3.1.OpenCV技能树--二值图像处理--阈值
文章目录
- 1.文章内容来源
- 2.阈值分割
-
- 2.1.简单阈值分割
-
- 2.1.1.简单阈值分割原理介绍
- 2.1.2.简单阈值分割核心代码
- 2.1.3.简单阈值分割效果展示
- 2.2.自适应阈值分割
-
- 2.2.1.自适应阈值分割原理介绍
- 2.2.2.自适应阈值分割核心代码
- 2.2.3.自适应阈值分割效果展示
- 2.3.Otsu’s二值化/大津阈值分割法
-
- 2.3.1.大津阈值分割法原理介绍
- 2.3.2.大津阈值分割法核心代码
- 2.3.3.大津阈值分割法效果展示
- 3.课后习题代码复现
-
- 3.1.课后习题题目展示
- 3.2.课后习题解决方法
-
- 3.2.1.课后习题解决方法1
- 3.2.2.课后习题解决方法2
1.文章内容来源
1.题目来源:https://edu.csdn.net/skill/practice/opencv-b77391c3fa5648f4bb92e990d6cf1922/8310?typeId=20781&language=opencv&materialId=20780
2.资料来源:https://edu.csdn.net/skill/opencv/opencv-b77391c3fa5648f4bb92e990d6cf1922?category=658&typeId=20780
2.阈值分割
2.1.简单阈值分割
2.1.1.简单阈值分割原理介绍
简单阈值分割原理:
人如其名,简单阈值分割的特点就是简单.
其原理就是我们设置一个阈值T,作为简单阈值分割的判断阈值。
如果像素值大于T,我们就将其设置为一个新的恒定值T_high(一般为255)
如果像素值小于T,我们就将其设置为一个新的恒定值T_low(一般为0)
所以简单阈值化之的图片的像素值值只有两种取值
函数解析:
cv2.threshold (src, thresh, maxval, type)
1.src:原图片
2.thresh阈值(0-255)
3.maxval:填充色,T_high(0-255)
4.Type:阈值类型
阈值类型
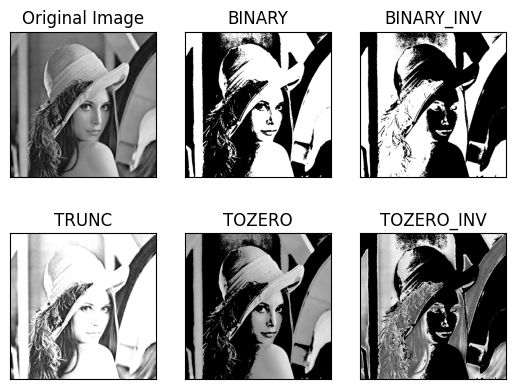
1.cv2.THRESH_BINARY 二进制阈值化,非黑即白。
2.cv2.THRESH_BINARY_INV 反二进制阈值化,非白即黑。
3.cv2.THRESH_TRUNC 截断阈值化,大于阈值设为阈值。
4.cv2.THRESH_TOZERO 阈值化为0,小于阈值设为0。
5.cv2.THRESH_TOZERO_INV 反阈值化为0,大于阈值设为0。
2.1.2.简单阈值分割核心代码
import cv2
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.image as mpimg #mpimg读取图片
img=cv2.imread(r'D:\HuaweiMoveData\Users\27182\Desktop\opencv\3.Binary image processing\lena.png',0)#必须为灰度图,单通道
#
ret,thresh1=cv2.threshold(img,127,255,cv2.THRESH_BINARY)
ret,thresh2=cv2.threshold(img,127,255,cv2.THRESH_BINARY_INV)
ret,thresh3=cv2.threshold(img,127,255,cv2.THRESH_TRUNC)
ret,thresh4=cv2.threshold(img,127,255,cv2.THRESH_TOZERO)
ret,thresh5=cv2.threshold(img,127,255,cv2.THRESH_TOZERO_INV)
#
images = [img, thresh1, thresh2, thresh3, thresh4, thresh5]
titles = ['Original Image','BINARY','BINARY_INV','TRUNC','TOZERO','TOZERO_INV']
for i in range(6):
plt.subplot(2,3,i+1)
plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([])
plt.yticks([])
plt.show()
2.1.3.简单阈值分割效果展示
2.2.自适应阈值分割
自适应阈值分割我有详细介绍的文章:https://blog.csdn.net/m0_71819746/article/details/133551187?spm=1001.2014.3001.5502
大家感兴趣可以去看看
2.2.1.自适应阈值分割原理介绍
自适应阈值分割原理介绍:
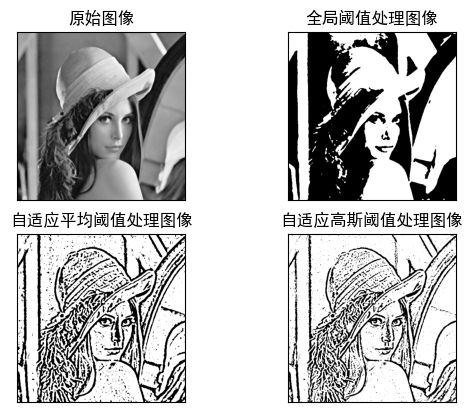
简单阈值算法使用全局阈值,但一副图像中不同位置的光照情况可能不同,全局阈值会失去很多信息。这种情况下我们需要采用自适应阈值。
自适应阈值二值化函数根据图片一小块区域的值来计算对应区域的阈值,从而得到也许更为合
dst = cv2.adaptiveThreshold(src, maxval, thresh_type, type, Block Size, C)
1.src:原图像,就是你需要进行自适应阈值分割处理的图像
2.maxValue:最大像素点,其含义表示如果某点的像素值大于对应的阈值,那么将像素值取为255.
3.adaptiveMethod:计算阈值的方法,Opencv中包括了两种:1.cv.ADAPTIVE_THRESH_MEAN_C:计算出领域的平均值作为阈值。
2.DAPTIVE_THRESH_GAUSSIAN_C:计算出领域的高斯均值作为阈值。
4.thresholdType:取值类型,只有两个取值:1.THRESH_BINARY 2.THRESH_BINARY_INV
5.blockSize:计算单位是像素的邻域块大小选择,这是局部邻域大小,只能取奇数,如3/5/7/9/11等
6.C:阈值偏移量,正负数都可以,所以阈值的大小=C+adaptiveMethod计算出的阈值值
2.2.2.自适应阈值分割核心代码
import cv2
import numpy as np
from matplotlib import pyplot as plt
# 支持中文
plt.rcParams['font.sans-serif'] = ['SimHei'] # 用来正常显示中文标签
plt.rcParams['axes.unicode_minus'] = False # 用来正常显示负号
def adaptiveThreshold_test():
img = cv2.imread(r'D:\HuaweiMoveData\Users\27182\Desktop\opencv\3.Binary image processing\lena.png',0)#读入图片
img = cv2.medianBlur(img, 5)#中值滤波来处理图像
#图像切割
#全图像二值化/全局阈值法处理图像
ret, th1 = cv2.threshold(img, 127, 255, cv2.THRESH_BINARY)
#平均值计算阈值方法(cv2.ADAPTIVE_THRESH_MEAN_C)-偏移值
th2 = cv2.adaptiveThreshold(img, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 11, 2)
#高斯值计算阈值方法(cv2.ADAPTIVE_THRESH_GAUSSIAN_C)-偏移值
th3 = cv2.adaptiveThreshold(img, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 11, 2)
#图像可视化绘制
titles = [u'原始图像', u'全局阈值处理图像',u'自适应平均阈值处理图像', u'自适应高斯阈值处理图像']
images = [img, th1, th2, th3]
for i in range(4):
plt.subplot(2, 2, i + 1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]), plt.yticks([])
plt.show()
if __name__ == '__main__':
adaptiveThreshold_test()
2.2.3.自适应阈值分割效果展示
2.3.Otsu’s二值化/大津阈值分割法
2.3.1.大津阈值分割法原理介绍
大津阈值分割法原理介绍:
1.Otsu's二值化是对一副双峰图像自动根据其直方图计算出一个阈值。(对于非双峰图像,这种方法得到的结果可能会不理想)。
2.这里用到到的函数还是 cv2.threshold(),但是需要多传入一个参数(flag):cv2.THRESH_OTSU。
3.这时要把阈值设为 0。然后算法会找到最优阈值,这个最优阈值就是返回值 retVal。
4.如果不使用Otsu值化,返回的retVal值与设定的阈值相等。
Otsu's算法流程:
1.计算图像直方图;
2.设定一阈值,把直方图强度大于阈值的像素分成一组,把小于阈值的像素分成另外一组;
3.分别计算两组内的偏移数,并把偏移数相加;
4.把0~255依照顺序多为阈值,重复1-3的步骤,直到得到最小偏移数,其所对应的值即为结果阈值。
2.3.2.大津阈值分割法核心代码
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread(r'D:\HuaweiMoveData\Users\27182\Desktop\opencv\3.Binary image processing\lena.png',0)
ret1,th1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY)# 全局阈值
ret2,th2 = cv2.threshold(img,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)# Otsu's thresholding
blur = cv2.GaussianBlur(img,(5,5),0)#(5,5)为高斯核的大小, 0 为标准差
ret3,th3 = cv2.threshold(blur,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)#高斯降噪后Otsu’s处理
#绘制图像
images = [img, 0, th1,
img, 0, th2,
blur, 0, th3]
titles = ['Original Noisy Image','Histogram','Global Thresholding (v=127)',
'Original Noisy Image','Histogram',"Otsu's Thresholding",
'Gaussian filtered Image','Histogram',"Otsu's Thresholding"]
# 这里使用了 pyplot 中画直方图的方法, plt.hist, 要注意的是它的参数是一维数组
# 所以这里使用了(numpy)ravel 方法,将多维数组转换成一维,也可以使用 flatten 方法
#ndarray.flat 1-D iterator over an array.
#ndarray.flatten 1-D array copy of the elements of an array in row-major order.
for i in range(3):
plt.subplot(3,3,i*3+1),plt.imshow(images[i*3],'gray')
plt.title(titles[i*3]), plt.xticks([]), plt.yticks([])
plt.subplot(3,3,i*3+2),plt.hist(images[i*3].ravel(),256)
plt.title(titles[i*3+1]), plt.xticks([]), plt.yticks([])
plt.subplot(3,3,i*3+3),plt.imshow(images[i*3+2],'gray')
plt.title(titles[i*3+2]), plt.xticks([]), plt.yticks([])
plt.show()
2.3.3.大津阈值分割法效果展示

3.课后习题代码复现
3.1.课后习题题目展示
Question1:
按照颜色对图像进行分类,可以分为彩色图像、灰度图像和二值图像。
灰度图像是只含亮度信息,不含色彩信息的图像。
灰度化处理是把彩色图像转换为灰度图像的过程,是图像处理中的基本操作。
OpenCV 中彩色图像使用 BGR 格式。灰度图像中用 8bit 数字 0~255 表示灰度,如:0 表示纯黑,255 表示纯白。
彩色图像进行灰度化处理,可以在读取图像文件时直接读取为灰度图像,也可以通过函数 cv.cvtColor() 将彩色图像转换为灰度图像。
以下图像灰度化程序中,能够正确执行图像灰度化操作的是?
3.2.课后习题解决方法
3.2.1.课后习题解决方法1
#方法1:
#方法一:imread时直接转灰度
import cv2 as cv
if __name__ == '__main__':
img = cv.imread(r"D:\HuaweiMoveData\Users\27182\Desktop\opencv\3.Binary image processing\lena.png", cv.IMREAD_GRAYSCALE)
cv.imshow("ImgGray", img)
key = cv.waitKey(0)
3.2.2.课后习题解决方法2
#%%
#方法二:用cvtColor(src,cv.COLOR_BGR2GRAY)
import cv2 as cv
if __name__ == '__main__':
img = cv.imread(r"D:\HuaweiMoveData\Users\27182\Desktop\opencv\3.Binary image processing\lena.png")
imgGray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
cv.imshow("ImgGray", imgGray)
key = cv.waitKey(0)