IO进程基本操作
IO进程学习概述
- 概述
- 缓存机制
- 标准IO
-
- 打开文件
- 读写文件
-
- cat
- 每次一行地读写文件
-
- wc -l
- 文件定位操作
- 文件IO
-
- 打开文件
- 读写文件
-
- cp命令的实现
- 文件定位操作
- 文件属性的获取
- 目录操作
- 库
-
- 分类
- 进程
-
- 进程状态切换图
- 创建进程
- 获取进程号
- 结束进程
- 回收进程资源
- 创建守护进程
- 线程
-
- 创建线程
- 线程退出
- 线程回收&线程取消
- 获取线程tid号
- 线程同步
-
- 信号量初始化&pv操作
- 线程互斥
- 死锁
-
- 线程条件变量的控制
- 进程间通信
-
- 无名管道
-
- 创建无名管道
- 有名管道
-
- 创建有名管道
- 信号
-
- 信号的响应方式
- 信号处理接口
-
- 司机与售票员信号处理
- 共享内存
概述
IO进程主打的就是文件之间的通信,希望本文有你需要的内容。
缓存机制
- 全缓存:与文件相关
刷新缓存的条件:程序正常退出时刷新,缓存区满刷新,强制刷新 - 行缓存:与终端相关
刷新缓存的条件:\n刷新,程序正常退出时刷新,缓存区满刷新,强制刷新:fflush() - 不缓存:没有缓存区(stderr)
标准IO
IO:input/output,针对于文件输入输出。
linux下文件类型:
b(块设备) c(字符设备) d(目录) -(普通文件) l(链接文件) s(套接字) p(管道)
- 概念:在C库中定义的一组专门用于输入输出的函数
- 特点:
a. 标准IO通过缓冲机制减少系统调用的次数,提高效率
b. 标准IO围绕流进行操作,流用FILE *描述;(FILE 就是一个结构体,用于存放操作文件的相关信息,它在stdio.h文件中定义;vi -t FILE,ctags,ctrl+]:代码追踪,ctrl+t:回退)
c. 标准IO默认打开了三个流,stdin(标准输入)、stdout(标准输出)、stderr(标准出错)(FILE *stdin)
打开文件
FILE *fopen(const char *path, const char *mode)
功能:打开文件
参数:
path:打开的文件
mode:打开的方式
r:只读,当文件不存在时报错,文件流定位到文件开头
r+:可读可写,当文件不存在时报错,文件流定位到文件开头
w:只写,文件不存在创建,存在清空
w+:可读可写,文件不存在创建,存在清空
a:追加(在末尾写),文件不存在创建,存在追加,文件流定位到文件末尾
a+:读和追加,文件不存在创建,存在追加,文件流定位到文件末尾
注:当a的方式打开文件时,写只能在末尾进行追加,定位操作
是无法改变写的位置,但是可以改变读的位置
返回值: 成功:文件流
失败:NULL,并且会设置错误码
FILE * freopen(const char *pathname, const char *mode, FILE* fp)
功能:将指定的文件流重定向到打开的文件中
参数:path:文件路径
mode:打开文件的方式(同fopen)
fp:文件流指针
返回值:成功:返回文件流指针
失败:NULL
读写文件
int fgetc(FILE * stream)
功能:从文件中读取一个字符
参数:stream:文件流
返回值:成功:读到的字符
失败或读到文件末尾:EOF(-1)
int fputc(int c, FILE * stream)
功能:向文件中写入一个字符
参数:c:要写的字符
stream:文件流
返回值:成功:写的字符的ASCII
失败:EOF
size_t fread(void *ptr, size_t size, size_t nmemb, FILE *stream);
功能:从文件流读取多个元素
参数: ptr :用来存放读取元素
size :元素大小 sizeof(数据类型)
nmemb :读取元素的个数
stream :要读取的文件
返回值:成功:读取的元素的个数;
读到文件尾: 0
失败: -1
size_t fwrite(const void *ptr, size_t size, size_t nmemb, FILE *stream);
功能:按对象写
参数:同上
返回值:成功:写的元素个数
失败 :-1
由这两个函数,可以实现cat命令
cat
#include 每次一行地读写文件
char * fgets(char *s, int size, FILE * stream);
功能:从文件中每次读取一行字符串
参数:s:存放字符串的地址
size:一次读取的字符个数
stream:文件流
返回值:成功:s的地址
失败或读到文件末尾:NULL
特性:每次实际读取的字符个数为size-1个,会在末尾自动添加\0
int fputs(const char *s, FILE * stream);
功能:向文件中写字符串
参数:s:要写的内容
stream:文件流
返回值:成功:非负整数
失败:EOF
wc -l
fgets每次读取的数据特点是,读完这一行所有的内容,在字符串末尾添加一个\0,再读下一行的内容。但有时文件一行的字符个数大于读取的size个数,fgets也会读取size-1个,然后在末尾添加\0,这一行剩下的内容交给下一次读。这就导致计算文件行数,不能简单地每执行一次fgets行数就加1,还需要确定读的这一行倒数第二个字符是不是\n。
#include 文件定位操作
void rewind(FILE *stream);
功能:将文件位置指针定位到起始位置
int fseek(FILE *stream, long offset, int whence);
功能:文件的定位操作
参数:stream:文件流
offset:偏移量:正数表示向后文件尾部偏移
负数表示向文件开头偏移
whence:相对位置:
SEEK_SET:相对于文件开头
SEEK_CUR:相对于文件当前位置
SEEK_END:相对于文件末尾
返回值:成功:0
失败:-1
long ftell(FILE *stream);
功能:获取当前的文件位置
参数:要检测的文件流
返回值:成功:当前的文件位置,出错:-1
文件IO
- 概念:由系统提供的一组用于输入输出的函数接口
- 特点:
a. 没有缓冲机制,每次访问都要经过系统调用(系统向上提供的一组接口)
b. 围绕文件描述符进行操作,文件描述符是非负整数(>=0),依次加1进行分配
c. 文件IO默认打开三个描述符:0(标准输入)、1(标准输出)、2(标准出错)
d. 可以操作-、b、c、p、s、l类型的文件
打开文件
int open(const char *pathname, int flags);
功能:打开文件
参数:pathname:文件路径名
flags:打开文件的方式
O_RDONLY:只读
O_WRONLY:只写
O_RDWR:可读可写
O_CREAT:创建
O_TRUNC:清空
O_APPEND:追加
返回值:成功:文件描述符
失败:-1
当第二个参数中有O_CREAT选项时,需要给open函数传递第三个参数
指定创建文件的权限
int open(const char *pathname, int flags, mode_t mode);
创建出来的文件权限为指定权限值&(~umask)默认为0002,可以用八进制的数修改
umask 0000
读写文件
ssize_t read(int fd, void *buf, size_t count);
功能:从一个已打开的可读文件中读取数据
参数:fd 文件描述符
buf 存放位置
count 期望的个数
返回值:成功:实际读到的个数
返回-1:表示出错,并设置errno号
返回0:表示读到文件结尾
ssize_t write(int fd, const void *buf, size_t count);
功能:向指定文件描述符中,写入 count个字节的数据。
参数:fd 文件描述符
buf 要写的内容
count 期望值
返回值:成功:实际写入数据的个数
失败 : -1
cp命令的实现
#include \n" , argv[0]);
return -1;
}
//1.打开文件(源文件、目标文件)
fd_src = open(argv[1], O_RDONLY);
if(fd_src < 0)
{
perror("open src file err");
return -1;
}
fd_dest = open(argv[2], O_WRONLY|O_CREAT|O_TRUNC, 0666);
if(fd_dest < 0)
{
perror("open dest file err");
return -1;
}
//2.循环读源文件,写目标文件
while((s = read(fd_src, buf, 32)) > 0)
{
write(fd_dest, buf, s);
}
//3.关闭文件
close(fd_src);
close(fd_dest);
return 0;
}
文件定位操作
off_t lseek(int fd, off_t offset, int whence);
功能:设定文件的偏移位置
参数:fd:文件描述符
offset偏移量
正数:向文件结尾位置移动
负数:向文件开始位置
whence 相对位置
SEEK_SET 开始位置
SEEK_CUR 当前位置
SEEK_END 结尾位置
返回值:成功:文件的当前位置
失败:-1
文件属性的获取
int stat(const char *path, struct stat *buf);
功能:获取文件属性
参数:path:文件路径名
buf:保存文件属性信息的结构体
返回值:成功:0
失败:-1
struct stat {
ino_t st_ino; /* inode号 */
mode_t st_mode; /* 权限 */
nlink_t st_nlink; /* 硬链接数 */
uid_t st_uid; /* 用户ID */
gid_t st_gid; /* 组ID */
off_t st_size; /* 大小 */
time_t st_atime; /* 最后访问时间 */
time_t st_mtime; /* 最后修改时间 */
time_t st_ctime; /* 最后状态改变时间 */
};
目录操作
DIR *opendir(const char *name);
功能:获得目录流
参数:要打开的目录
返回值:成功:目录流
失败:NULL
struct dirent *readdir(DIR *dirp);
功能:读目录
参数:要读的目录流
返回值:成功:读到的信息
失败:NULL
返回值为结构体,该结构体成员为描述该目录下的文件信息
struct dirent {
ino_t d_ino; /* 索引节点号*/
off_t d_off; /*在目录文件中的偏移*/
unsigned short d_reclen; /* 文件名长度*/
unsigned char d_type; /* 文件类型 */
char d_name[256]; /* 文件名 */
};
int closedir(DIR *dirp);
功能:关闭目录
参数:dirp:目录流
库
当使用别人的函数时除了包含头文件以外还要有库
头文件:函数声明、结构体等类型定义、头文件、宏定义
库:就是把一些常用函数的目标文件打包在一起,提供相应函数的接口,便于程序员使用;本质上来说库是一种可执行代码的二进制形式
由于windows和linux的本质不同,因此二者库的二进制是不兼容的
分类
静态库和共享库(动态库)
区别
1) 静态库在程序编译时会被连接到目标代码中。
优点:程序运行时将不再需要该静态库;运行时无需加载库,运行速度更快
缺点:静态库中的代码复制到了程序中,因此体积较大;静态库升级后,程序需要重新编译链接
2) 动态库是在程序运行时才被载入代码中。
优点:程序在执行时加载动态库,代码体积小;将一些程序升级变得简单;不同的应用程序如果调用相同的库,那么在内存里只需要有一份该共享库的实例。
缺点:运行时还需要动态库的存在,移植性较差
静态库
1-将源文件编译生成目标文件
gcc -c add.c -o add.o
2-创建静态库用ar命令,它将很多.o转换成.a
ar crs libmyadd.a add.o
静态库文件名的命名规范是以lib为前缀,紧接着跟静态库名
扩展名为.a
3-测试使用静态库:
gcc main.c -L. -lmyadd // -L指定库的路径
执行./a.out
动态库
1-我们用gcc来创建共享库
gcc -fPIC -c hello.c -o hello.o
-fPIC 创建与地址无关的编译程序
gcc -shared -o libmyhello.so hello.o
2-测试动态库使用
gcc main.c -L. -lmyhello
可以正常编译通过,但是运行时报错./a.out: error while loading shared libraries: libmyadd.so: cannot open shared object file: No such file or directory
原因:当加载动态库时,系统会默认从/lib或/usr/lib路径下查找
解决方法(有三种):
(1)把库拷贝到/usr/lib和/lib目录下。(此方法编译时不需要指定库的路径)
(2)在LD_LIBRARY_PATH环境变量中加上库所在路径。
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:. 后跟动态库的路径
(终端关闭,环境变量就没在了)
(3) 添加/etc/ld.so.conf.d/*.conf文件。
把库所在的路径加到文件末尾,并执行ldconfig刷新
sudo vi xx.conf
添加动态库存在的路径,如:
/home/22061/day3/dynamiclib
进程
进程是一个独立的可调度的任务
进程是动态的,是程序的一次执行过程,包含创建、调度、执行、消亡
特点:
系统会为每一个进程分配0-4g的虚拟空间,0-3g(用户空间)是每个进程所独有的,3g-4g(内核空间)是所有进程共有的。
CPU调度进程时会给进程分配时间片(几毫秒~十几毫秒),当时间片用完后,cpu再进行其他进程的调度,实现进程的轮转,从而实现多任务的操作
进程段:
Linux中的进程包含三个段:
“数据段”存放的是全局变量、常数以及动态数据分配的数据空间(如malloc函数取得的空间)等。
“正文段”存放的是程序中的代码
“堆栈段”存放的是函数的返回地址、函数的参数以及程序中的局部变量
进程分类:
交互进程:该类进程是由shell控制和运行的。交互进程既可以在前台运行,也可以在后台运行。该类进程经常与用户进行交互,需要等待用户的输入,当接收到用户的输入后,该类进程会立刻响应,典型的交互式进程有:shell命令进程、文本编辑器等
批处理进程:该类进程不属于某个终端,它被提交到一个队列中以便顺序执行。
守护进程:该类进程在后台运行。它一般在Linux启动时开始执行,系统关闭时才结束。
进程状态:
1)运行态(TASK_RUNNING):R
指正在被CPU运行或者就绪的状态。这样的进程被成为runnning进程。
2)睡眠态(等待态):
可中断睡眠态(TASK_INTERRUPTIBLE)S:处于等待状态中的进程,一旦被该进程等待的资源被释放,那么该进程就会进入运行状态。
不可中断睡眠态(TASK_UNINTERRUPTIBLE)D:该状态的进程只能用wake_up()函数唤醒。
3)暂停态(TASK_STOPPED):T
当进程收到信号SIGSTOP、SIGTSTP、SIGTTIN或SIGTTOU时就会进入暂停状态。可向其发送SIGCONT信号让进程转换到可运行状态。
4)死亡态:进程结束 X
5)僵尸态:Z
当进程已经终止运行,但还占用系统资源,要避免僵尸态的产生
进程状态切换图
进程创建后,进程进入就绪态,当CPU调度到此进程时进入运行态,当时间片用完时,此进程会进入就绪态,如果此进程正在执行一些IO操作(阻塞操作)会进入阻塞态,完成IO操作后又可进入就绪态,当进程运行结束即进入结束态。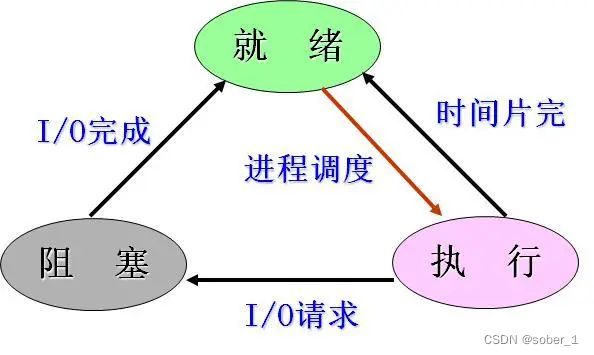
创建进程
pid_t fork(void);
功能:创建子进程
返回值:
成功:在父进程中:返回子进程的进程号 >0
在子进程中:返回值为0
失败:-1并设置errno
特性:
1)子进程几乎拷贝了父进程的全部内容。包括代码、数据
系统数据段中的pc值、栈中的数据、父进程中打开的文件等;但它们的PID
PPID是不同的。
2)父子进程有独立的地址空间,互不影响;当在相应的进程中改变全局变量
静态变量,都互不影响。
3)若父进程先结束,子进程成为孤儿进程,被init进程收养 子进程变成后台进程
4)若子进程先结束,父进程如果没有及时回收,子进程变成僵尸进程
要避免僵尸进程产生
5)fork函数的“写时拷贝”特性,当子进程要修改全局变量值时
会复制父进程的地址空间,如果只是读取变量的值
子进程和父进程访问的是同一个地址空间;
vfork函数先执行子进行再执行父进程,父子进程共享数据段。
获取进程号
pid_t getpid(void);
功能:获取当前进程的进程号
pid_t getppid(void);
功能:获取当前进程的父进程号
结束进程
void exit(int status);
功能:结束进程,刷新缓存
void _exit(int status);
功能:结束进程,不刷新缓存
参数:status是一个整型的参数,可以利用这个参数传递进程结束时的状态。
通常0表示正常结束;
其他的数值表示出现了错误,进程非正常结束
在实际编程时,子进程中调用exit函数,会将参数值(状态)传递给父进程
父进程可以进行相应的处理。
回收进程资源
pid_t wait(int *status);
功能:回收子进程资源(阻塞)
参数:status:子进程退出状态
返回值:成功:回收的子进程的进程号
失败:-1
pid_t waitpid(pid_t pid, int *status, int options);
功能:回收子进程资源
参数:
pid:>0 指定子进程进程号
=-1 任意子进程
=0 等待其组ID等于调用进程的组ID的任一子进程
<-1 等待其组ID等于pid的绝对值的任一子进程
status:子进程退出状态
options:0:阻塞
WNOHANG:非阻塞
返回值:正常:结束的子进程的进程号
当使用选项WNOHANG且没有子进程结束时:0
出错:-1
当子进程退出时会给父进程发送SIGCHLD信号。
创建守护进程
【2】守护进程-掌握
1. 特点:守护进程是后台进程;生命周期比较长,从系统启动时开启
系统关闭时结束;它是脱离控制终端且周期执行的进程。
2. 步骤:
1) 创建子进程,父进程退出
让子进程变成孤儿进程,成为后台进程;fork
2) 在子进程中创建新回话
让子进程成为会话组组长,为了让子进程完全脱离终端;setsid()
3)改变进程运行路径为根目录
原因进程运行的路径不能被删除或卸载;chdir()
4)重设文件权限掩码
目的:增大进程创建文件时权限,提高灵活性;umask()
5)关闭文件描述符
将不需要的文件关闭;close()
线程
是一个轻量级的进程,为了提高系统的性能引入线程,Linux里同样用task_struct来描述一个线程。
线程和进程都参与统一的调度。
在同一个进程中创建的线程共享该进程的地址空间。
进程和线程区别:
共性:都为操作系统提供了并发执行能力
不同点:
调度和资源:线程是系统调度的最小单位,进程是资源分配的最小单位
地址空间方面:同一个进程创建的多个线程共享进程的资源;进程的地址空间相互独立
通信方面:线程通信相对简单,只需要通过全局变量可以实现,但是需要考虑临界资源访问的问题;进程通信比较复杂,需要借助进程间的通信机制(借助3g-4g内核空间)
安全性方面:线程安全性差一些,当进程结束时会导致所有线程退出;进程相对安全
线程资源:
共享的资源:可执行的指令、静态数据、进程中打开的文件描述符、信号处理函数、当前工作目录、用户ID、用户组ID
私有的资源:线程ID (TID)、PC(程序计数器)和相关寄存器、堆栈、错误号 (errno)、信号掩码和优先级、执行状态和属性
创建线程
int pthread_create(pthread_t *thread, const pthread_attr_t *attr,
void *(*start_routine) (void *), void *arg);
功能:创建线程
参数:thread:线程标识
attr:线程属性, NULL:代表设置默认属性
start_routine:函数名:代表线程函数
arg:用来给前面函数传参
返回值:成功:0
失败:错误码
线程退出
int pthread_exit(void *value_ptr)
功能:用于退出线程的执行
参数:value_ptr:线程退出时返回的值
返回值:成功 : 0
失败:errno
线程回收&线程取消
int pthread_join(pthread_t thread, void **value_ptr)
功能:用于等待一个指定的线程结束
参数:thread:创建的线程对象
value_ptr:指针*value_ptr指向线程返回的参数
返回值:成功 : 0
失败:errno
int pthread_detach(pthread_t thread);
功能:让线程分离,让线程结束时自动回收线程资源
参数:thread:线程ID
int pthread_cancel(pthread_t thread);
功能:取消线程
获取线程tid号
pthread_t pthread_self(void);
功能:获取当前线程的tid
返回值:tid值
线程同步
同步指的是多个任务(线程)按照约定的顺序相互配合完成一件事情
信号量:通过信号量实现同步操作;由信号量来决定线程是继续运行还是阻塞等待
信号量代表某一类资源,其值表示系统中该资源的数量,它是一个受保护的变量,只能通过三种操作来访问:初始化、P操作(申请资源)、V操作(释放资源)其值为非负整数。
信号量初始化&pv操作
int sem_init(sem_t *sem, int pshared, unsigned int value)
功能:初始化信号量
参数:sem:初始化的信号量对象
pshared:信号量共享的范围(0: 线程间使用 非0:1进程间使用)
value:信号量初值
返回值:成功 0
失败 -1
int sem_wait(sem_t *sem)
功能:申请资源 P操作
参数:sem:信号量对象
返回值:成功 0
失败 -1
注:此函数执行过程,先对信号量进行减1,当信号量的值大于等于0时
表示有资源可以用,则继续执行;当信号量的值小于0时
表示没有资源可以使用,函数阻塞
int sem_post(sem_t *sem)
功能:释放资源 V操作
参数:sem:信号量对象
返回值:成功 0
失败 -1
注:释放一次信号量的值加1,函数不阻塞
线程互斥
临界资源:一次仅允许一个进程所使用的资源
临界区:指的是一个访问共享资源的程序片段
互斥:多个线程在访问临界资源时,同一时间只能一个线程访问
互斥锁:通过互斥锁可以实现互斥机制,主要用来保护临界资源,每个临界资源都由一个互斥锁来保护,线程必须先获得互斥锁才能访问临界资源,访问完资源后释放该锁。如果无法获得锁,线程会阻塞直到获得锁为止。
int pthread_mutex_init(pthread_mutex_t *mutex, pthread_mutexattr_t *attr)
功能:初始化互斥锁
参数:mutex:互斥锁
attr: 互斥锁属性 // NULL表示缺省属性
返回值:成功 0
失败 -1
int pthread_mutex_lock(pthread_mutex_t *mutex)
功能:申请互斥锁
参数:mutex:互斥锁
返回值:成功 0
失败 -1
注:和pthread_mutex_trylock区别:
pthread_mutex_lock是阻塞的;
pthread_mutex_trylock不阻塞,如果申请不到锁会立刻返回
int pthread_mutex_unlock(pthread_mutex_t *mutex)
功能:释放互斥锁
参数:mutex:互斥锁
返回值:成功 0
失败 -1
int pthread_mutex_destroy(pthread_mutex_t *mutex)
功能:销毁互斥锁
参数:mutex:互斥锁
死锁
两个或两个以上的进程在执行过程中,由于竞争资源或者由于彼此通信而造成的一种阻塞的现象,若无外力作用,它们都将无法推进下去
死锁产生的四个必要条件:
1、互斥使用 当资源被一个线程使用(占有)时,别的线程不能使用
2、不可抢占 资源请求者不能强制从资源占有者手中夺取资源,资源只能由资源占有者主动释放。
3、请求和保持 当资源请求者在请求其他的资源的同时保持对原有资源的占有。
4、循环等待 存在一个等待队列:P1占有P2的资源,P2占有P3的资源,P3占有P1的资源。这样就形成了一个等待环路。
注意:当上述四个条件都成立的时候,便形成死锁。当然,死锁的情况下如果打破上述任何一个条件,便可让死锁消失。
线程条件变量的控制
int pthread_cond_init(pthread_cond_t *restrict cond,const pthread_condattr_t *restrict attr);
功能:初始化条件变量
参数:cond:是一个指向结构pthread_cond_t的指针
restrict attr:是一个指向结构pthread_condattr_t的指针,
一般设为NULL
返回值:成功:0 失败:非0
int pthread_cond_wait(pthread_cond_t *restrict cond,pthread_mutex_t *restrict mutex);
功能:等待信号的产生
参数:restrict cond:要等待的条件
restrict mutex:对应的锁
返回值:成功:0,失败:不为0
注:当没有条件产生时函数会阻塞,同时会将锁解开;如果等待到条件产生
函数会结束阻塞同时进行上锁。
int pthread_cond_signal(pthread_cond_t *cond);
功能:给条件变量发送信号
参数:cond:条件变量值
返回值:成功:0,失败:非0
注:必须等待pthread_cond_wait函数先执行,再产生条件才可以
此函数和pthread_cond_broadcast区别是:
pthread_cond_broadcast函数相当于是广播,会将所有等待此条件的线程唤醒
pthread_cond_signal只能唤醒单个等待此条件的线程
int pthread_cond_destroy(pthread_cond_t *cond);
功能:将条件变量销毁
参数:cond:条件变量值
返回值:成功:0, 失败:非0
进程间通信
进程间通信方式
1)早期的进程间通信:
无名管道、有名管道、信号
2)systerm V IPC:
共享内存、消息队列、信号灯集
3)BSD:
套接字
无名管道
特点
a. 只能用于具有亲缘关系的进程之间的通信
b. 半双工的通信模式,具有固定的读端和写端
c. 管道可以看成是一种特殊的文件,对于它的读写可以使用文件IO如read、write函数.
d. 管道是基于文件描述符的通信方式。当一个管道建立时,它会创建两个文件描述符
fd[0]和fd[1]。其中fd[0]固定用于读管道,而fd[1]固定用于写管道。
创建无名管道
int pipe(int fd[2])
功能:创建无名管道
参数:文件描述符 fd[0]:读端 fd[1]:写端
返回值:成功 0
失败 -1
注意事项
a. 当管道中无数据时,读操作会阻塞
b. 管道中装满(管道大小64K)数据写阻塞,一旦有4k空间,写继续
c. 只有在管道的读端存在时,向管道中写入数据才有意义。否则,会导致管道破裂,向管道中写入数据的进程将收到内核传来的SIGPIPE信号 (通常Broken pipe错误)。
有名管道
1) 特点
a. 有名管道可以使互不相关的两个进程互相通信。
b. 有名管道可以通过路径名来指出,并且在文件系统中可见,但内容存放在内存中。
c. 进程通过文件IO来操作有名管道
d. 有名管道遵循先进先出规则
e. 不支持如lseek() 操作
创建有名管道
int mkfifo(const char *filename,mode_t mode);
功能:创健有名管道
参数:filename:有名管道文件名
mode:权限
返回值:成功:0
失败:-1,并设置errno号
注意对错误的处理方式:
如果错误是file exist时,注意加判断,如:if(errno == EEXIST)。
函数只是在路径下创建管道文件,往管道中写的数据依然写在内核空间。
注意事项
a. 只写方式,写阻塞,一直到另一个进程把读打开
b. 只读方式,读阻塞,一直到另一个进程把写打开
c. 可读可写,如果管道中没有数据,读阻塞
信号
1.信号是在软件层次上对中断机制的一种模拟,是一种异步通信方式
2.信号可以直接进行用户空间进程和内核进程之间的交互,内核进程也可以利用它来通知用户空间进程发生了哪些系统事件。
3.如果该进程当前并未处于执行态,则该信号就由内核保存起来,直到该进程恢复执行再传递给它;如果一个信号被进程设置为阻塞,则该信号的传递被延迟,直到其阻塞被取消时才被传递给进程。
信号的响应方式
1)忽略信号:对信号不做任何处理,但是有两个信号不能忽略:
即SIGKILL及SIGSTOP。
2)捕捉信号:定义信号处理函数,当信号发生时,执行相应的处理函数。
3)执行缺省操作:Linux对每种信号都规定了默认操作
信号种类
SIGKILL:结束进程,不能被忽略不能被捕捉
SIGSTOP:结束进程,不能被忽略不能被捕捉
SIGCHLD:子进程退出时给父进程发的信号
SIGINT:结束进程,对应快捷方式ctrl+c
SIGTSTP:暂停信号,对应快捷方式ctrl+z
SIGQUIT:退出信号,对应快捷方式ctrl+\
SIGALRM:闹钟信号,alarm函数设置定时,当到设定的时间时
内核会向进程发送此信号结束进程。
SIGTERM:结束终端进程,kill 使用时不加数字默认是此信号
信号处理接口
int kill(pid_t pid, int sig);
功能:信号发送
参数:pid:指定进程
sig:要发送的信号
返回值:成功 0 失败 -1
int raise(int sig);
功能:进程向自己发送信号
参数:sig:信号
返回值:成功 0 失败 -1
unsigned int alarm(unsigned int seconds)
功能:在进程中设置一个定时器
参数:seconds:定时时间,单位为秒
返回值:如果调用此alarm()前,进程中已经设置了闹钟时间,则
返回上一个闹钟时间的剩余时间,否则返回0。
注意:一个进程只能有一个闹钟时间。如果在调用alarm时
已设置过闹钟时间,则之前的闹钟时间被新值所代替
int pause(void);
功能:用于将调用进程挂起,直到收到信号为止。
#include 附上一个挺有意思的练习
司机与售票员信号处理
用信号的知识实现司机和售票员问题。
1)售票员捕捉SIGINT(代表开车)信号,向司机发送SIGUSR1信号,司机打印(let’s gogogo)
2)售票员捕捉SIGQUIT(代表停车)信号,向司机发送SIGUSR2信号,司机打印(stop the bus)
3)司机捕捉SIGTSTP(代表到达终点站)信号,向售票员发送SIGUSR1信号,售票员打印(please get off the bus)
4)司机等待售票员下车,之后司机再下车。
售票员:捕捉:SIGINT SIGQUIT SIGUSR1
忽略:SIGTSTP
司机:捕捉:SIGUSR1 SIGUSR2 SIGTSTP
忽略:SIGINT SIGQUIT
下面是我的实现过程,输出带点个人风格,不影响理解
#include注释处换成pause后,功能一样,但是pause函数可以让程序对CPU的资源占用率极大的降低,这与pause的底层实现逻辑有关,哥们也不懂 qaq。
共享内存
1)共享内存是一种最为高效的进程间通信方式,进程可以直接读写内存,
而不需要任何数据的拷贝
2)为了在多个进程间交换信息,内核专门留出了一块内存区,可以由
需要访问的进程将其映射到自己的私有地址空间
3)进程就可以直接读写这一内存区而不需要进行数据的拷贝,从而大大
提高的效率。
4)由于多个进程共享一段内存,因此也需要依靠某种同步机制
如互斥锁和信号量等
创建共享内存步骤
a. 创建key值
b. 创建或打开共享内存
c. 映射共享内存到用户空间
d. 撤销映射
e. 删除共享内存
key_t ftok(const char *pathname, int proj_id);
功能:产生一个独一无二的key值
参数:
Pathname:已经存在的可访问文件的名字
Proj_id:一个字符(因为只用低8位)
返回值:成功:key值
失败:-1
int shmget(key_t key, size_t size, int shmflg);
功能:创建或打开共享内存
参数:
key 键值
size 共享内存的大小
shmflg IPC_CREAT|IPC_EXCL|0777
返回值:成功 shmid
出错 -1
void *shmat(int shmid,const void *shmaddr,int shmflg);
功能:映射共享内存,即把指定的共享内存映射到进程的地址空间用于访问
参数:
shmid 共享内存的id号
shmaddr 一般为NULL,表示由系统自动完成映射
如果不为NULL,那么有用户指定
shmflg:SHM_RDONLY就是对该共享内存只进行读操作
0 可读可写
返回值:成功:完成映射后的地址,
出错:-1的地址
用法:if((p = (char *)shmat(shmid,NULL,0)) == (char *)-1)
int shmdt(const void *shmaddr);
功能:取消映射
参数:要取消的地址
返回值:成功0
失败的-1
int shmctl(int shmid,int cmd,struct shmid_ds *buf);
功能:(删除共享内存),对共享内存进行各种操作
参数:
shmid 共享内存的id号
cmd IPC_STAT 获得shmid属性信息,存放在第三参数
IPC_SET 设置shmid属性信息,要设置的属性放在第三参数
IPC_RMID:删除共享内存,此时第三个参数为NULL即可
返回: 成功0
失败-1
用法:shmctl(shmid,IPC_RMID,NULL);
系统命令:
ipcs -m : 查看共享内存
ipcrm -m shmid: 删除共享内存