各种排序汇总(C语言实现)
目录
一、直接插入排序
二、希尔排序
三、选择排序
四、堆排序
五、交换排序
5.1 冒泡排序
5.2 快速排序
5.2.1.基础版本
5.2.2.Hoare版本(单趟)
5.2.3. 挖坑法(单趟)
5.2.4. 前后指针法(单趟)
5.2.5. 汇总版本
5.2.6 快速排序的非递归形式
六、归并排序
①递归形式:
②非递归形式:
七、计数排序
八、总结
一、直接插入排序
思路:将需要排序的元素插入到已排好的有序表序列中,从而得到一个完整的有序序列。
我们可以将其过程想象是在从左往右整理扑克牌,碰到比前面序列小的牌就将其往前插入。
上代码:
// 升序
// 最坏:O(N^2) 逆序
// 最好:O(N) 顺序有序
void InsertSort(int* a, int n)
{
for (int i = 1; i < n; i++)
{
int end = i-1;
int tmp = a[i];
// 将tmp插入到[0,end]区间中,保持有序
while (end >= 0) //控制比较次数
{
if (tmp < a[end])
{
a[end + 1] = a[end];
--end;
}
else
{
break;
}
}
a[end + 1] = tmp;
}
}分析:
1、待排序元素比有序元素元素大则直接插入到该有序元素后,若小于有序元素则将该有序元素向后移动。
2、此代码对于相同的元素排序后二者位置不发生交换,因此是稳定的。
二、希尔排序
希尔排序法又称缩小增量法。希尔排序法的基本思想是:先选定一个整数,把待排序文件中所有记录分成个组,所有距离为的记录分在同一组内,并对每一组内的记录进行排序。然后,重复上述分组和排序的工作。当到达=1时,所有记录在统一组内排好序。
可以理解为分组插排,每组排完会更加接近有序。
void ShellSort(int* a, int n)
{
/*int gap = 3;
for (int j = 0; j < gap; j++) //gap为多少就要排几遍
{
for (int i = j; i < n - gap; i += gap)
{
int end = i;
int tmp = a[i + gap];
while (end >= 0)
{
if (tmp < a[end])
{
a[end + gap] = a[end];
end -= gap;
}
else
{
break;
}
}
a[end + gap] = tmp;
}
}*/
// gap > 1 预排序
// gap == 1 直接插入排序
int gap = n;
while (gap > 1)
{
//gap /= 2;
gap = gap / 3 + 1; //+1能使gap保证最后为1
for (int i = 0; i < n - gap; i++)
{
int end = i;
int tmp = a[i + gap];
while (end >= 0)
{
if (tmp < a[end])
{
a[end + gap] = a[end];
end -= gap;
}
else
{
break;
}
}
a[end + gap] = tmp;
}
//PrintArray(a, n);
}
}分析:
-
希尔排序是对直接插入排序的优化。
-
当gap > 1时都是预排序,目的是让数组更接近于有序。当gap == 1时,数组已经接近有序的了,这样就会很快。这样整体而言,可以达到优化的效果。
-
希尔排序是不稳定的。
-
时间复杂度= O(n^1.3)。
三、选择排序
思路:
每一次从待排序的数据元素中选出最小(或最大)的一个元素,存放在序列的起始位置,直到全部待排序的数据元素排完 。
-
在元素集合array[i]--array[n-1]中选择关键码最大(小)的数据元素
-
若它不是这组元素中的最后一个(第一个)元素,则将它与这组元素中的最后一个(第一个)元素交换
-
在剩余的array[i]--array[n-2](array[i+1]--array[n-1])集合中,重复上述步骤,直到集合剩余1个元素
void Swap(int* p1, int* p2)
{
int tmp = *p1;
*p1 = *p2;
*p2 = tmp;
}
// 最坏:O(N^2)
// 最好:O(N^2).
// 10:40继续
void SelectSort(int* a, int n)
{
int left = 0, right = n - 1;
while (left < right)
{
int mini = left, maxi = left;
for (int i = left + 1; i <= right; i++)
{
if (a[i] < a[mini])
{
mini = i;
}
if (a[i] > a[maxi])
{
maxi = i;
}
}
Swap(&a[left], &a[mini]);
// 如果left和maxi重叠,交换后修正一下
// 因为left和maxi重叠,交换之后maxi就跑到mini上了,后续交换的maxi并不是最大值
if (left == maxi)
{
maxi = mini;
}
Swap(&a[right], &a[maxi]);
++left;
--right;
}
}
分析:
-
时间复杂度(最好/最坏):O(N^2)
-
空间复杂度:O(1)
-
稳定性:不稳定
四、堆排序
堆排序(Heapsort)是指利用堆积树(堆)这种数据结构所设计的一种排序算法,它是选择排序的一种。它是通过堆来进行选择数据。需要注意的是排升序要建大堆,排降序建小堆。
// 左右子树都是大堆/小堆
void AdjustDown(int* a, int n, int parent)
{
int child = parent * 2 + 1;
while (child < n)
{
// 选出左右孩子中大的那一个
if (child + 1 < n && a[child + 1] > a[child])
{
++child;
}
if (a[child] > a[parent])
{
Swap(&a[child], &a[parent]);
parent = child;
child = parent * 2 + 1;
}
else
{
break;
}
}
}
void HeapSort(int* a, int n)
{
// 建堆 -- 向下调整建堆 -- O(N)
for (int i = (n - 1 - 1) / 2; i >= 0; --i)
//从最后一个节点的父亲开始,n-1为最后一个叶子结点,-1/2为其父节点
{
AdjustDown(a, n, i);
}
// 自己先实现 -- O(N*logN)
int end = n - 1;
while (end > 0)
{
Swap(&a[end], &a[0]);
AdjustDown(a, end, 0);
--end;
}
}
分析:
-
时间复杂度:O(N*logN)
-
空间复杂度:O(1)
-
稳定性:不稳定
五、交换排序
5.1 冒泡排序
老朋友了,直接上代码
// 最坏:O(N^2)
// 最好:O(N)
void BubbleSort(int* a, int n)
{
for (int j = 0; j < n; j++)
{
bool exchange = false;
//此标志可以判断是否数组本身有序
//如果一趟跑完没有发生交换,则说明数组已经排序好了,直接退出即可
for (int i = 1; i < n-j; i++)
{
if (a[i - 1] > a[i])
{
Swap(&a[i - 1], &a[i]);
exchange = true;
}
}
if (exchange == false)
{
break;
}
}
}分析:
-
时间复杂度:O(N^2)
-
空间复杂度:O(1)
-
稳定性:稳定
5.2 快速排序
思路:选一个关键值,然后分别从左边还有右边向中间逼近,在左边找比关键值大的,在右边找比关键值小的,找到后二者交换,最终在二者相遇时,将相遇的值与关键值交换。
关键值的寻找我们一般使用三数取中法,即在数组前中后位置的三个数选出第二大的数作为关键值
其代码如下:
int GetMidNumi(int* a, int left, int right)
{
int mid = (left + right) / 2;
if (a[left] < a[mid])
{
if (a[mid] < a[right])
{
return mid;
}
else if (a[left] > a[right])
{
return left;
}
else
{
return right;
}
}
else // a[left] > a[mid]
{
if (a[mid] > a[right])
{
return mid;
}
else if (a[left] < a[right])
{
return left;
}
else
{
return right;
}
}
}5.2.1.基础版本
每跑完一趟就会确定一个key的位置
void QuickSort(int* a, int left, int right)
{
// ... 返回条件
int begin = left, end = right;
int keyi = left;
while (left < right)
{
// 右边找小
while (left < right && a[right] >= a[keyi])
--right;
// 左边找大
while (left < right && a[left] <= a[keyi])
++left;
Swap(&a[left], &a[right]);
}
Swap(&a[keyi], &a[left]);
keyi = left;
// [begin, keyi-1] keyi [keyi+1, end]
// 递归
QuickSort(a,begin,keyi-1);
QuickSort(a,keyi+1,end);
}5.2.2.Hoare版本(单趟)
// O(N*logN)
// Hoare
int PartSort1(int* a, int left, int right)
{
// 三数取中
int midi = GetMidNumi(a, left, right);
if (midi != left)
Swap(&a[midi], &a[left]);
int keyi = left;
while (left < right)
{
// 右边找小
while (left < right && a[right] >= a[keyi])
--right;
// 左边找大
while (left < right && a[left] <= a[keyi])
++left;
Swap(&a[left], &a[right]);
}
Swap(&a[keyi], &a[left]);
keyi = left;
// [begin, keyi-1] keyi [keyi+1, end]
// 递归
return keyi;
}5.2.3. 挖坑法(单趟)
// 挖坑法
int PartSort2(int* a, int left, int right)
{
// 三数取中
int midi = GetMidNumi(a, left, right);
if (midi != left)
Swap(&a[midi], &a[left]);
int key = a[left];
int hole = left;
while (left < right)
{
// 右边找小
while (left < right && a[right] >= key)
--right;
a[hole] = a[right];
hole = right;
// 左边找大
while (left < right && a[left] <= key)
++left;
a[hole] = a[left];
hole = left;
}
a[hole] = key;
// [begin, hole-1] keyi [hole+1, end]
// 递归
return hole;
}5.2.4. 前后指针法(单趟)
思路:把比key大的值往右翻,比key小的值往左翻
具体细节:
1.两个指针,初始一个在最前面(prev),另一个跟在它后面(cur),cur找到比key小的值,++prev,cur和prev的位置值交换,++cur
2.cur找到比key大的值,++cur
说明:
1.prev要么紧跟着cur
2.prev和cur中间间隔着比key大的一段值区间
// 前后指针法
int PartSort3(int* a, int left, int right)
{
// 三数取中
int midi = GetMidNumi(a, left, right);
if (midi != left)
Swap(&a[midi], &a[left]);
int keyi = left;
int prev = left;
int cur = left + 1;
while (cur <= right)
{
if (a[cur] < a[keyi] && ++prev != cur)
Swap(&a[cur], &a[prev]);
++cur;
}
Swap(&a[prev], &a[keyi]);
keyi = prev;
return keyi;
}5.2.5. 汇总版本
void QuickSort(int* a, int left, int right)
{
if (left >= right)
return;
/*int keyi1 = PartSort1(a, left, right);
QuickSort(a, left, keyi - 1);
QuickSort(a, keyi+1, right); */
/*int keyi2 = PartSort2(a, left, right);
QuickSort(a, left, keyi - 1);
QuickSort(a, keyi+1, right); */
int keyi3 = PartSort3(a, left, right);
QuickSort(a, left, keyi - 1);
QuickSort(a, keyi+1, right);
}分析:
-
快速排序整体的综合性能和使用场景都是比较好的,所以才敢叫快速排序
-
时间复杂度:O(N*logN)
-
空间复杂度:O(logN)
-
稳定性:不稳定
-
类似前序遍历
快速排序优化:
1.三数取中法取key
2.递归到小区间时,可以考虑使用直接插入排序
5.2.6 快速排序的非递归形式
为什么要将递归改非递归呢?因为递归也是存在一定问题的:
1.效率(影响不是很多)。
2.如果深度太深,会导致栈溢出。
而递归改成非递归的方法有以下两种:
1.直接改成循环,可参考斐波那契数列。
2.使用栈辅助改循环。
思路:
1.将区间放入栈中,右边优先入栈,这样左边就先出栈,符合我们原来的逻辑顺序,类似二叉树的前序遍历。
2.在栈里面取一段区间,进行单趟排序。
3.单趟排完后对其分割的子区间入栈。
4.如果子区间只有一个值或不存在,则不需要入栈。
// 快速排序 非递归实现
void QuickSortNonR(int* a, int left, int right)
{
ST st;
STInit(&st);
STPush(&st, right); //右边先入栈,这样左边的区间就先出栈
STPush(&st, left);
while (!STEmpty(&st))
{
int begin = STTop(&st);
STPop(&st);
int end = STTop(&st);
STPop(&st);
int keyi = PartSort3(a, begin, end);
//排序完在对其分割后的子区间排序
if (keyi + 1 < end) //区间长度大于2再进行入栈,否则就不用排了
{
STPush(&st, end);
STPush(&st, keyi+1);
}
if (begin < keyi -1 ) //区间长度大于2再进行入栈,否则就不用排了
{
STPush(&st, keyi-1);
STPush(&st, begin);
}
}
STDestroy(&st);
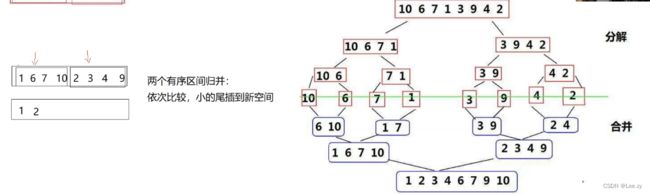
}六、归并排序
思路:分治法,将区间不断划分为二,划分到一再往回进行有序合并,归并的前提:两段区间有序。归并到一个新数组,再拷贝到原来的数组。
①递归形式:
void _MergeSort(int* a, int begin, int end, int* tmp)
{
if (begin >= end)
return;
int mid = (begin + end) / 2;
//[begin, mid] [mid+1,end],子区间递归排序
_MergeSort(a, begin, mid, tmp);
_MergeSort(a, mid+1, end, tmp);
memcpy(a+begin,tmp+begin, sizeof(int) * (end - begin + 1));
}
void MergeSort(int* a, int n)
{
int* tmp = (int*)malloc(sizeof(int) * n);
if (tmp == NULL)
{
perror("malloc fail\n");
return;
}
_MergeSort(a,0,n-1,tmp);
free(tmp);
}②非递归形式:
思路:类似后序,直接借用循环,但是要考虑偶数还是奇数个数,若为奇数,需要进行修正
gap是归并过程中每组的数据个数
//非递归版本
void MergeSortNonR(int* a, int n)
{
int* tmp = (int*)malloc(sizeof(int) * n);
if (tmp == NULL)
{
perror("malloc fail\n");
return;
}
int gap = 1;
while (gap < n)
{
for (int i = 0; i < n; i += 2 * gap)
{
// [begin1,end1][begin2, end2]
int begin1 = i, end1 = i + gap - 1;
int begin2 = i + gap, end2 = i + 2 * gap - 1;
//奇数情况需要修正
if (end1 >= n || begin2 >= n)
{
break;
}
if (end2 >= n)
{
end2 = n - 1;
}
//printf("[%d,%d][%d,%d] ", begin1, end1, begin2, end2);
int j = i;
while (begin1 <= end1 && begin2 <= end2)
{
if (a[begin1] < a[begin2])
{
tmp[j++] = a[begin1++];
}
else
{
tmp[j++] = a[begin2++];
}
}
while (begin1 <= end1)
{
tmp[j++] = a[begin1++];
}
while (begin2 <= end2)
{
tmp[j++] = a[begin2++];
}
// 归并一部门拷贝一部分
memcpy(a + i, tmp + i, sizeof(int) * (end2 - i + 1));
}
printf("\n");
gap *= 2;
}
free(tmp);
}分析:
-
归并的缺点在于需要O(N)的空间复杂度,归并排序的思考更多的是解决在磁盘中的外排序问题。
-
时间复杂度:O(N*logN)
-
空间复杂度:O(N)
-
稳定性:稳定
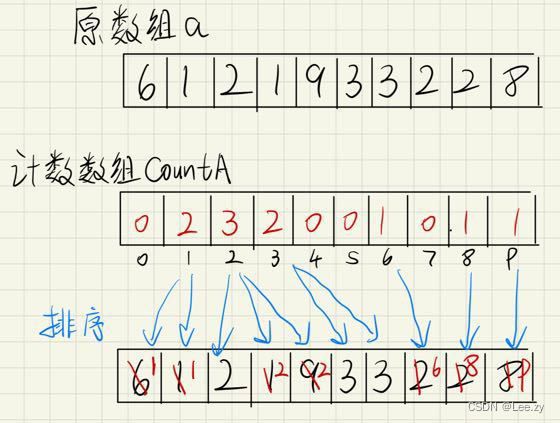
七、计数排序
思路:
1、统计每个数据出现的次数
2、根据次数从头开始排序
void CountSort(int* a, int n)
{
int max = a[0];
int min = a[0];
//找到最大值和最小值以确定范围
for (int i = 1; i < n; ++i)
{
if (a[i] > max)
max = a[i];
if (a[i] < min)
min = a[i];
}
int range = max - min + 1;
int* countA = (int*)malloc(sizeof(int) * range);
if (countA == NULL)
{
perror("malloc fail\n");
}
//计数
for (int i = 0; i < n; i++)
{
//相对位置映射计数
countA[a[i] - min]++;
}
//排序
int j = 0;
for (int i = 0; i < range; i++)
{
while (countA[i]--)
{
a[j++] = i + min;
}
}
free(countA);
}分析:
-
计数排序适合对数据范围集中且范围不大的整形数组排序,不适合范围分散或者非整型的排序,如字符串、浮点数,是一种小众排序;
-
时间复杂度:O(MAX(N,范围));
-
空间复杂度:O(范围);
-
稳定性:稳定;
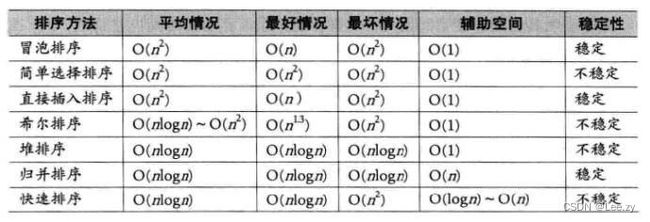
八、总结