数据结构:堆的实现和堆排序及TopK问题
文章目录
- 1. 堆的概念和性质
-
- 1.1 堆的概念
- 1.2 堆的性质
- 1.3 堆的作用
- 2. 堆的声明
- 3. 堆的实现
-
- 3.1 堆的插入
- 3.2 删除堆顶元素
- 3.3 利用数组建堆
- 3.4 完整代码
- 4. 堆的应用
-
- 4.1 堆排序
- 4.2 TopK问题
-
- 代码实现
物理结构有顺序结构存储和链式结构存储两种,二叉树理所应当也是可以顺序结构存储和链式结构存储的.
但是普通的二叉树显然不适合使用数组来存储,因为可能会存在大量的空间浪费,而完全二叉树更加适合用顺序结构存储,因为它中间不会有空的元素,从头到尾一直连续.

有一种数据结构就是将完全二叉树以数组存放的,这就是下面介绍的堆.
1. 堆的概念和性质
1.1 堆的概念
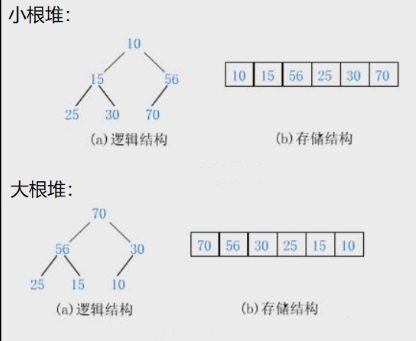
堆(Heap)是计算机科学中一类特殊的数据结构的统称.堆通常是一个可以被看做一棵完全二叉树的数组对象.
如果有一个关键码的集合 K = { k 0 , k 1 , k 2 , . . . , k n − 1 k_0, k_1, k_2, ..., k_{n-1} k0,k1,k2,...,kn−1}, 把它的所有元素按完全二叉树的顺序存储方式存储在一个一维数组中, 并满足: K i < = K 2 ∗ i + 1 且 K i < = K 2 ∗ i + 2 ( i = 0 , 1 , 2... ) , 则称为小堆 K_i<=K_{2*i+1}且K_i<=K_{2*i+2}(i=0,1,2...),则称为小堆 Ki<=K2∗i+1且Ki<=K2∗i+2(i=0,1,2...),则称为小堆
或 K i > = K 2 ∗ i + 1 且 K i > = K 2 ∗ i + 2 ( i = 0 , 1 , 2... ) , 则称为大堆 或K_i>=K_{2*i+1}且K_i>=K_{2*i+2}(i=0,1,2...),则称为大堆 或Ki>=K2∗i+1且Ki>=K2∗i+2(i=0,1,2...),则称为大堆将根节点最大的堆叫做最大堆或大根堆,根节点最小的堆叫做最小堆或小根堆.
总结为
小堆:任意一个父亲都 <= 孩子
大堆:任意一个父亲都 >= 孩子
1.2 堆的性质
- 堆中某个结点的值总是不大于或不小于其父结点的值;
- 堆总是一棵完全二叉树
1.3 堆的作用
- 堆排序:时间复杂度为 O ( N ∗ l o g N ) O(N*logN) O(N∗logN)
- 解决 T o p K TopK TopK问题:在 N N N个数中间找出最大的前 k k k个或者最小的前 k k k个
- 在操作系统中:根据优先级决定若干进程中使用哪个进程
2. 堆的声明
所有的数组都可以被当作完全二叉树,但不是所有的数组都能被称为堆.
本文实现大堆,若想灵活实现大小堆转换,可以使用函数指针
// 堆的结构
typedef struct Heap
{
HPDatatype* a; //堆底层用数组存储
int size; //堆的元素个数
int capacity; //堆的容量
}Heap;
//向上调整
void AdjustUp(HPDatatype* a, int child);
//向下调整
void AdjustDown(HPDatatype* a, int n , int parent);
//交换值
void Swap(HPDatatype* p1, HPDatatype* p2);
//堆初始化
void HeapInit(Heap* hp);
//堆打印
void HeapPrint(Heap* hp);
//堆使用数组初始化
void HeapArrayInit(Heap* hp, HPDatatype* a, int n);
//堆销毁
void HeapDestroy(Heap* hp);
//堆插入
void HeapPush(Heap* hp, HPDatatype x);
//删除堆顶元素
void HeapPop(Heap* hp);
//返回堆顶数据
HPDatatype HeapTop(Heap* hp);
//判断堆是否为空,为空返回非0,非空返回0
int HeapEmpty(Heap* hp);
可以发现,虽然堆的结构和顺序表是一样的,但是它们的逻辑结构是不同的.堆是特殊的完全二叉树,是树形层次结构;顺序表是顺序存储的线性表,是线性存储结构.
3. 堆的实现
关于堆的初始化,打印,销毁等操作,与顺序表基本一致,这里不过多赘述.
最重要的是堆的插入,删除堆顶元素和堆使用数组初始化,需要保持堆序性质,
3.1 堆的插入
先将元素 X X X 插入到数组最后一个位置,随后将它与它的父亲相比较,如果不满足堆序,则交换两值, 直至 X X X 到堆顶或者满足堆序结束判断.
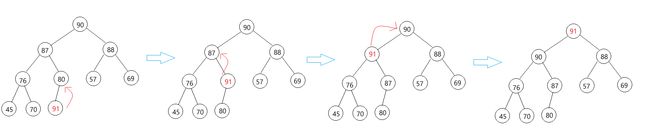
上面的行为可以称之为向上调整(AdjustUp), 具体实现如下
void AdjustUp(HPDatatype* a, int child)
{
int parent = (child - 1) / 2; //计算父亲下标
while (child > 0)
{
//如果不符合堆序,交换两个结点的值
if (a[child] > a[parent])
{
Swap(&a[child], &a[parent]);
child = parent;
parent = (child - 1) / 2;
}
else
{
break;
}
}
}
有了向上调整的函数,堆插入就很容易写出来了
void HeapPush(Heap* hp, HPDatatype x)
{
assert(hp);
//扩容
if (hp->size == hp->capacity)
{
int newCapacity = hp->capacity == 0 ? 4 : 2 * hp->capacity;
HPDatatype* tmp = (HPDatatype*)realloc(hp->a, sizeof(HPDatatype) * newCapacity);
if (tmp != NULL)
{
hp->a = tmp;
hp->capacity = newCapacity;
}
else
{
perror("realloc");
}
}
//先将元素插到数组末尾
hp->a[hp->size] = x;
//向上调整
AdjustUp(hp->a, hp->size);
//修改大小
hp->size++;
}
向上调整逻辑上控制树,物理上控制数组,向上调整只会影响该元素的祖先,不会影响根结点的另外一棵子树.
时间复杂度为 O ( l o g N ) O(logN) O(logN)
3.2 删除堆顶元素
首先交换堆顶和堆底的元素,删除此时位于堆底的元素,随后将此时堆顶的元素和其孩子中的较大(或较小)值比较,如果不满足堆序进行交换,直至满足堆序或者该元素已经没有孩子.

需要注意的是:并不是所有的结点都有两个孩子,所以在寻找结点孩子中的较大(较小)值,需要提前判断是否有右孩子
void AdjustDown(HPDatatype* a, int n, int parent)
{
int child = parent * 2 + 1;
while (child < n)
{
//找到更大的孩子
if (child + 1 < n && a[child + 1] > a[child])
{
child++;
}
//如果孩子比父亲大,交换元素
if (a[child] > a[parent])
{
Swap(&a[child], &a[parent]);
parent = child;
child = parent * 2 + 1;
}
else
{
break;
}
}
}
向下调整有个前提,就是该结点的左右子树都是堆.
时间复杂度也是 O ( l o g N ) O(logN) O(logN),最坏情况是从根节点移动到叶子节点.
void HeapPop(Heap* hp)
{
assert(hp); //确保hp合法
assert(!HeapEmpty(hp)); //确保堆不为空
//交换最后一个元素和首元素
Swap(&hp->a[0], &hp->a[hp->size - 1]);
hp->size--;
//向下调整
AdjustDown(hp->a, hp->size, 0);
}
3.3 利用数组建堆
有两种方法:
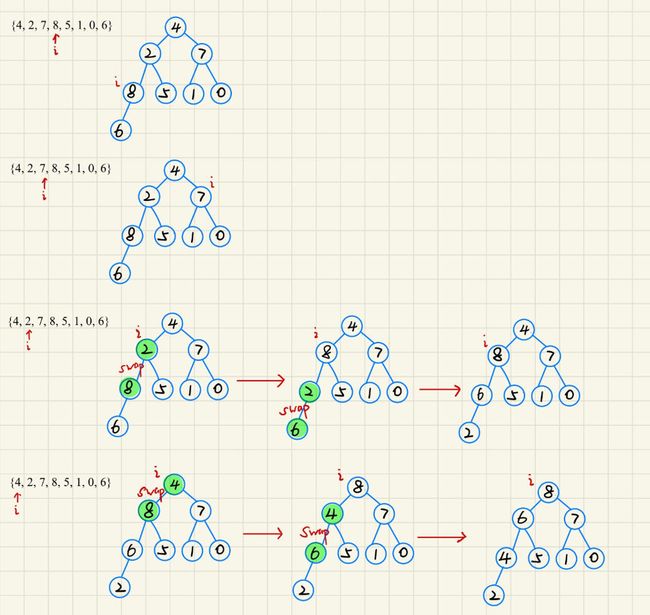
一. 从头遍历数组依次将元素 push 进堆, 即每 push 一个元素调用一次向上调整算法
二. 从最后一个不为叶子结点的结点开始向下调整,向前直到根节点, 即使用向下调整算法
- 使用插入建堆

void HeapArrayInit(Heap* hp, HPDatatype* a, int n)
{
assert(hp); //确保hp合法
hp->size = hp->capacity = n;
HPDatatype* tmp = (HPDatatype*)malloc(sizeof(HPDatatype) * n);
if (tmp == NULL)
{
perror("malloc");
}
hp->a = tmp;
memcpy(hp->a, a, sizeof(HPDatatype) * n);
//建堆
int i = 0;
for (i = 0; i < n; i++)
{
AdjustUp(hp->a,i);
}
}
由于每个向上调整算法是 O ( l o g N ) O(logN) O(logN)的时间复杂度, 一共有 N 个结点, 需要调用 N 次向上调整算法, 所以插入建堆的时间复杂度为 O ( N ∗ l o g N ) O(N*logN) O(N∗logN)
假设堆是满二叉树,方便运算.
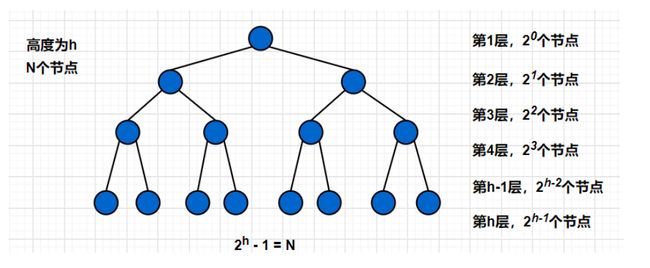
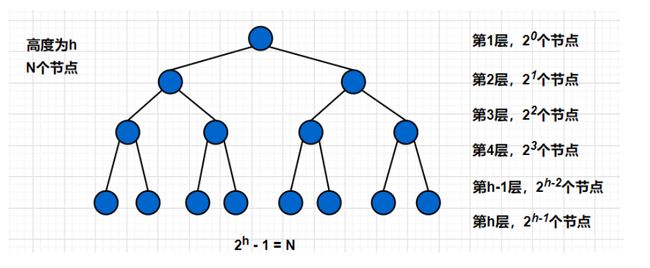
等式 1 : T ( N ) = 2 0 ∗ 0 + 2 1 ∗ 1 + . . . + 2 h − 1 ∗ ( h − 1 ) 等式1:T(N) = 2^0*0 + 2^1*1 +...+2^{h-1}*(h-1) 等式1:T(N)=20∗0+21∗1+...+2h−1∗(h−1)
等式 2 : 2 T ( N ) = 2 1 ∗ 0 + 2 2 ∗ 1 + . . . + 2 h ∗ ( h − 1 ) 等式2:2T(N) = 2^1*0 + 2^2*1 +...+2^h*(h-1) 等式2:2T(N)=21∗0+22∗1+...+2h∗(h−1)
等式2 - 等式1推出:
T ( N ) = − ( 2 1 + 2 2 + . . . + 2 h − 1 ) − 2 h ∗ ( h − 1 ) T(N) = -(2^1 + 2^2 +...+2^{h-1})-2^h*(h-1) T(N)=−(21+22+...+2h−1)−2h∗(h−1)
= 2 ∗ ( 1 − 2 h − 1 ) 1 − 2 − 2 h ∗ ( h − 1 ) = \frac{2*(1-2^{h-1})}{1-2} -2^h*(h-1) =1−22∗(1−2h−1)−2h∗(h−1)
= 2 h − 1 − 1 − 2 h ∗ ( h − 1 ) = 2^{h-1}-1-2^h*(h-1) =2h−1−1−2h∗(h−1)
又因为 h = l o g 2 ( N + 1 ) 即 2 h = N + 1 又因为 h = log_2(N+1) 即 2^h = N+1 又因为h=log2(N+1)即2h=N+1
最终 T ( N ) = N + 1 2 − 1 − ( N + 1 ) ∗ [ l o g 2 ( N + 1 ) − 1 ] = O ( N ∗ l o g N ) 最终 T(N) = \frac{N+1}{2} - 1 - (N+1)*[log_2(N+1) - 1] = O(N*logN) 最终T(N)=2N+1−1−(N+1)∗[log2(N+1)−1]=O(N∗logN)
- 从最后一个分支节点开始 由下向上 向下调整
void HeapArrayInit(Heap* hp, HPDatatype* a, int n)
{
assert(hp); //确保hp合法
hp->size = hp->capacity = n;
HPDatatype* tmp = (HPDatatype*)malloc(sizeof(HPDatatype) * n);
if (tmp == NULL)
{
perror("malloc");
}
hp->a = tmp;
memcpy(hp->a, a, sizeof(HPDatatype) * n);
int i = 0;
//从最后一个分支结点开始向下调整建堆
for (i = (n-2)/2; i >= 0; i--)
{
AdjustDown(hp->a, n, i);
}
}
让我们分析使用向下调整的时间复杂度,假设堆是满二叉树,方便计算.
等式 1 : T ( N ) = 2 0 ∗ ( h − 1 ) + 2 1 ∗ ( h − 2 ) + . . . + 2 h − 2 ∗ 1 等式1:T(N) = 2^0*(h-1) + 2^1*(h-2) +...+2^{h-2}*1 等式1:T(N)=20∗(h−1)+21∗(h−2)+...+2h−2∗1
等式 2 : 2 T ( N ) = 2 1 ∗ ( h − 1 ) + 2 2 ∗ ( h − 2 ) + . . . + 2 h − 1 ∗ 1 等式2:2T(N) = 2^1*(h-1) + 2^2*(h-2) +...+2^{h-1}*1 等式2:2T(N)=21∗(h−1)+22∗(h−2)+...+2h−1∗1
等式2 - 等式1推出:
T ( N ) = − ( h − 1 ) + 2 1 + 2 2 + . . . + 2 h − 2 + 2 h − 1 T(N) = -(h-1) + 2^1+2^2+...+2^{h-2}+2^{h-1} T(N)=−(h−1)+21+22+...+2h−2+2h−1
= − h + 2 0 + 2 1 + 2 2 + . . . + 2 h − 2 + 2 h − 1 = 1 ∗ ( 1 − 2 h ) 1 − 2 − h = -h + 2^0 +2^1+2^2+...+2^{h-2}+2^{h-1} = \frac{1*(1-2^h)}{1-2} -h =−h+20+21+22+...+2h−2+2h−1=1−21∗(1−2h)−h
= 2 h − 1 − h = 2^h-1-h =2h−1−h
又因为 h = l o g 2 ( N + 1 ) 即 2 h = N + 1 又因为 h = log_2(N+1) 即 2^h = N+1 又因为h=log2(N+1)即2h=N+1
最终 T ( N ) = N − l o g 2 ( N + 1 ) = O ( N ) 最终 T(N) = N - log_2(N+1) = O(N) 最终T(N)=N−log2(N+1)=O(N)
最终可以发现,两种方式不仅建堆的结果不同,而且由下向上的建堆方式时间复杂度更低.
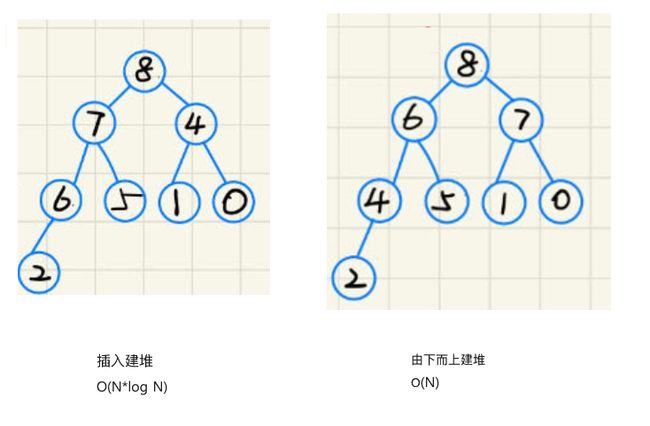
平常都是使用第二种方式进行建堆的
3.4 完整代码
Heap.h
#pragma once
#include Heap.c
#include "Heap.h"
void AdjustUp(HPDatatype* a, int child)
{
int parent = (child - 1) / 2;
while (child > 0)
{
if (a[child] > a[parent])
{
Swap(&a[child], &a[parent]);
child = parent;
parent = (child - 1) / 2;
}
else
{
break;
}
}
}
void AdjustDown(HPDatatype* a, int n, int parent)
{
int child = parent * 2 + 1;
while (child < n)
{
//找到更大的孩子
if (child + 1 < n && a[child + 1] > a[child])
{
child++;
}
//如果孩子比父亲大,交换元素
if (a[child] > a[parent])
{
Swap(&a[child], &a[parent]);
parent = child;
child = parent * 2 + 1;
}
else
{
break;
}
}
}
void Swap(HPDatatype* p1, HPDatatype* p2)
{
HPDatatype tmp = *p1;
*p1 = *p2;
*p2 = tmp;
}
void HeapInit(Heap* hp)
{
assert(hp); //确保hp合法
hp->a = NULL;
hp->size = hp->capacity = 0;
}
void HeapArrayInit(Heap* hp, HPDatatype* a, int n)
{
assert(hp); //确保hp合法
hp->size = hp->capacity = n;
HPDatatype* tmp = (HPDatatype*)malloc(sizeof(HPDatatype) * n);
if (tmp == NULL)
{
perror("malloc");
}
hp->a = tmp;
memcpy(hp->a, a, sizeof(HPDatatype) * n);
int i = 0;
//插入建堆
//for (i = 0; i < n; i++)
//{
// AdjustUp(hp->a,i);
//}
//从最后一个分支结点开始向下调整建堆
for (i = (n-2)/2; i >= 0; i--)
{
AdjustDown(hp->a, n, i);
}
}
void HeapPrint(Heap* hp)
{
assert(hp); //确保hp合法
int i = 0;
for (i = 0; i < hp->size; i++)
{
printf("%d ", hp->a[i]);
}
printf("\n");
}
void HeapDestroy(Heap* hp)
{
assert(hp); //确保hp合法
free(hp->a);
hp->a = NULL;
hp->size = hp->capacity = 0;
}
void HeapPush(Heap* hp, HPDatatype x)
{
assert(hp);
//扩容
if (hp->size == hp->capacity)
{
int newCapacity = hp->capacity == 0 ? 4 : 2 * hp->capacity;
HPDatatype* tmp = (HPDatatype*)realloc(hp->a, sizeof(HPDatatype) * newCapacity);
if (tmp != NULL)
{
hp->a = tmp;
hp->capacity = newCapacity;
}
else
{
perror("realloc");
}
}
//先将元素未查到数组末尾
hp->a[hp->size] = x;
//向上调整
AdjustUp(hp->a, hp->size);
//修改大小
hp->size++;
}
void HeapPop(Heap* hp)
{
assert(hp); //确保hp合法
assert(!HeapEmpty(hp)); //确保堆不为空
//交换最后一个元素和首元素
Swap(&hp->a[0], &hp->a[hp->size - 1]);
hp->size--;
//向下调整
AdjustDown(hp->a, hp->size, 0);
}
HPDatatype HeapTop(Heap* hp)
{
assert(hp);
assert(!HeapEmpty(hp));
return hp->a[hp->size-1];
}
int HeapEmpty(Heap* hp)
{
assert(hp); //确保hp合法
if (hp->size == 0)
{
return 1;
}
else
{
return 0;
}
}
test.c
#include "Heap.h"
void HeapTest1()
{
int a[] = {60, 70, 80, 50, 40, 30};
AdjustDown(a, 6, 0);
int i = 0;
for (i = 0; i < sizeof(a) / sizeof(a[0]); i++)
{
printf("%d ", a[i]);
}
printf("\n");
}
void HeapTest2()
{
Heap heap;
HeapInit(&heap);
HeapPush(&heap, 60);
HeapPush(&heap, 70);
HeapPush(&heap, 80);
HeapPush(&heap, 50);
HeapPush(&heap, 40);
HeapPrint(&heap);
HeapPush(&heap, 30);
AdjustDown(heap.a, 6, 0);
HeapPrint(&heap);
}
void HeapTest3()
{
Heap heap;
int a[] = {7, 8, 6, 4, 9, 2, 1, 0};
HeapArrayInit(&heap, a, 8);
HeapPrint(&heap);
HeapPop(&heap);
HeapPrint(&heap);
}
//升序
void HeapSort(int* a, int n)
{
int i = 0;
//建大堆
for (i = 0; i < n; i++)
{
AdjustUp(a, i);
}
//不断将根元素放置最后一个,让前面的元素向下调整
for (i = 0; i < n; i++)
{
Swap(&a[0], &a[n - 1 - i]);
AdjustDown(a, n - 1 - i, 0);
}
}
int main(void)
{
//HeapTest1();
//HeapTest2();
HeapTest3();
int a[] = {3,4,5,6,9,10,2};
HeapSort(a, sizeof(a) / sizeof(a[0]));
int i = 0;
for (i = 0; i < sizeof(a) / sizeof(a[0]); i++)
{
printf("%d ", a[i]);
}
printf("\n");
return 0;
}
4. 堆的应用
4.1 堆排序
堆排序即用堆的思想来进行排序.
总共分为两个步骤:
- 建堆
- 升序:建大堆
- 降序:建小堆
- 利用堆删除思想来进行排序
首先考虑,为什么升序只能建大堆,我建小堆不可以吗?
-
答案肯定是否定的.如果我建小堆,根据小堆的性质,小堆的根结点是最小数.此时 1 是最小值.
-
随后我忽视 1, 对剩下的元素进行堆排序,但是剩下的元素并不一定是堆.
忽视 1,2,3 后, 此时只剩下
但是此时剩下的数并不能构成小堆,需要我重新建堆
-
为了避免剩下的数不能构成小堆的情况,我需要每次都对剩下元素进行重新建堆.每一次将剩余元素前移需要消耗 O ( N ) O(N) O(N)的时间复杂度,同时上面已经讨论过,建堆至少也要消耗 O ( N ) O(N) O(N)的时间复杂度.
-
也就是说,这样操作的时间复杂度是 O ( N 2 ) O(N^2) O(N2),那我为什么不直接用代码更简便的冒泡排序呢?
堆排序的基本思想:
- 将待排序的序列构造成一个大顶堆.此时,整个序列的最大值就是堆顶的根结点.
- 将它移走(其实就是将其与堆数组的末尾元素交换,此时末尾元素就是最大值)
- 然后将剩余的 n-1 个序列重新构造成一个堆, 这样就会得到 n 个元素中的次大值.
- 如此反复执行,便能得到一个有序序列了.

//升序
void HeapSort(int* a, int n)
{
int i = 0;
//建大堆,从最后一个分支结点开始向下调整
for (i = (n-1-1)/2; i>=0; i--)
{
AdjustDown(a, n, i);
}
//将堆顶元素与堆底元素交换后,向下调整
int end = n - 1;
while (end > 0)
{
Swap(&a[0], &a[end]);
AdjustDown(a, end, 0);
--end;
}
}
堆排序时间复杂度分析:
- 首先建堆的时间复杂度为 O ( N ) O(N) O(N)
- 每次向下调整的时间复杂度为 O ( l o g N ) O(logN) O(logN), 一共会有 n-1 次.那么就是 O ( N ∗ l o g N ) O(N*logN) O(N∗logN)
- 所以总体来说L:堆排序的时间复杂度是 O ( N ∗ l o g N ) O(N*logN) O(N∗logN), 最好,最坏和平均时间复杂度都是如此.
4.2 TopK问题
在 N 个数中找出最大的前 K 个 (比如在1000个数中找出最大的前10个)
- 方法一:按降序 堆排序 所有的元素, 前 K 个元素就是最大的前 K 个元素
时间复杂度: O ( N ∗ l o g N ) O(N*logN) O(N∗logN)
有没有更优化的呢?我只需要取前 K 个, 那么我并不需要将所有的元素都排序.
- 方法二:先建大堆, Pop K 次, 取到最大的 K 个数
时间复杂度: O ( N + l o g N ∗ K ) O(N + logN*K) O(N+logN∗K)
空间复杂度: O ( N ) O(N) O(N)
还是有点复杂,如果N很大的话,空间复杂度也会很大.
假设 N 是10亿,我需要先建一个占据 10亿字节的堆, 10亿字节约为 1G 空间,这所消耗的空间是巨大的.
- 方法三:
- 用前 K 个数先建小堆
- 剩下的 N-K 个数, 依次和堆顶元素进行比较. 如果比堆顶元素大, 替换堆顶元素并且向下调整.
- 遍历完 N 个数后, 最后堆里的 K 个数就是最大的 K 个数
时间复杂度: O ( K + ( N − K ) ∗ l o g K ) = O ( N ∗ l o g K ) O(K + (N-K)*logK) = O(N*logK) O(K+(N−K)∗logK)=O(N∗logK)
空间复杂度: O ( K ) O(K) O(K)
为什么建的是小堆呢?
最大的 K 个数一定比其他的数都要大, 同时小堆大数会沉底. 也就是说, 留在堆顶的只能是第 K 个大的数, 或者是其他比 第 K 个大的数 小的数.这样最大的 K 个数一定会进堆.
代码实现
首先我写了个CreateData()函数用来往文件中存放数据,我存放的数的范围是 [ 0 , 10000000 ) [0,10000000) [0,10000000),为了验证我之后写的代码是否能找到前 K 个数, 我在 data 文件中修改了 K 个数, 都比 10000000 大.
void CreateData()
{
//打开文件
FILE* fout = fopen("data", "w+");
if (fout == NULL)
{
perror("fopen");
}
//随机放数
srand(time(0));
int i = 0;
int n = 10000000;
for (i = 0; i < 10000; i++)
{
int num = (rand() + i) % n;
fprintf(fout, "%d\n", num);
}
fclose(fout);
}
接着是解决 TopK 的核心代码
//小堆向下调整
void AdjustDown_small(HPDatatype* a, int n, int parent)
{
assert(a);
int child = parent * 2 + 1;
while (child < n)
{
if (child + 1 < n && a[child + 1] < a[child])
{
child++;
}
if (a[parent] > a[child])
{
Swap(&a[parent], &a[child]);
parent = child;
child = parent * 2 + 1;
}
else
{
break;
}
}
}
//得到n个数中的最大k个
void PrintTopK(const char* filename, int k)
{
//打开文件
FILE* fout = fopen(filename, "r");
if (fout == NULL)
{
perror("fopen");
}
//申请一个大小为k的数组空间
int* a = (int*)malloc(sizeof(int) * k);
//先将前k个数据建小堆
int i = 0;
for (i = 0; i < k; i++)
{
fscanf(fout, "%d", &a[i]);
}
for (i = (k-2)/2; i>=0; i--)
{
AdjustDown_small(a, k, i);
}
//遍历剩余的数,如果有比堆顶大的数,入堆并向下调整
int num = 0;
while (fscanf(fout, "%d", &num) != EOF)
{
//如果num大于堆顶元素,入堆并向下调整
if (num > a[0])
{
a[0] = num;
AdjustDown_small(a, k, 0);
}
}
fclose(fout);
for (i = 0; i < k; i++)
{
fprintf(stdout, "%d\n", a[i]);
}
free(a);
}
结果如下:
k = 10:

k = 11:

本章完.