基于绯鲵鲣算法实现栅格地图机器人路径规划附matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
个人主页:Matlab科研工作室
个人信条:格物致知。
更多Matlab仿真内容点击
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
⛄ 内容介绍
路径规划是机器人领域中的一个重要问题,它涉及到如何使机器人在给定的环境中找到一条最优的路径。机器人路径规划算法是一种用于确定机器人在给定环境中移动的最佳路径的方法。在这个领域中,有许多不同的算法可以用于解决路径规划问题,其中一种被广泛应用的算法是基于绯鲵鲣算法的机器人路径规划算法。
绯鲵鲣算法是一种基于自然界中鲵鲣鱼群体行为的优化算法。鲵鲣鱼是一种能够在复杂水域中自由移动的鱼类,它们通过观察周围环境中的信息来确定自己的移动方向。基于这种行为,绯鲵鲣算法模拟了鲵鲣鱼在水域中的移动过程,并利用这种模拟来解决路径规划问题。
在基于绯鲵鲣算法的机器人路径规划算法中,首先需要建立一个合适的环境模型。这个模型可以是一个二维或三维的网格,其中包含了机器人可能移动的所有位置。然后,通过在这个环境模型中引入一些障碍物,可以模拟出机器人在真实环境中可能遇到的障碍物。
接下来,算法通过初始化一群绯鲵鲣鱼来开始路径规划过程。每个绯鲵鲣鱼都代表着一个可能的路径解,它们的位置在环境模型中随机分布。然后,算法根据每个绯鲵鲣鱼的位置和周围环境的信息,计算出它们的适应度值。适应度值可以用来评估每个绯鲵鲣鱼的路径解的质量,从而确定它们在下一次迭代中的移动方向。
在每次迭代中,绯鲵鲣鱼根据它们的适应度值和周围环境的信息来更新自己的位置。更新的过程可以通过一些规则来确定,例如,绯鲵鲣鱼可以选择朝着适应度值更高的方向移动,或者根据周围环境的信息来调整自己的移动方向。通过不断迭代更新,绯鲵鲣鱼最终会找到一条最优的路径解,这条路径解可以作为机器人的最佳移动路径。
基于绯鲵鲣算法的机器人路径规划算法具有许多优点。首先,它可以在复杂的环境中找到最优的路径解,这对于机器人在现实世界中的导航非常重要。其次,算法的运行速度相对较快,可以在短时间内找到最佳路径。此外,算法的实现相对简单,容易理解和调整。
然而,基于绯鲵鲣算法的机器人路径规划算法也存在一些局限性。首先,算法的性能受到环境模型的影响,如果环境模型不准确或不完整,算法可能无法找到最优的路径解。其次,算法的收敛速度可能较慢,特别是在复杂的环境中,可能需要大量的迭代次数才能找到最佳路径。
综上所述,基于绯鲵鲣算法的机器人路径规划算法是一种有效的方法,可以用于解决机器人在给定环境中移动的最佳路径问题。虽然算法存在一些局限性,但它的优点远远超过了缺点。随着技术的不断发展,相信这种算法在机器人领域中将发挥越来越重要的作用,并为实现智能机器人的目标做出重要贡献。
室内环境栅格法建模步骤
1.栅格粒大小的选取
栅格的大小是个关键因素,栅格选的小,环境分辨率较大,环境信息存储量大,决策速度慢。
栅格选的大,环境分辨率较小,环境信息存储量小,决策速度快,但在密集障碍物环境中发现路径的能力较弱。
2.障碍物栅格确定
当机器人新进入一个环境时,它是不知道室内障碍物信息的,这就需要机器人能够遍历整个环境,检测障碍物的位置,并根据障碍物位置找到对应栅格地图中的序号值,并对相应的栅格值进行修改。自由栅格为不包含障碍物的栅格赋值为0,障碍物栅格为包含障碍物的栅格赋值为1.
3.未知环境的栅格地图的建立
通常把终点设置为一个不能到达的点,比如(-1,-1),同时机器人在寻路过程中遵循“下右上左”的原则,即机器人先向下行走,当机器人前方遇到障碍物时,机器人转向右走,遵循这样的规则,机器人最终可以搜索出所有的可行路径,并且机器人最终将返回起始点。
备注:在栅格地图上,有这么一条原则,障碍物的大小永远等于n个栅格的大小,不会出现半个栅格这样的情况。
目标函数设定
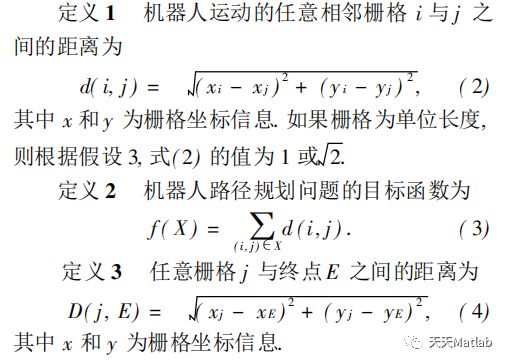
⛄ 部分代码
function drawPath(path,G,flag)%%%%xGrid=size(G,2);drawShanGe(G,flag)hold onset(gca,'XtickLabel','')set(gca,'YtickLabel','')L=size(path,1);Sx=path(1,1)-0.5;Sy=path(1,2)-0.5;plot(Sx,Sy,'ro','MarkerSize',5,'LineWidth',5); % 起点for i=1:L-1plot([path(i,2) path(i+1,2)]-0.5,[path(i,1) path(i+1,1)]-0.5,'k-','LineWidth',1.5,'markersize',10)hold onendEx=path(end,1)-0.5;Ey=path(end,2)-0.5;plot(Ex,Ey,'gs','MarkerSize',5,'LineWidth',5); % 终点
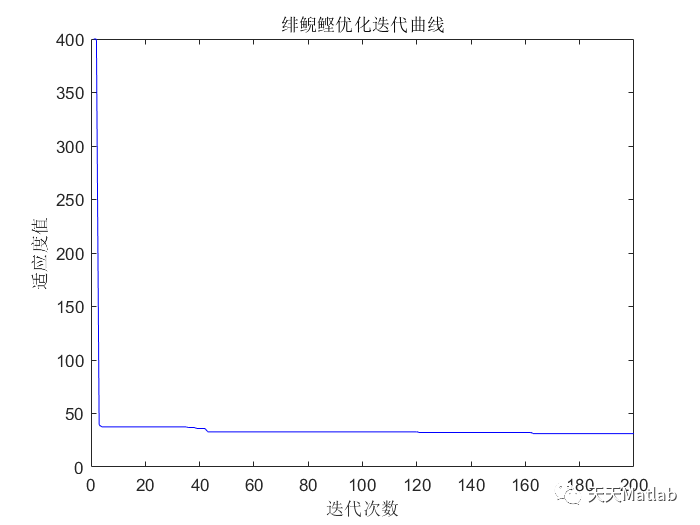
⛄ 运行结果

⛄ 参考文献
[1] 张毅,刘杰.一种基于优化混合蚁群算法的机器人路径规划算法:CN201711121774.X[P].CN107917711A[2023-07-10].
[2] 吴宪祥,郭宝龙,王娟.基于粒子群三次样条优化的移动机器人路径规划算法[J].机器人, 2009, 31(6):5.DOI:10.3321/j.issn:1002-0446.2009.06.013.
[3] 崔鼎,郝南海,郭阳宽.基于RRT*改进的路径规划算法[J].机床与液压, 2020(9).