GAT学习
文章目录
- GAT
- 注意力机制的定义
- 图注意力层
- 多头注意力机制
- GATConv层中forward函数步骤解析:
-
- 1. 计算wh。wh:带权特征向量
- 2. 计算注意力分数e
- 3. 激活注意力分数e
- 4. 由边的索引获取邻接矩阵
- 5. 获得注意力分数矩阵。 attention[i][j]表示i j之间的注意力分数
-
- torch.where详解:
- 6. 归一化注意力分数
- 7. 加权融合特征向量
- 8.添加偏置
- 完整代码
- 后记
GAT
由于
信息处理能力的局限,人类会选择性地关注完整信息中的某一部分,同时忽略其他信息。这种机制大大提高了人类对信息的处理效率。
注意力机制的核心在于对给定信息进行权重分配,权重高的信息意味着需要系统进行重点加工。
图注意力网络(Graph Attention Networks):自动学习图中节点对节点之间的影响度
注意力机制的定义

上式中:
Source是需要系统处理的信息源
Query代表某种条件或者先验信息
Attention Value是给定Query信息的条件下,通过注意力机制从Source中提取得到的信息。
similarity(Query,Keyi)表示Query向量和Key向量的相关度,最直接的方法是可以取两向量的内积
图注意力层
上图中,hi:hi∈Rd(l)任意节点vi在第l层所对应的特征向量。
经过一个以注意力机制为核心的聚合操作之后,输出的是每个节点的新的特征向量hi’, hi’∈Rd(l+1)。我们将这个聚合操作称为图注意力层。
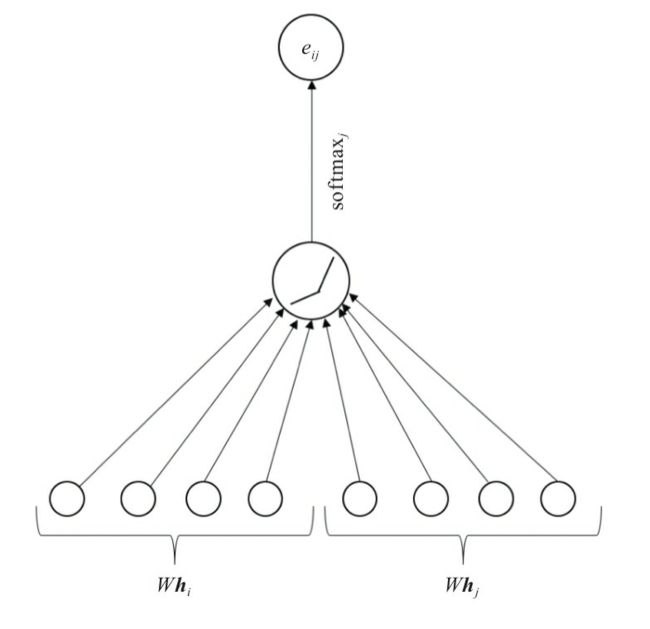
假设中心节点为vi, 我们设邻居节点Vj到vi的权重系数eij 为:

W∈Rd(l+1)xd(l) 是该层节点特征变换的权重系数。
α(·) 是计算两个节点相关度的函数。原则上可以计算图中任意一个节点到节点vi的权重系数,为简化计算将其限制在一节邻居内(在GAT中,将自己也视为自己的邻居)。这里的α可以用向量的内积,只要保证最后输出一个实数就可以。
这里采用如下方程:

α是一个权重参数,α∈R2d(l+1).这个R表示是实数,2d表示长度,l+1是层数。
W∈Rd(l+1)xd(l) 是该层节点特征变换的权重系数。
hi hj表示节点的特征向量。
 αij表示i-j之间的attention系数。 表示i-j之间的关联程度,重要性之类的。GAT使用自注意力机制来计算节点的邻居节点对节点 i 的贡献,并以加权的方式将邻居节点的特征融合到节点 i 的特征中。
αij表示i-j之间的attention系数。 表示i-j之间的关联程度,重要性之类的。GAT使用自注意力机制来计算节点的邻居节点对节点 i 的贡献,并以加权的方式将邻居节点的特征融合到节点 i 的特征中。
h i ~ \widetilde{h~i~} h i 表示i节点的特征。
W是一个系数
[Whi||Whj] 表示将两个特征拼接在一起
a ⃗ \vec{a} aT 表示一个可学习的系数。
h ⃗ \vec{h} hj表示j节点(为 i 的邻居)的特征
h ⃗ \vec{h} hi表示节点i的特征
h ⃗ \vec{h} hi’ 表示i节点聚合了所有邻居之后的特征。
eij: 邻居节点vj到vi的权重系数
whi 是节点i的特征表示hi经过权重矩阵weight_w的线性变换后得到的结果, 可以理解为“节点i的权重特征”或“节点i的特征映射”

多头注意力机制
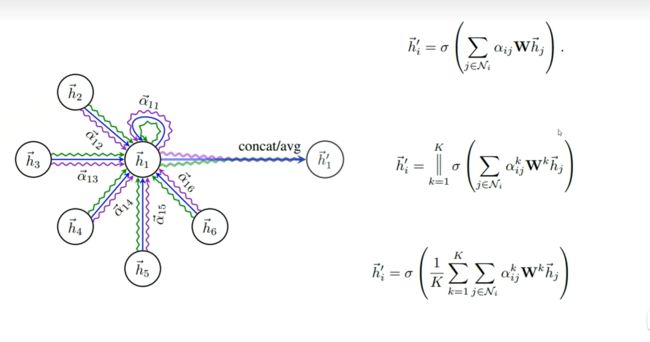
h ⃗ \vec{h} hi’ 表示i节点聚合了所有邻居之后的特征。
第二行的表示选取了多个参数,(αij、W)得到节点的多个特征向量。||表示将这些特征向量拼接到一起。
第三行是将多个特征向量求和取平均。
GATConv层中forward函数步骤解析:
1. 计算wh。wh:带权特征向量
这里的wh是所有节点的带权特征向量,whi和whj都包含在其中。
x是所有节点的初始特征向量,与weight_w这样一个权重相乘后得到带权特征向量。
wh = torch.mm(x, self.weight_w) # 公式中的[Whi||whj], 包含所有结点的特征表示,每一行对应一个节点的特征 wh:[2708,16], x:[2708,1433], weight_w:[1433, 16]
2. 计算注意力分数e
e是一个考虑了所有点,但是没有考虑邻居关系的注意力分数矩阵。eij表示邻居节点vj到vi的权重系数,也叫注意力分数。就是vj对于vi来说的的注意力系数是多少。这里考虑了任意两个节点的注意力系数,但是GAT中只需要考虑一阶邻居的注意力系数(自己也算自己的邻居)
e = torch.mm(wh, self.weight_a[: self.out_channels]) + torch.matmul(wh, self.weight_a[self.out_channels:]).T # 公式中的eij, 表示注意力分数
3. 激活注意力分数e
e = self.leakyrelu(e)
4. 由边的索引获取邻接矩阵
if self.adj == None:
self.adj = to_dense_adj(edge_index).squeeze() # 将稀疏邻接矩阵转换为密集邻接矩阵
# 添加自环,考虑自身加权
if self.add_self_loops:
self.adj += torch.eye(x.shape[0]).to(device)
5. 获得注意力分数矩阵。 attention[i][j]表示i j之间的注意力分数
这里的注意力分数矩阵attention是从注意力分数e演变过来的。前面说e考虑了任意两点之间的权重系数,但是我们只要一阶邻居的,所以这里是做了这么个操作。
attention = torch.where(self.adj > 0, e, -1e9 * torch.ones_like(e))
torch.where详解:
torch.where(condition, a, b)
如果condition满足,返回a,如果不满足,返回b
6. 归一化注意力分数
因为要保证所有邻居的权重系数和为1,所以要进行归一化。
attention = F.softmax(attention, dim=1) # attention:[2708, 2708]
7. 加权融合特征向量
前面的一系列操作就是为了得到注意力系数矩阵attention,然后要将原来的特征项向量hi通过注意力系数进行加权:
output = torch.mm(attention, wh) # output: [2707,2708]*[2708,16]=[2708,16]
8.添加偏置
if self.bias != None:
return output + self.bias.squeeze().unsqueeze(0) # self.bias是[16, 1],要变成[16]或者[1, 16]才能自动broadcast相加。可以不用unsqueeze()
else:
return output
完整代码
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
from scipy.sparse import coo_matrix
from torch_geometric.datasets import Planetoid
from torch_geometric.utils import to_dense_adj
# 1.加载Cora数据集
dataset = Planetoid(root='./data/Cora', name='Cora') # 从PYG中加载数据集,保存到本地根目录的/data/Cora下
# 2.定义GATConv层
class GATConv(nn.Module):
def __init__(self, in_channels, out_channels, heads=1, add_self_loops=True, bias=True): # GATConv1: in_channels:1433, out_channel:16
super(GATConv, self).__init__() # 子类的初始化,但是在调用子类的初始化时会调用父类的初始化,所以相当于调用nn.Moudle的初始化
self.in_channels = in_channels # 输入图节点的特征数
self.out_channels = out_channels # 输出图节点的特征数
self.adj = None
self.add_self_loops = add_self_loops
# 定义参数 θ
self.weight_w = nn.Parameter(torch.FloatTensor(in_channels, out_channels)) #公式中的W [1433, 16] nn.Parameter()将张量封装为可训练参数。
self.weight_a = nn.Parameter(torch.FloatTensor(out_channels * 2, 1)) #公式中的a^T weight_a:[32,1] 由于要和[Whi||whj]拼接在一起,所以size要*2
# weight_a: 将节点的特征映射成注意力分数
if bias:
self.bias = nn.Parameter(torch.FloatTensor(out_channels, 1))
else:
self.register_parameter('bias', None) # 注册上一个参数
self.leakyrelu = nn.LeakyReLU()
self.init_parameters()
# 初始化可学习参数
def init_parameters(self):
nn.init.xavier_uniform_(self.weight_w) # 使用xavier初始化方式初始化参数
nn.init.xavier_uniform_(self.weight_a)
if self.bias != None:
nn.init.zeros_(self.bias)
def forward(self, x, edge_index):
# 1.计算wh,进行节点空间映射 wh:带权特征向量
wh = torch.mm(x, self.weight_w) # 公式中的[Whi||whj], 包含所有结点的特征表示,每一行对应一个节点的特征 wh:[2708,16], x:[2708,1433], weight_w:[1433, 16]
# 2.计算注意力分数e e:[2708, 2708],用到了广播机制 由[2708, 1] + [1, 2708]搞起来的.
# 第一项得到一个点对其他点的注意力分数,第二项一转置得到所有点对其他点的注意力分数,然后通过广播机制相加,得到所有点对所有点的注意力分数。
# 但是这里只是初始化的,并未考虑节点的邻居关系。
e = torch.mm(wh, self.weight_a[: self.out_channels]) + torch.matmul(wh, self.weight_a[self.out_channels:]).T # 公式中的eij, 表示注意力分数
# 3.激活
e = self.leakyrelu(e)
# 4.由边的索引获取邻接矩阵
if self.adj == None:
self.adj = to_dense_adj(edge_index).squeeze() # 将稀疏邻接矩阵转换为密集邻接矩阵
# 添加自环,考虑自身加权
if self.add_self_loops:
self.adj += torch.eye(x.shape[0]).to(device)
# 5.获得注意力分数矩阵。 attention[i][j]表示i j之间的注意力分数
attention = torch.where(self.adj > 0, e, -1e9 * torch.ones_like(e))
# 6.归一化注意力分数
attention = F.softmax(attention, dim=1) # attention:[2708, 2708]
# 7.加权融合特征向量
output = torch.mm(attention, wh) # output: [2707,2708]*[2708,16]=[2708,16]
# 8.添加偏置
if self.bias != None:
return output + self.bias.squeeze().unsqueeze(0) # self.bias是[16, 1],要变成[16]或者[1, 16]才能自动broadcast相加
else:
return output
# 3.定义GAT网络
class GAT(nn.Module):
def __init__(self, num_node_features, num_classes): # num_node_features:1433 num_classes:7
super(GAT, self).__init__()
self.conv1 = GATConv(in_channels=num_node_features,
out_channels=32,
heads=2) #heads表示多头
self.conv2 = GATConv(in_channels=32,
out_channels=16,
heads=2)
self.conv3 = GATConv(in_channels=16,
out_channels=num_classes,
heads=1)
def forward(self, data):
x, edge_index = data.x, data.edge_index
x = self.conv1(x, edge_index) # 将节点特征x和边的索引edge_index作为输入通道和输出通道
x = F.relu(x)
x = F.dropout(x, training=self.training) # training用于区分是否是训练模式
x = self.conv2(x, edge_index)
x = F.relu(x)
return F.log_softmax(x, dim=1) # 计算节点的类别概率分布
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu') # 设备
epochs = 200 # 学习轮数 训练轮数
lr = 0.0003 # 学习率
num_node_features = dataset.num_node_features # 每个节点的特征数
num_classes = dataset.num_classes # 每个节点的类别数
data = dataset[0].to(device) # Cora的一张图
# 4.定义模型
model = GAT(num_node_features, num_classes).to(device) # 将模型放到指定设备上运算
optimizer = torch.optim.Adam(model.parameters(), lr=lr) # 优化器
loss_function = nn.NLLLoss() # 损失函数
# 训练模式
model.train()
for epoch in range(epochs):
pred = model(data)
loss = loss_function(pred[data.train_mask], data.y[data.train_mask]) # 损失
correct_count_train = torch.eq(pred[data.train_mask].argmax(axis=1), data.y[data.train_mask]).sum().item() # epoch正确分类数目
# correct_count_train = pred.argmax(axis=1)[data.train_mask].eq(data.y[data.train_mask]).sum().item() # epoch正确分类数目
acc_train = correct_count_train / data.train_mask.sum().item() # epoch训练精度
optimizer.zero_grad()
loss.backward()
optimizer.step()
if epoch % 20 == 0:
print("【EPOCH: 】%s" % str(epoch + 1))
print('训练损失为:{:.4f}'.format(loss.item()), '训练精度为:{:.4f}'.format(acc_train))
print('【Finished Training!】')
# 模型验证
model.eval()
pred = model(data)
# 训练集(使用了掩码)
# 再在测试集上看看效果
correct_count_train = pred.argmax(axis=1)[data.train_mask].eq(data.y[data.train_mask]).sum().item()
acc_train = correct_count_train / data.train_mask.sum().item()
loss_train = loss_function(pred[data.train_mask], data.y[data.train_mask]).item()
# 测试集
correct_count_test = pred.argmax(axis=1)[data.test_mask].eq(data.y[data.test_mask]).sum().item()
acc_test = correct_count_test / data.test_mask.sum().item()
loss_test = loss_function(pred[data.test_mask], data.y[data.test_mask]).item()
print('Train Accuracy: {:.4f}'.format(acc_train), 'Train Loss: {:.4f}'.format(loss_train))
print('Test Accuracy: {:.4f}'.format(acc_test), 'Test Loss: {:.4f}'.format(loss_test))
后记
今天,花了一天的时间学这个。对我来说,我觉得进步很大,终于不是一头雾水了,终于拨开云雾见青天了。
生活,重要是过的开心,最好的方法就是享受当下。