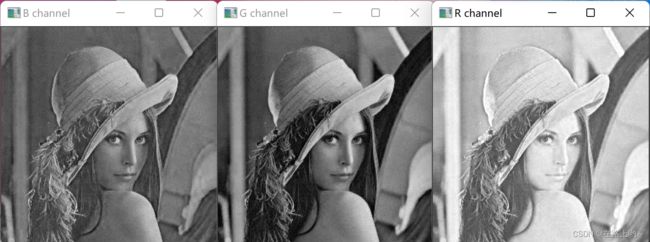
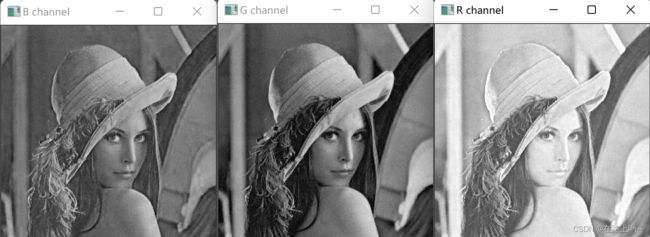
9、通道拆分
"""读取一张图像,并分离出它的红、绿、蓝三个颜色通道"""
import cv2
image = cv2.imread('images/lena.png')
# 将图像的三个颜色通道(蓝、绿、红)分离出来。
# 在OpenCV中,图像的颜色通道顺序是BGR
b = image[:, :, 0]
g = image[:, :, 1]
r = image[:, :, 2]
# 使用imshow函数分别显示蓝、绿、红三个颜色通道。
cv2.imshow('B channel', b)
cv2.imshow('G channel', g)
cv2.imshow('R channel', r)
cv2.waitKey(0)
cv2.destroyAllWindows()
import cv2
image = cv2.imread('images/lena.png')
# 将图像分离成三个颜色通道,分别对应蓝色(B)、绿色(G)和红色(R)
b, g, r = cv2.split(image)
cv2.imshow('B channel', b)
cv2.imshow('G channel', g)
cv2.imshow('R channel', r)
cv2.waitKey(0)
cv2.destroyAllWindows()
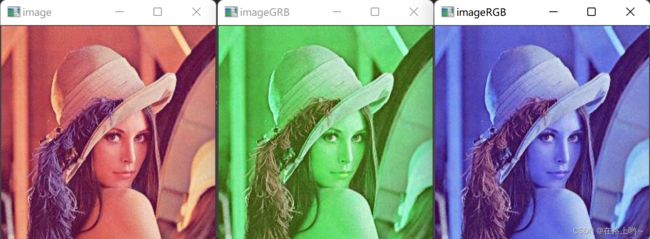
10、通道合并
import cv2
image = cv2.imread('images/lena.png')
b, g, r = cv2.split(image)
# 分割成三个通道,分别是蓝色通道(b)、绿色通道(g)和红色通道(r)
imageRGB = cv2.merge([r, g, b])
# 红色、绿色和蓝色通道按照RGB顺序合并成一个新的图像
imageGRB = cv2.merge([g, r, b])
# 绿色、红色和蓝色通道按照GRB顺序合并成一个新的图像
cv2.imshow('image', image)
# 显示原始图像
cv2.imshow('imageRGB', imageRGB)
# 显示RGB顺序的图像
cv2.imshow('imageGRB', imageGRB)
# 显示GRB顺序的图像
cv2.waitKey(0)
cv2.destroyAllWindows()