机器人中的数值优化(十九)—— SOCP锥规划应用:时间最优路径参数化(TOPP)
本系列文章主要是我在学习《数值优化》过程中的一些笔记和相关思考,主要的学习资料是深蓝学院的课程《机器人中的数值优化》和高立编著的《数值最优化方法》等,本系列文章篇数较多,不定期更新,上半部分介绍无约束优化,下半部分介绍带约束的优化,中间会穿插一些路径规划方面的应用实例
三十一、时间最优路径参数化(TOPP)
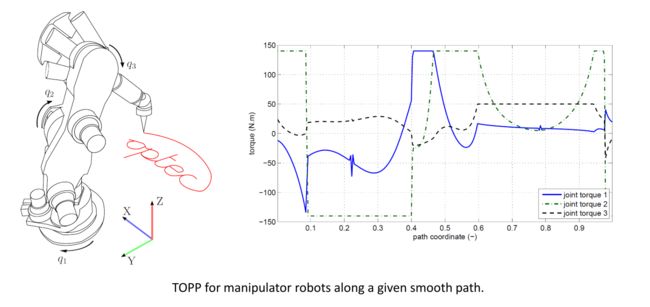
如果我们有一条二阶连续可微的路径q,现在我们想要机器人去跟踪这个路径,需要给这条路径加入时间属性,同时使其满足机器人的动力学约束,路径可由弧长s变量参数化,将路径分割成若干段小路径,我们可以知道每段小路径对应的空间位置,但是缺乏时间属性,TOPP就是在给定的平滑路径 q ( s ) q(s) q(s)上生成时间信息,并使得在满足机器人动力学约束的前提下,路径花费的时间应该尽可能短。

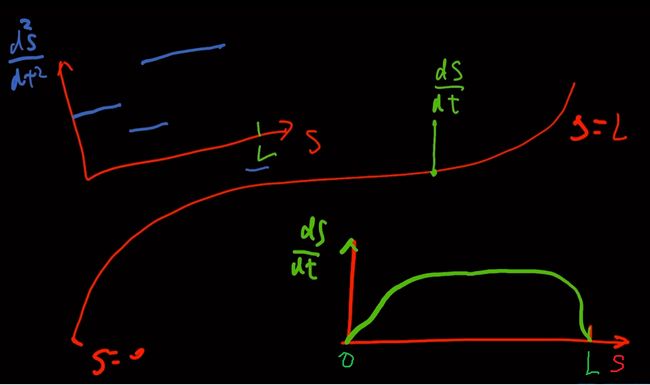
使用弧长参数s来对路径进行参数化,s的值表征的是距离路径起点所走过的路径距离,在下图的例子中,左下角路径的起点处s=0,右上角路径的终点处s=L,L即该路径的总长度,对于该路径,我们可以用 d s d t \frac{\mathrm{d}s}{\mathrm{d}t} dtds来表征路径上某个位置处的速度,它是连续的,如下图中右下角的曲线所示,同理,可以用 d 2 s d t 2 \frac{\mathrm{d}^2s}{\mathrm{d}t^2} dt2d2s来表征路径上某个位置处的加速度,它可以是不连续的,如下图中左上角的曲线所示。
–
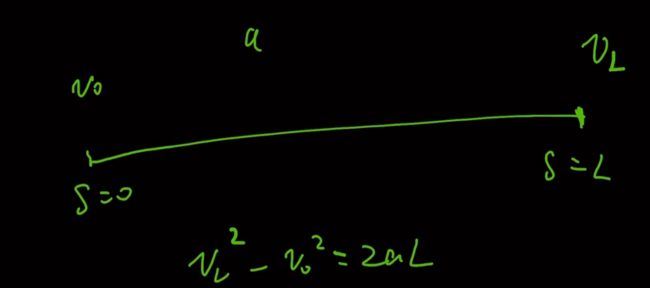
现在,我们假设把s拉成直线,对于匀加速运动,起点s=0处的速度为 v 0 v_0 v0,终点s=L处的速度为 v L v_L vL,由基础的物理学公式可知 v L 2 − v 0 2 = 2 a L v_L^2-v_0^2=2aL vL2−v02=2aL,进一步可知:
lim L → 0 V L 2 − V 0 2 L = 2 a \operatorname*{lim}_{L\rightarrow0}\frac{V_{L}^{2}-V_{0}^{2}}{L}=2a L→0limLVL2−V02=2a
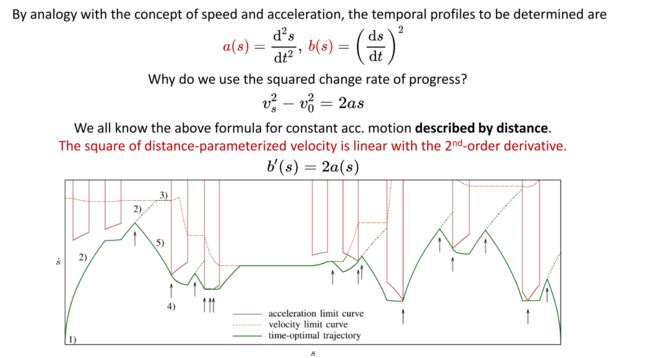
也即 d v 2 d s = 2 a \frac{dv^{2}}{ds}=2a dsdv2=2a,我们得到了一个不依赖于时间属性的微分关系,我们以弧长s为参量的话, v 2 v^2 v2与2a是线性的微分关系, v 2 v^2 v2可以用 ( d s d t ) 2 \left(\frac{\mathrm{d}s}{\mathrm{d}t}\right)^2 (dtds)2表示
通过类比以上速度和加速度的概念,我们可以得到
a ( s ) = d 2 s d t 2 , b ( s ) = ( d s d t ) 2 v s 2 − v 0 2 = 2 a s b ′ ( s ) = 2 a ( s ) \begin{gathered}a(s)=\frac{\mathrm{d}^2s}{\mathrm{d}t^2},b(s)=(\frac{\mathrm{d}s}{\mathrm{d}t})^2\\\\v_s^2-v_0^2=2as\\\\b^{\prime}(s)=2a(s)\end{gathered} a(s)=dt2d2s,b(s)=(dtds)2vs2−v02=2asb′(s)=2a(s)
其实,我们想要在一系列的约束下,找一个s与s’的时间最优的轨迹
我们想要整个轨迹在动力学约束下时间最短,也就是最小化总的时间T,由于我们缺乏时间信息,所以,需要进行换元,将对时间的积分转换成对弧长s的积分,如下式所示:
T = ∫ 0 T 1 d t = ∫ s ( 0 ) s ( T ) 1 d s / d t d s = ∫ 0 L 1 d s / d t d s = ∫ 0 L 1 b ( s ) d s T=\int_0^T1\mathrm{~d}t=\int_{s(0)}^{s(T)}\frac1{\mathrm{d}s/\mathrm{d}t}\mathrm{d}s=\int_0^L\frac1{\mathrm{d}s/\mathrm{d}t}\mathrm{d}s=\int_0^L\frac1{\sqrt{b(s)}}\mathrm{d}s T=∫0T1 dt=∫s(0)s(T)ds/dt1ds=∫0Lds/dt1ds=∫0Lb(s)1ds
利用链式求导法则可以得到真实的速度 d q d t \frac{\mathrm{d}q}{\mathrm{d}t} dtdq和加速度 d 2 q d t 2 \frac{\mathrm{d}^2q}{\mathrm{d}t^2} dt2d2q,分别与 d s d t \frac{\mathrm{d}s}{\mathrm{d}t} dtds、 d 2 s d t 2 \frac{\mathrm{d}^{2}s}{\mathrm{d}t^{2}} dt2d2s的关系,如下所示:
d q d t = q ′ ( s ) d s d t = q ′ ( s ) b ( s ) \frac{\mathrm{d}q}{\mathrm{d}t}=q^{\prime}(s)\frac{\mathrm{d}s}{\mathrm{d}t}=q^{\prime}(s)\sqrt{b(s)} dtdq=q′(s)dtds=q′(s)b(s)
d 2 q d t 2 = q ′ ′ ( s ) ( d s d t ) 2 + q ′ ( s ) d 2 s d t 2 = q ′ ′ ( s ) b ( s ) + q ′ ( s ) a ( s ) \frac{\mathrm{d}^2q}{\mathrm{d}t^2}=q^{\prime\prime}(s){\left(\frac{\mathrm{d}s}{\mathrm{d}t}\right)}^2+q^{\prime}(s)\frac{\mathrm{d}^2s}{\mathrm{d}t^2}=q^{\prime\prime}(s)b(s)+q^{\prime}(s)a(s) dt2d2q=q′′(s)(dtds)2+q′(s)dt2d2s=q′′(s)b(s)+q′(s)a(s)
若我们只考虑向前运动的情况,则b(s)≥0应该严格成立,并仅在某个或某几个瞬间为0.
因此,我们可以将这个简单的TOPP问题表述为:
min a ( s ) , b ( s ) ∫ 0 L 1 b ( s ) d s s . t . b ( s ) ≥ 0 , ∀ s ∈ [ 0 , L ] , b ′ ( s ) = 2 a ( s ) , ∀ s ∈ [ 0 , L ] , ∥ q ′ ( s ) b ( s ) ∥ ∞ ≤ v m a x , ∀ s ∈ [ 0 , L ] , ∥ q ′ ′ ( s ) b ( s ) + q ′ ( s ) a ( s ) ∥ ∞ ≤ a m a x , ∀ s ∈ [ 0 , L ] , b ( 0 ) = b 0 , b ( L ) = b L . \begin{aligned} \min_{a(s),b(s)}& \int_0^{\color{blue}{L}}\frac{1}{\sqrt{b(s)}}\mathrm{d}s \\ \mathrm{s.t.}& b(s)\geq0, \forall s\in[0,L], \\ &b^{\prime}(s)=2a(s), \forall s\in[0,L], \\ &\left\|\color{blue}{q^{\prime}(s)}\color{black}\sqrt{b(s)}\right\|_\infty\leq\color{blue}{v_{max}}, \color{black}\forall s\in[0,L], \\ &\left\|\color{blue}{q^{\prime\prime}(s)\color{black}b(s)+\color{blue}q^{\prime}(s)\color{black}a(s)}\right\|_\infty\leq\color{blue}{a_{max}},\color{black}\quad\forall s\in[0,L], \\ &b(0)=\color{blue}{b_0},\color{black}~b(L)=\color{blue}{b_L}. \end{aligned} a(s),b(s)mins.t.∫0Lb(s)1dsb(s)≥0,∀s∈[0,L],b′(s)=2a(s),∀s∈[0,L], q′(s)b(s) ∞≤vmax,∀s∈[0,L],∥q′′(s)b(s)+q′(s)a(s)∥∞≤amax,∀s∈[0,L],b(0)=b0, b(L)=bL.
其中 min a ( s ) , b ( s ) ∫ 0 L 1 b ( s ) d s \min_{a(s),b(s)}\int_0^L\frac1{\sqrt{b(s)}}\mathrm{d}s mina(s),b(s)∫0Lb(s)1ds是我们优化的目标函数,即时间最短, b ( s ) ≥ 0 b(s)\geq0 b(s)≥0用于确保s关于t的变化率的平方是非负的, b ′ ( s ) = 2 a ( s ) b^{\prime}(s)=2a(s) b′(s)=2a(s)是前面推导出其满足的物理关系式, ∥ q ′ ( s ) b ( s ) ∥ ∞ ≤ v m a x \left\|\color{black}{q^{\prime}(s)}\sqrt{b(s)}\right\|_\infty\leq\color{black}{v_{max}} q′(s)b(s) ∞≤vmax即任意弧长在s处的速度要满足动力学约束,同理 ∥ q ′ ′ ( s ) b ( s ) + q ′ ( s ) a ( s ) ∥ ∞ ≤ a m a x \left\|q^{\prime\prime}(s)b(s)+q^{\prime}(s)a(s)\right\|_\infty\leq a_{max} ∥q′′(s)b(s)+q′(s)a(s)∥∞≤amax任意弧长在s处的加速度要满足动力学约束, b ( 0 ) = b 0 , b ( L ) = b L b(0)=\color{black}{b_0},b(L)=\color{black}{b_L} b(0)=b0,b(L)=bL是让s对t变化率的平方在开始和结束时的值是我们人为给定的。
此外,上式中的蓝色部分都是已知的常数,我们要求的优化变量是a(s)和b(s)这两个凸函数,也即以函数为优化变量的凸问题。

以函数为优化变量的凸问题,在计算机里面不能处理连续时间的问题,我们需要对其进行离散化,即把路径分割成若干段小路径,在每段小路径上, a i a^i ai是一个常数, b i b^i bi是一个线性的函数,如下图所示

离散化后的数学表达式如下所示:
∫ 0 L 1 b ( s ) d s ⇔ ∑ k = 0 K − 1 2 ( s k + 1 − s k ) b k + 1 + b k b ( s ) ≥ 0 , ∀ s ∈ [ 0 , L ] ⇔ b k ≥ 0 , 0 ≤ k ≤ K b ′ ( s ) = 2 a ( s ) , ∀ s ∈ [ 0 , L ] ⇔ b k + 1 − b k s k + 1 − s k = 2 a k , 0 ≤ k ≤ K ∣ q ′ ( s ) b ( s ) ∥ ∞ ≤ v m a x , ∀ s ∈ [ 0 , L ] ⇔ ∥ q ′ ( s k ) b k ∥ ∞ ≤ v m a x , 0 ≤ k ≤ K ∥ q ′ ′ ( s ) b ( s ) + q ′ ( s ) a ( s ) ∥ ∞ ≤ a m a x , ∀ s ∈ [ 0 , L ] ⇔ ∥ q ′ ′ ( s k ) b k + q ′ ( s k ) a k ∥ ∞ ≤ a m a x , 0 ≤ k ≤ K \begin{aligned} \int_{0}^{L}\frac{1}{\sqrt{b(s)}}\mathrm{d}s& \Leftrightarrow\sum_{k=0}^{K-1}\frac{2(s^{k+1}-s^k)}{\sqrt{b^{k+1}}+\sqrt{b^k}} \\ b(s)\geq0,\forall s\in[0,L]& \Leftrightarrow b^k\geq0,0\leq k\leq K \\ b^{\prime}(s)=2a(s),\forall s\in[0,L]& \Leftrightarrow\frac{b^{k+1}-b^k}{s^{k+1}-s^k}=2a^k,0\leq k\leq K \\ \left|q^{\prime}(s)\sqrt{b(s)}\right\Vert_{\infty}\leq v_{max},\forall s\in[0,L]& \Leftrightarrow\left\|q^{\prime}(s^k)\sqrt{b^k}\right\|_\infty\leq v_{max},0\leq k\leq K \\ \left\|q^{\prime\prime}(s)b(s)+q^{\prime}(s)a(s)\right\|_{\infty}\leq a_{max},\forall s\in[0,L]& \Leftrightarrow\left\|q^{\prime\prime}(s^k)b^k+q^{\prime}(s^k)a^k\right\|_\infty\leq a_{max},0\leq k\leq K \end{aligned} ∫0Lb(s)1dsb(s)≥0,∀s∈[0,L]b′(s)=2a(s),∀s∈[0,L] q′(s)b(s) ∞≤vmax,∀s∈[0,L]∥q′′(s)b(s)+q′(s)a(s)∥∞≤amax,∀s∈[0,L]⇔k=0∑K−1bk+1+bk2(sk+1−sk)⇔bk≥0,0≤k≤K⇔sk+1−skbk+1−bk=2ak,0≤k≤K⇔ q′(sk)bk ∞≤vmax,0≤k≤K⇔ q′′(sk)bk+q′(sk)ak ∞≤amax,0≤k≤K
我们现在已经把以函数为优化变量的凸优化转换成了以离散序列 a 0 a^0 a0 ~ a k − 1 a^{k-1} ak−1、 b 0 b^0 b0 ~ b k − 1 b^{k-1} bk−1为优化变量的优化问题,其约束都是线性的等式或不等式。
min a k , b k ∑ k = 0 K − 1 2 ( s k + 1 − s k ) b k + 1 + b k \min_{a^k,b^k}\boxed{\sum_{k=0}^{K-1}\frac{2(s^{k+1}-s^k)}{\sqrt{b^{k+1}}+\sqrt{b^k}}} ak,bkmink=0∑K−1bk+1+bk2(sk+1−sk)
b k ≥ 0 , 0 ≤ k ≤ K b k + 1 − b k = 2 ( s k + 1 − s k ) a k , 0 ≤ k ≤ K ∥ q ′ ( s k ) b k ∥ ∞ ≤ v m a x , 0 ≤ k ≤ K ∥ q ′ ′ ( s k ) b k + q ′ ( s k ) a k ∥ ∞ ≤ a m a x , 0 ≤ k ≤ K \begin{aligned}&b^k\geq0,\quad&0\leq k\leq K\\&b^{k+1}-b^k=2(s^{k+1}-s^k)a^k,\quad&0\leq k\leq K\\&\left\|q^{\prime}(s^k)\sqrt{b^k}\right\|_\infty\leq v_{max},\quad&0\leq k\leq K\\&\left\|q^{\prime\prime}(s^k)b^k+q^{\prime}(s^k)a^k\right\|_\infty\leq a_{max},\quad&0\leq k\leq K\end{aligned} bk≥0,bk+1−bk=2(sk+1−sk)ak, q′(sk)bk ∞≤vmax, q′′(sk)bk+q′(sk)ak ∞≤amax,0≤k≤K0≤k≤K0≤k≤K0≤k≤K
b ( 0 ) = b 0 , b ( L ) = b L . b(0)=b_0,~b(L)=b_L. b(0)=b0, b(L)=bL.
那么。我们如何将以上问题转化为锥规划问题呢?可以对优化的目标函数进行如下的转换:


至此,我们得到了该问题的SOCP形式如下:
min a k , b k , c k , d k ∑ k = 0 K − 1 2 ( s k + 1 − s k ) d k ∥ 2 c k + 1 + c k − d k ∥ 2 ≤ c k + 1 + c k + d k , 0 ≤ k ≤ K − 1 ∥ 2 c k b k − 1 ∥ 2 ≤ b k + 1 , 0 ≤ k ≤ K . \begin{aligned}&\min_{a^k,b^k,c^k,d^k}\sum_{k=0}^{K-1}2(s^{k+1}-s^k)d^k\\&\begin{Vmatrix}2\\c^{k+1}+c^k-d^k\end{Vmatrix}_2\leq c^{k+1}+c^k+d^k,\quad0\leq k\leq K-1\\\\&\left\|\begin{array}{c}2c^k\\b^k-1\end{array}\right\|_2\leq b^k+1,\quad&0\leq k\leq K.\end{aligned} ak,bk,ck,dkmink=0∑K−12(sk+1−sk)dk 2ck+1+ck−dk 2≤ck+1+ck+dk,0≤k≤K−1 2ckbk−1 2≤bk+1,0≤k≤K.
b k ≥ 0 , 0 ≤ k ≤ K b k + 1 − b k = 2 ( s k + 1 − s k ) a k , 0 ≤ k ≤ K ∥ q ′ ( s k ) b k ∥ ∞ ≤ v m a x , 0 ≤ k ≤ K ∥ q ′ ′ ( s k ) b k + q ′ ( s k ) a k ∥ ∞ ≤ a m a x , 0 ≤ k ≤ K \begin{aligned}&b^k\geq0,\quad&0\leq k\leq K\\&b^{k+1}-b^k=2(s^{k+1}-s^k)a^k,\quad&0\leq k\leq K\\&\left\|q^{\prime}(s^k)\sqrt{b^k}\right\|_\infty\leq v_{max},\quad&0\leq k\leq K\\&\left\|q^{\prime\prime}(s^k)b^k+q^{\prime}(s^k)a^k\right\|_\infty\leq a_{max},\quad&0\leq k\leq K\end{aligned} bk≥0,bk+1−bk=2(sk+1−sk)ak, q′(sk)bk ∞≤vmax, q′′(sk)bk+q′(sk)ak ∞≤amax,0≤k≤K0≤k≤K0≤k≤K0≤k≤K
b ( 0 ) = b 0 , b ( L ) = b L . b(0)=b_0,~b(L)=b_L. b(0)=b0, b(L)=bL.
–
–
–
参考资料:
1、数值最优化方法(高立 编著)
2、机器人中的数值优化