杂草里的农作物识别(Python代码)
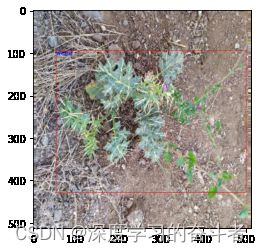
1.数据集(一共1300张照片,每张照片有对应的目标检测标签)
开始图像
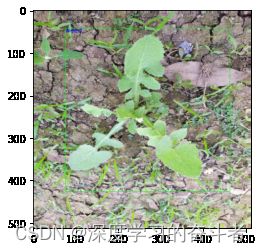
截止图像
列举

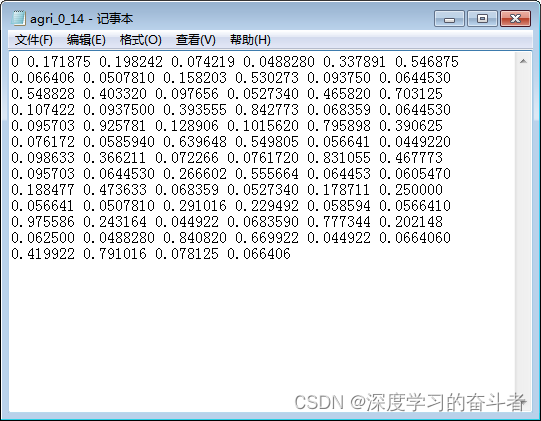
对应的目标检测标签
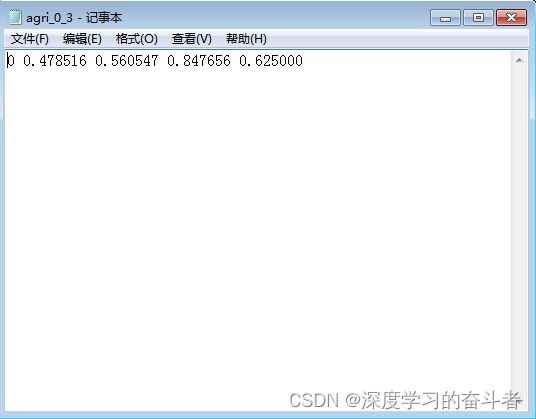

对应的目标检测标签

2.代码
import numpy as np
import pandas as pd
import torch
import glob
from torch.utils.data import Dataset, DataLoader, random_split
from PIL import Image
import torchvision
import cv2
import matplotlib.pyplot as plt
from tqdm import tqdm
import gc
# 获取JPEG文件和相应的TXT文件
jpegs = glob.glob('./data/agri_data/data/*.jpeg')
txts = [i.rsplit('.', maxsplit=1)[0] + '.txt' for i in jpegs]
jpegs[0]
# 定义图像转换器
transformer = torchvision.transforms.Compose([torchvision.transforms.ToTensor()])
# 创建自定义数据集类
class GenData(Dataset):
def __init__(self, jpegs, txts, transformer):
self.jpegs = jpegs
self.txts = txts
self.transformer = transformer
def __getitem__(self, item):
img = Image.open(jpegs[item]).convert('RGB')
img = transformer(img)
df = pd.read_csv(txts[item], header=None, sep=' ')
df.columns = ['label', 'x_cen', 'y_cen', 'w', 'h']
df['xmin'] = (df['x_cen'] - df['w'] / 2) * 512
df['ymin'] = (df['y_cen'] - df['h'] / 2) * 512
df['xmax'] = (df['x_cen'] + df['w'] / 2) * 512
df['ymax'] = (df['y_cen'] + df['h'] / 2) * 512
bbox = np.array(df.iloc[:, 5:]).tolist()
label = np.array(df.iloc[:, 0]).squeeze().tolist()
bbox = torch.tensor(bbox, dtype=torch.float32)
label = torch.as_tensor(label, dtype=torch.int64).reshape(-1,)
target = {}
target['boxes'] = bbox
target['labels'] = label
return img, target
def __len__(self):
return len(self.jpegs)
# 创建数据集实例
dataset = GenData(jpegs, txts, transformer)
# 划分训练集和测试集
train_len = int(dataset.__len__() * 0.7)
test_len = int(dataset.__len__() - train_len)
dataset_train, dataset_test = random_split(dataset, [train_len, test_len])
# 定义collate函数
def detection_collate(x):
return list(tuple(zip(*x)))
# 创建训练和测试数据加载器
dl_train = DataLoader(dataset_train, 1, shuffle=True, collate_fn=detection_collate)
dl_test = DataLoader(dataset_test, 1, shuffle=True, collate_fn=detection_collate)
# 定义类别标签
class_idx1 = {0: '作物', 1: '杂草'}
# 显示训练图像
def train_img_show(dl_train, class_idx1):
img, label = next(iter(dl_train))
img_sample = np.transpose(np.array(img[0]), (1, 2, 0)) * 255
img_sample = img_sample.astype(np.uint8)
img_sample = img_sample.copy()
box1 = label[0]['boxes'].numpy()
label1 = label[0]['labels'].numpy()
for i in range(len(label1)):
x1, y1, x2, y2 = int(box1[i][0]), int(box1[i][1]), int(box1[i][2]), int(box1[i][3])
label = str(class_idx1[label1[i]])
cv2.rectangle(img_sample, (x1, y1), (x2, y2), (0, 255, 0), 1)
cv2.putText(img_sample, text=label, fontScale=0.5, fontFace=cv2.FONT_HERSHEY_SIMPLEX, thickness=1,
lineType=cv2.LINE_AA, color=(0, 0, 255), org=(x1, y1 + 10))
plt.imshow(img_sample)
train_img_show(dl_train, class_idx1)
# 创建Faster R-CNN模型
model = torchvision.models.detection.fasterrcnn_resnet50_fpn(num_classes=3)
model = model
params = [p for p in model.parameters() if p.requires_grad]
optimizer = torch.optim.Adam(params, lr=0.0001)
loss_list = []
# 训练一个epoch的函数
def train_one_epoch(model, optimizer, dl_train, dl_test, epochs):
for epoch in range(epochs):
loss_epoch = []
iou_epoch = []
for images, targets in tqdm(dl_train):
model.train()
images = list(image for image in images)
targets = [{k: v for k, v in t.items()} for t in targets]
loss_dict = model(images, targets)
losses = sum(loss for loss in loss_dict.values())
optimizer.zero_grad()
losses.backward()
optimizer.step()
with torch.no_grad():
model.eval()
loss_epoch.append(losses.cpu().numpy())
label = targets
try:
pred = model(images)
for i in range(len(pred)):
pic_boxes = pred[i]['boxes']
label_boxes = label[i]['boxes']
iou_tensor = torchvision.ops.box_iou(label_boxes, pic_boxes)
iou_total = np.mean(torch.max(iou_tensor, dim=1)[0].cpu().numpy())
iou_epoch.append(iou_total)
except:
continue
test_loss_epoch = []
test_iou_epoch = []
gc.collect()
torch.cuda.empty_cache()
for images, targets in tqdm(dl_test):
model.train()
images = list(image for image in images)
targets = [{k: v for k, v in t.items()} for t in targets]
loss_dict = model(images, targets)
losses = sum(loss for loss in loss_dict.values())
with torch.no_grad():
model.eval()
test_loss_epoch.append(losses.cpu().numpy())
label = list(targets)
try:
pred = model(images)
for i in range(len(pred)):
pic_boxes = pred[i]['boxes']
label_boxes = label[i]['boxes']
iou_tensor = torchvision.ops.box_iou(label_boxes, pic_boxes)
iou_total = np.mean(torch.max(iou_tensor, dim=1)[0].cpu().numpy())
test_iou_epoch.append(iou_total)
except:
continue
mIou = np.mean(iou_epoch)
epochloss = np.mean(loss_epoch)
test_mIou = np.mean(test_iou_epoch)
test_epochloss = np.mean(test_loss_epoch)
static_dict = model.state_dict()
torch.save(static_dict, './{}test_mIou_{}test_loss{}.pth'.format(epoch, round(test_mIou, 3), round(test_epochloss, 3)))
print('\n',
'epoch:', epoch,
'epoch_mIou:', mIou,
'epoch_loss:', epochloss,
'test_epoch_mIou:', test_mIou,
'test_epoch_loss:', test_epochloss)
gc.collect()
torch.cuda.empty_cache()
# 训练模型
train_one_epoch(model, optimizer, dl_train, dl_test, 15)
# 模型评估
model.eval()
names = {'0': '作物', '1': '杂草'}
src_img = plt.imread(r"../input/crop-and-weed-detection-data-with-bounding-boxes/agri_data/data/agri_0_113.jpeg")
img = cv2.cvtColor(src_img, cv2.COLOR_BGR2RGB)
img_tensor = torch.from_numpy(img/255.).permute(2,0,1).float().cuda()
out = model(torch.unsqueeze(img_tensor, dim=0))
boxes = out[0]['boxes'].cpu().detach().numpy().astype(int)
labels = out[0]['labels'].cpu().detach().numpy()
scores = out[0]['scores'].cpu().detach().numpy()
for idx in range(boxes.shape[0]):
if scores[idx] >= 0.8:
x1, y1, x2, y2 = boxes[idx][0], boxes[idx][1], boxes[idx][2], boxes[idx][3]
name = names.get(str(labels[idx].item()))
cv2.rectangle(src_img, (x1, y1), (x2, y2), (255, 0, 0), thickness=1)
cv2.putText(src_img, text=name, org=(x1, y1 + 10), fontFace=cv2.FONT_HERSHEY_SIMPLEX,
fontScale=0.5, thickness=1, lineType=cv2.LINE_AA, color=(0, 0, 255))
plt.imshow(src_img)
效果
对数据集感兴趣的,可以关注最后两行
import numpy as np
import pandas as pd
import torch
import glob
from torch.utils.data import Dataset,DataLoader,random_split
from PIL import Image
import torchvision
import cv2
import matplotlib.pyplot as plt
from tqdm import tqdm
import gc
#数据集:https://mbd.pub/o/bread/mbd-ZJ6alJxp
import numpy as np