linux篇【10】:进程信号
目录
一.信号入门
1.信号是操作系统内一个内置机制
2.前后台进程的几条命令与ctrl+c,Ctrl+z
3.信号分类
4.信号产生是异步的
5.进程是如何记住这个信号
(3)存储方式:位图
二.signal ——对某信号设置自定义行为(捕捉)的函数
(1)证明 ctrl + c 是2号信号
(2)ctrl+\:3号信号 ——默认也是终止自己
9号信号:管理员信号,该信号不可被自定义设置(捕捉)。除了D状态进程,其他进程都可杀。SIGSTOP(19号信号)/SIGKILL(9号信号)信号无法被阻塞,无法被自定义,无法被忽
(3) 一个进程无法被kill杀死的可能有哪些
三.用户层产生信号的方式(信号产生前)
1.敲键盘的信号发送过程
2.通过 系统接口 完成对进程发送信号
(1)kill
自己写一个mykill命令:
(2)raise
(3)abort
① abort() = exit()
②9号信号不可被捕捉,6号信号是可以被捕捉,但捕捉完还是要退出
3. 软件条件,定闹钟alarm
①1秒IO只能不到2w次
②但实际CPU 1秒能跑5亿次,证明IO效率低
4.硬件异常产生信号
(1)除零错误 与 越界&&野指针
(2)崩溃了,一定会导致进程终止吗?——答:不一定!
四.core dump 核心转储
1.status中的core dump标记位
(1)core dump 核心转储 详细解释:
(2)观察core dump标记位
(3) core可以用gdb定位错误
五.阻塞信号(信号产生中)
1. 信号其他相关常见概念
2. 在内核中的表示
信号忽略和信号阻塞区别:
3.sigset_t(位图)
4.信号集操作函数
5.sigprocmask
6.sigpending
六.信号的捕捉(信号处理后)
1.用户态和内核态
2.自定义捕捉信号的处理过程
3.第二个捕捉函数 sigaction
(1)sigaction介绍
killall mysignal——根据进程名杀进程
(2)sa_mask 解释
(3)handler可以配合使用switch语句:
4.可重入函数
5.volatile
(1)常规情况(无-O2优化,无volatile)
(2)优化情况(有-O2优化,无volatile)
(3)优化+volatile 情况(有-O2优化,有volatile)
(4)volatile关键字可以保证并发编程中的可见性,有序性。
七.SIGCHLD信号
1.子进程在 终止/暂停(stop)/继续运行时 会给父进程发SIGCHLD信号(ctrl+z是19号信号-暂停进程)
(1)进程退出会发信号
(2)进程 暂停(stop)/继续运行 会发信号(ctrl+z是19号信号-暂停进程)
2.等待的方案
(1)单个子进程退出
(2)多个子进程同时退出时的等待方案
(3)多个子进程不同时退出时的等待方案
(4)将SIGCHLD的处理动作置为SIG_IGN——自动释放子进程
一.信号入门
1.信号是操作系统内一个内置机制
信号是给进程发送的,进程要具备处理信号的能力。
1.该能力一定是预先已经早就有了的(程序员——>写OS的代码,OS帮我们提供)
2.进程能够识别对应的信号
3.进程能够处理对应信号
对于进程来讲,即便是信号还没有产生,我们进程已经具有识别和处理这个信号的能力了,因为信号是操作系统内一个内置的机制。
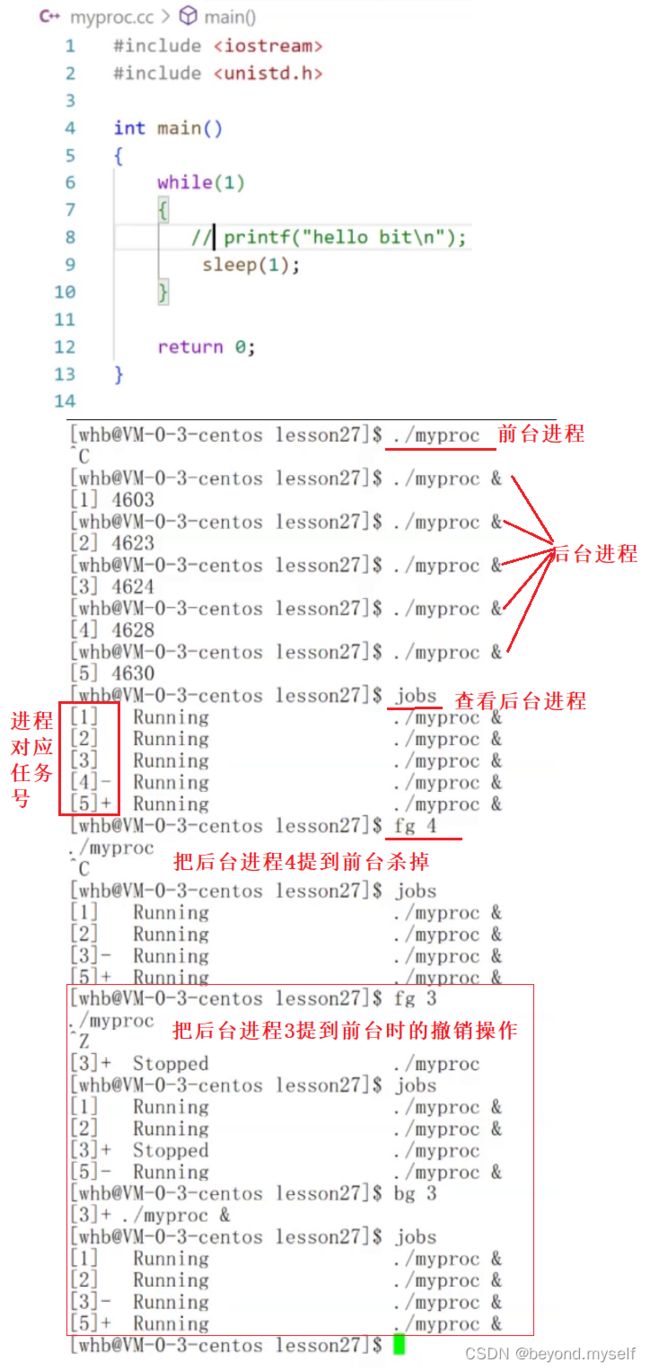
2.前后台进程的几条命令与ctrl+c,Ctrl+z
- 前台进程:占有控制终端的进程,其它称为后台进程。前台进程可以ctrl+c杀掉,后台进程不可杀,只能把后台进程转成前台进程再ctrl+c杀掉。
Ctrl+c是强制中断程序的执行,杀死程序的进程;
Ctrl+z是将任务中断,挂起的状态,进程还存在,任务还没有结束,用户可以通过使用fg命令将中断的命令再次启动运行;
ctrl+c:硬件行为被解释成信号,发送给进程。作用:杀死进程
jobs:查看后台进程
./proc &:把proc这个前台进程放入后台
fg (任务号):把作业号对应的后台进程放入前台
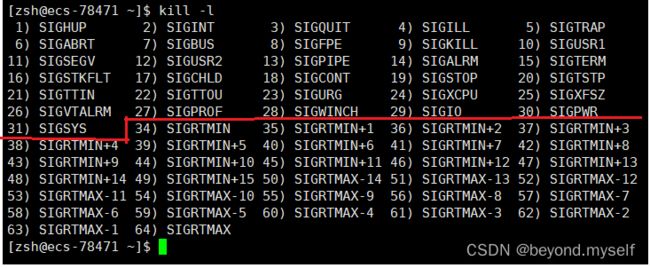
3.信号分类
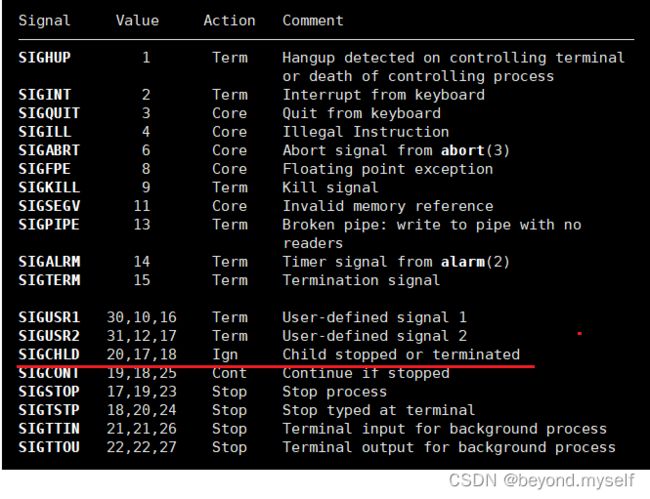
1~31:普通信号(我们要学习的信号)也叫不可靠信号。 34~64:实时信号(带RM) 【34】SIGRTMIN(实时信号也叫可靠信号)
普通信号介绍:1) SIGHUP ——>1是信号的编号,SIGHUP是信号名称。信号就是宏,SIGHUP的值就是1
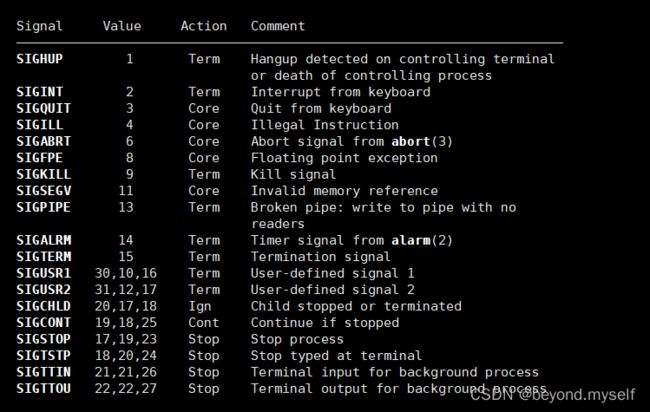
查看详细信号命令
man 7 signal
4.信号产生是异步的
因为信号产生是异步的(互不干扰,同步反义词),当信号产生的时候,对应的进程可能正在做更重要的事情,我们进程可以暂时不处理这个信号!——进程可能不需要立即处理这个信号。不代表这个信号不会被处理
未来要处理,所以你必须记住这个信号已经来了(要记住:①是否有信号。②什么信号。 )(你在玩游戏,外卖员敲门,你说等一会儿)
①默认动作(吃外卖)
②忽略(把外面放在外卖,不吃)
③自定义动作(把外卖给弟弟吃)
这就是类比了信号的处理,信号的捕捉,递达处理动作。
5.进程是如何记住这个信号
(1)要存储的内容:
① 有没有产生【位图比特位的内容1,0】
② 什么信号产生【位图比特位的位置】
(2)存储在哪里:信号内容记录在 进程的PCB中的
(3)存储方式:位图
task_ struct {
uint32_ _t sig; 位图,0000 0010
}
进程的task_ struct是内核的数据结构
只有OS有这个权利,能直接修改这个task_struct内的数据位图
OS是进程的管理者,进程的所有属性的获取和设置,只能由OS来。
无论信号怎么产生,最终一定只能是OS帮我们进行信号的设置!
二.signal ——对某信号设置自定义行为(捕捉)的函数
man 2 signal
typedef void (*sighandler_t)(int);
sighandler_t signal(int signum, sighandler_t handler);
signum:对哪个信号设置捕捉动作。 handler:自定义对信号的捕捉动作的函数

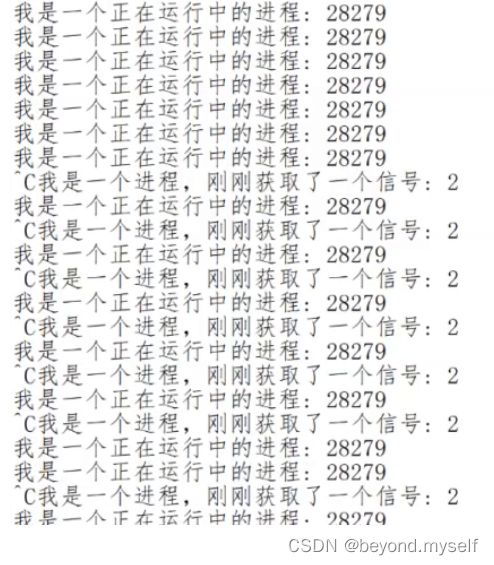
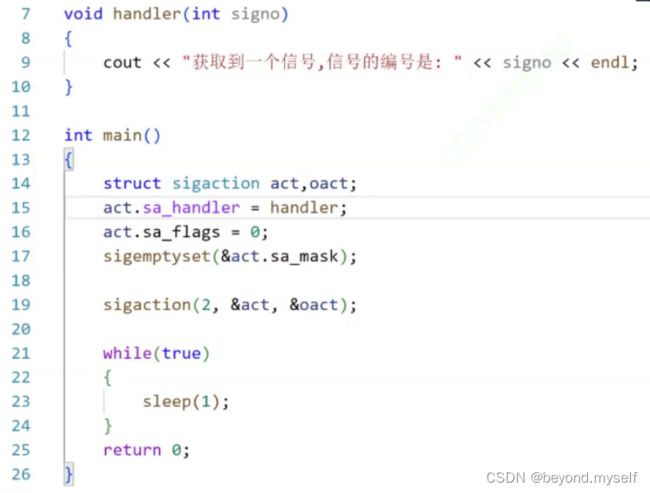
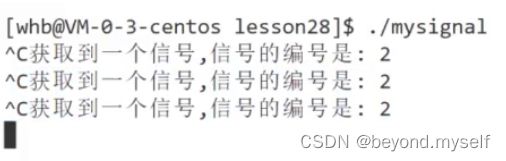
(1)证明 ctrl + c 是2号信号
这里不是调用hander方法,这里只是设置了一个回调(注册这个方法),让SIGINT(2)产生的时候,该方法才会被调用,如果不产生SIGINT(2),该方法不会被调用!
ctrl + c : 本质就是给前台进程发送2号信号给目标进程,目标进程默认对2号信号的处理,是终止自己
今天更改了对2号信号的处理,设置了用户自定义处理方法
void handler(int signo)
{
cout << "我是一个进程,刚刚获取了一个信号: " << signo << endl;
}
int main()
{
//这里不是调用hander方法,这里只是设置了一个回调,让SIGINT(2)产生的时候,该方法才会被调用
//如果不产生SIGINT(2),该方法不会被调用!
//ctrl + c : 本质就是给前台进程发送2号信号给目标进程,目标进程默认对2号信号的处理,是终止自己
//今天更改了对2号信号的处理,设置了用户自定义处理方法
signal(SIGINT, handler); // 设置所有的信号的处理动作,都是自定义动作
while (true)
{
cout << "我是一个正在运行中的进程: " << getpid() << endl;
sleep(1);
}
return 0;
}
(2)ctrl+\:3号信号 ——默认也是终止自己
void handler(int signo)
{
cout << "我是一个进程,刚刚获取了一个信号: " << signo << endl;
}
int main()
{
signal(SIGINT, handler); // 设置所有的信号的处理动作,都是自定义动作
signal(3, handler);
while (true)
{
cout << "我是一个正在运行中的进程: " << getpid() << endl;
sleep(1);
}
return 0;
}
这个进程里面自定义这些终止信号后,就只能用9号信号杀死。
9号信号:管理员信号,该信号不可被自定义设置(捕捉)。除了D状态进程,其他进程都可杀。SIGSTOP(19号信号)/SIGKILL(9号信号)信号无法被阻塞,无法被自定义,无法被忽
(3) 一个进程无法被kill杀死的可能有哪些
A①这个进程阻塞了信号
B②用户有可能自定义了信号的处理方式
C③这个进程有可能是僵尸进程
D④这个进程当前状态是停止状态
A正确 信号被阻塞,则暂时不被处理(SIGKILL/SIGSTOP除外,因为无法被阻塞,这里说的是可能性,因此不做太多纠结)
B正确 自定义处理之后,信号的处理方式有可能不再是进程退出
C正确 僵尸进程因为已经退出,因此不做任何处理
D正确 进程停止运行,则将不再处理信号
三.用户层产生信号的方式(信号产生前)
1.敲键盘的信号发送过程
键盘产生信号,OS给进程发送的信号——发送信号(写入信号):就是OS在位图中把对应信号的位图由0置1,即可完成发送信号(发送信号不如说成写入信号)。详解ctrl+v的信号发送过程:
—敲键盘ctrl+v,键盘产生信号后,通过中断的方式告诉OS,CPU直接调用中断向量表中的方法,把ctrl+v这个组合按键读取进来,OS识别此组合按键,OS对组合按键进行解释,解释成信号,OS找到对应进程,在位图中把对应信号的位图由0置1。
2.通过 系统接口 完成对进程发送信号
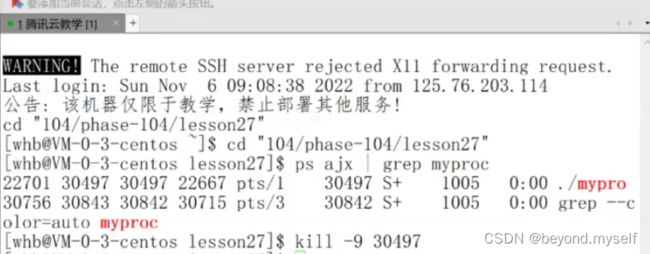
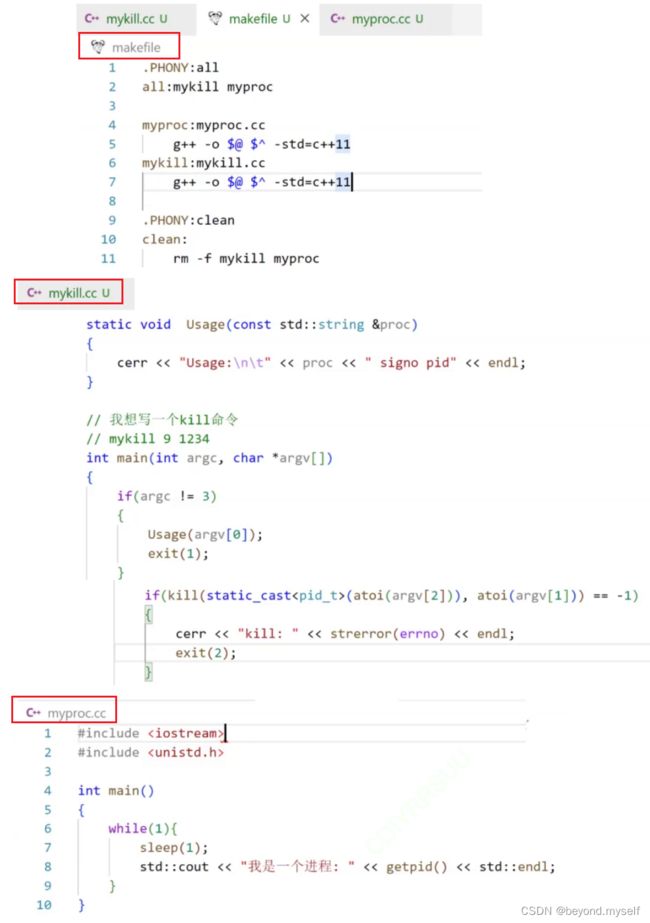
(1)kill
man 2 killint kill(pid_t pid, int sig);
向任意进程pid发送任意信号sig
返回值:成功返回0;失败返回-1

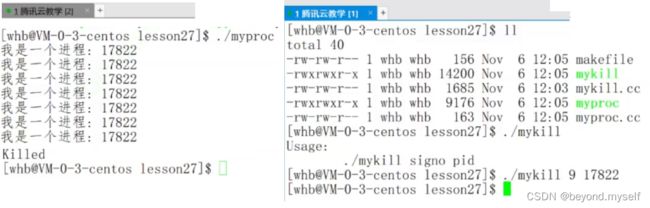
自己写一个mykill命令:
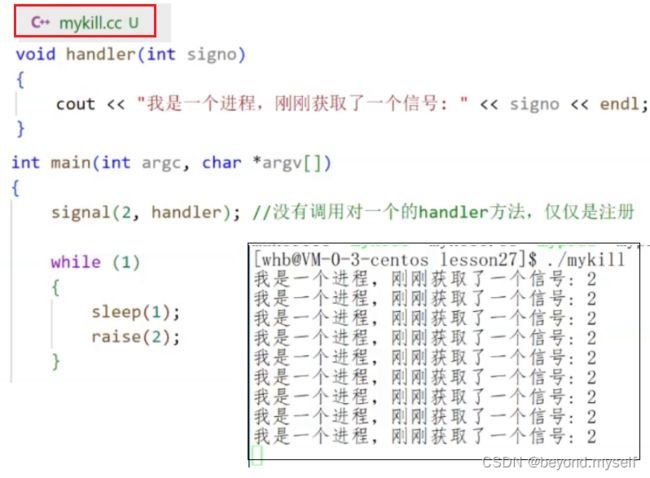
(2)raise
man 3 raise给自己这个进程发送任意信号

(3)abort
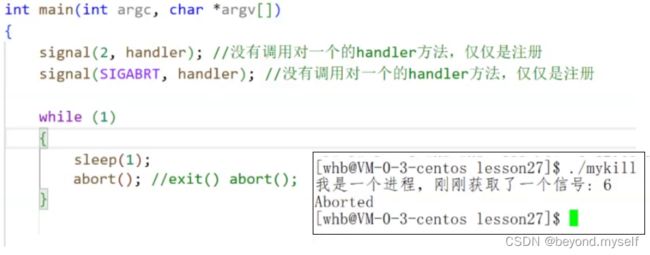
man 3 abort向自己这个进程发送 SIGABRT 这个6号信号
① abort() = exit()
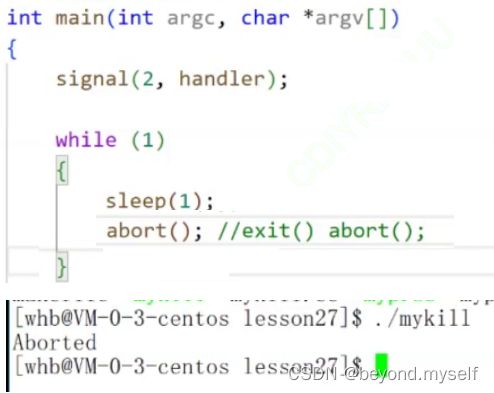
②9号信号不可被捕捉,6号信号是可以被捕捉,但捕捉完还是要退出
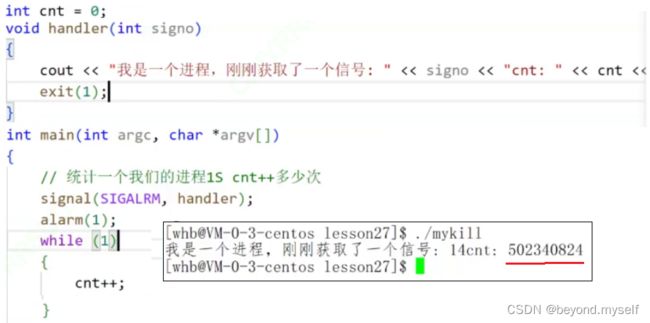
3. 软件条件,定闹钟alarm
alarm
man 2 alarm定闹钟:seconds秒以后给自己这个进程发送信号 14 SIGALRM
①1秒IO只能不到2w次

②但实际CPU 1秒能跑5亿次,证明IO效率低
4.硬件异常产生信号
(1)除零错误 与 越界&&野指针
进程崩溃的本质,是该进程收到了异常信号。
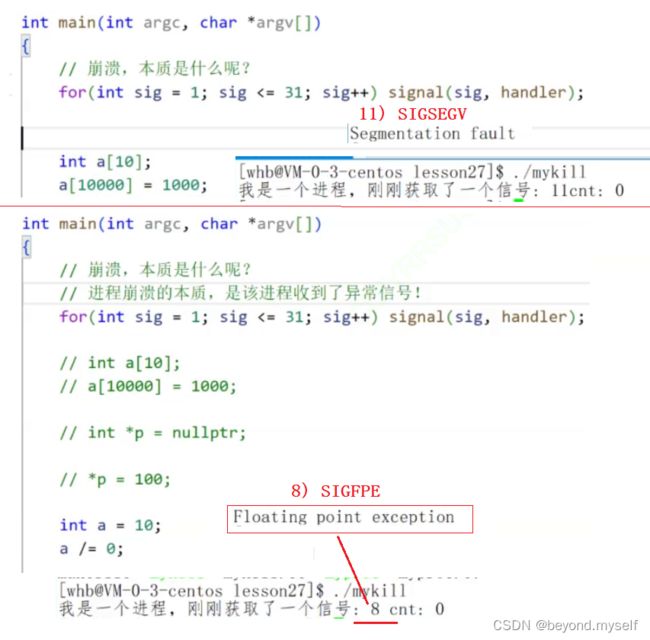
因为硬件异常,而导致OS向目标进程发送信号,进而导致进程终止的现象!
除零错误: CPU内部,状态寄存器,当我们除0的时候,CPU内的状态寄存器会被由0置1,设置成为 有报错:浮点数越界。CPU的内部寄存器(硬件)会记录报错,OS就会识别到CPU内有报错啦 -> 识别之后OS会确认 ①谁干的?② 是什么报错,OS结合报错会构建信号,并向目标进程发送信号->目标进程在合适的时候处理信号,处理一般信号就是终止进程
越界&&野指针: 我们在语言层面使用的地址(指针), 其实都是虚拟地址,虚拟地址要转成物理地址->然后才能访问物理内存->才可以读取对应的数据和代码
如果虚拟地址有问题,因为地址转化的工作是由(MMU(memory maneger unit 内存管理单元,是硬件)+页表(软件)), 转化过程就会引起问题->表现在硬件MMU上->OS发现硬件出现了问题会确认:①谁干的?② 是什么报错(OS->构建信号) -> 向目标进程发送信号->目标进程在合适的时候->处理信号->终止进程
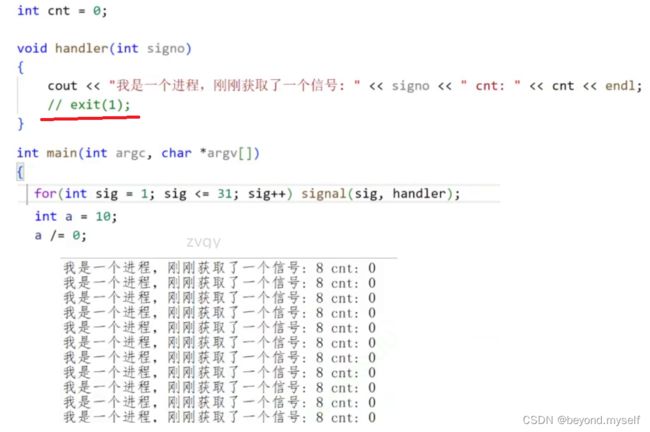
(2)崩溃了,一定会导致进程终止吗?——答:不一定!
例如:我们把信号都重新注册了,但是注册的方法里面没有终止程序(exit),那么当发生除0错误时,OS给进程发送8号信号,但是由于没有中断进程,这个异常一直存在,OS会持续不断的发送8号进程,此时崩溃了,但是进程也并没有终止
小总结:
——OS将进程PCB中信号位图的比特位由0置1
四.core dump 核心转储
1.status中的core dump标记位
man 7 signal
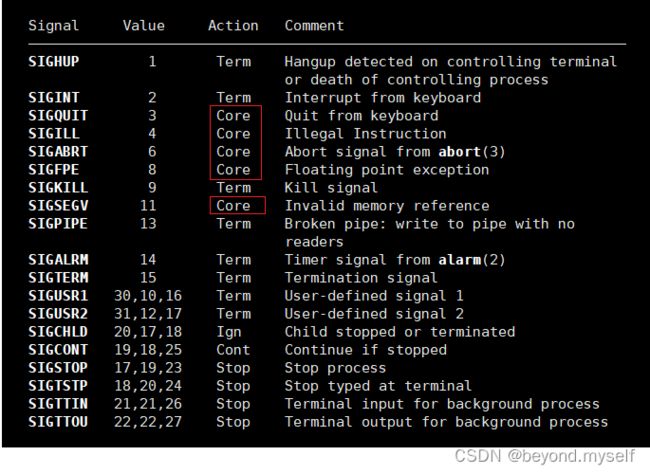
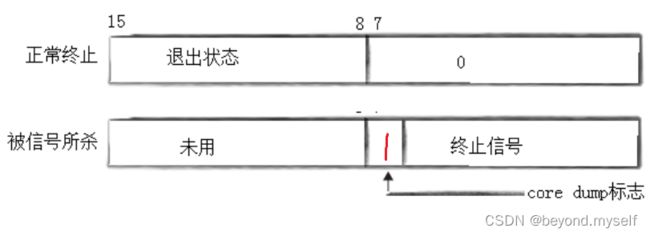
(1)core dump 核心转储 详细解释:
像3,4,6,8,11这些信号属于代码内部出现问题导致的进程终止(比如4:非法指令。6:abort终止。8:浮点数错误。11:越界。),这些异常可以调试。如果父进程获取子进程退出信息时,若被这几种信号终止,status中的core dump标记位会被置1,并且会生成一个叫 core.22357 的大文件,22357 叫引起core文件(崩溃)的进程pid。
即:core dump 核心转储定义: core dump 会把进程在运行中,对应的异常上下文数据,core dump(转而存储)到磁盘上,方便调试,同时会把status中的 status- >core dump -> 置1
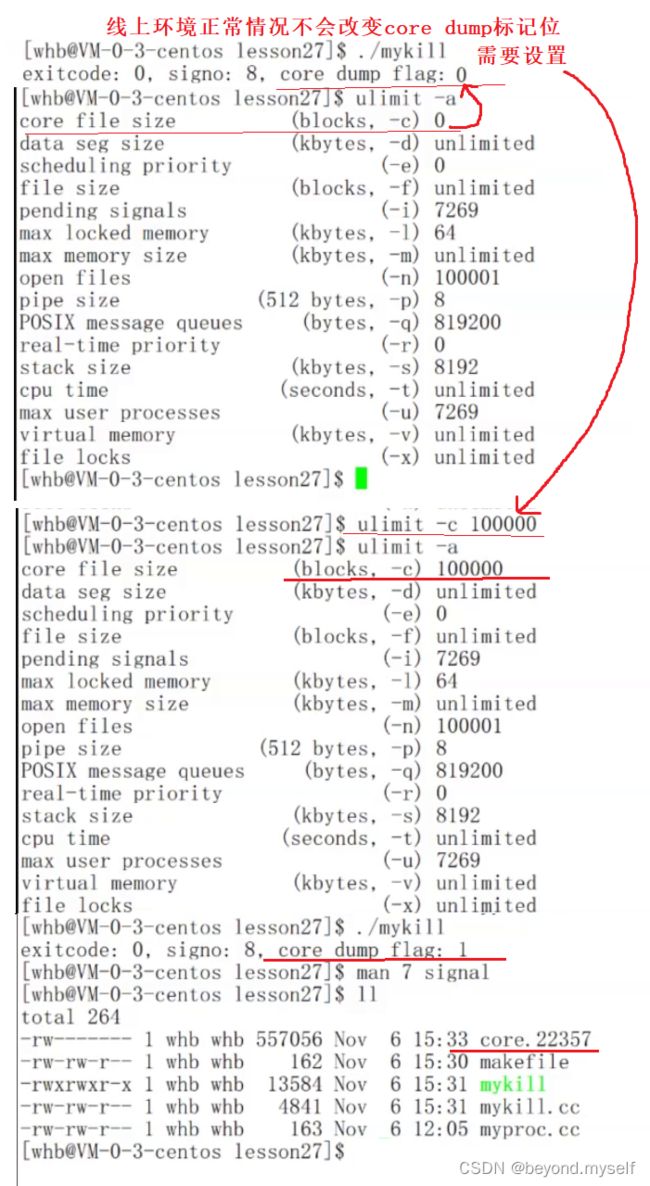
(2)观察core dump标记位
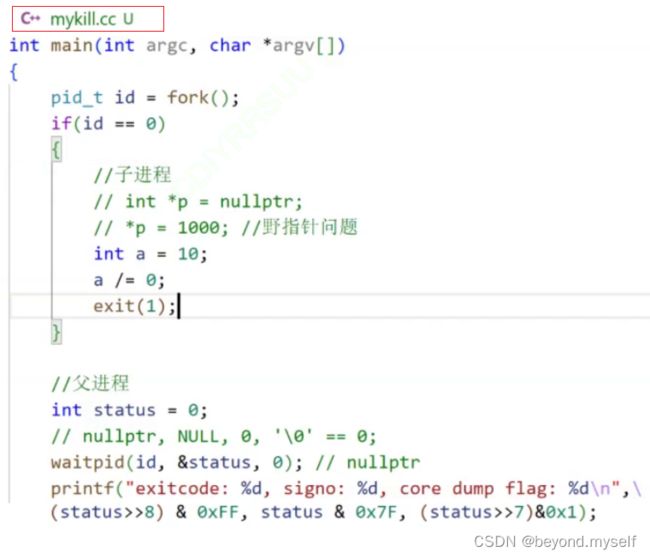
ulimit -a 打开 core dump文件
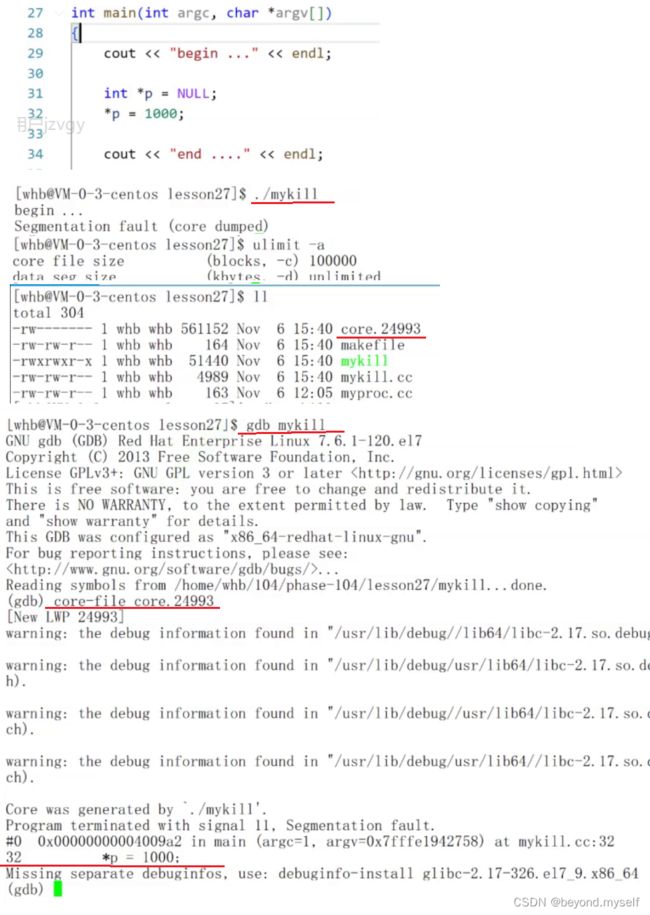
(3) core可以用gdb定位错误
五.阻塞信号(信号产生中)
1. 信号其他相关常见概念
2. 在内核中的表示
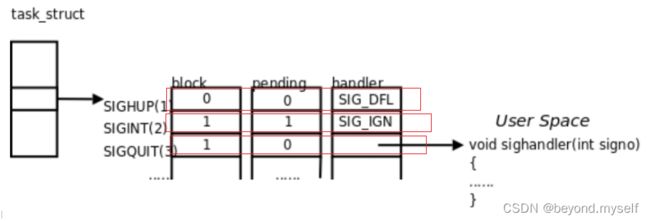
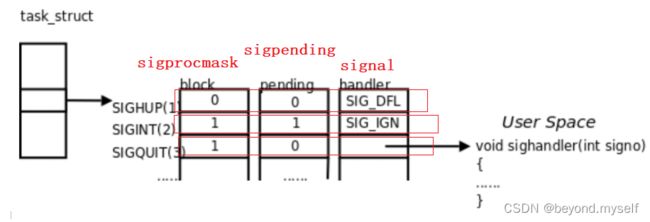
横着看——block—pending—hander横着每一格对应每一格
pending:未决信号集。(用途:代表是否收到信号)就是一个32bit的位图,存信号标记位,比特位位置是信号编号(第一个比特位代表1号信号),比特位内容代表 是否收到信号。(信号产生时,内核在进程控制块中设置该信号的未决标志,直到信号递达才清除该标志。)
【非可靠信号在进行注册时,会查看是否已经有相同信号添加到未决集合中,如果有则什么都不做,因此非可靠信号只会添加一次,因此处理完毕后会直接移除(准确来说是先移除,后处理)。而可靠信号会重复添加信号信息到sigqueue链表中,相当于可靠信号可以重复添加,处理完毕后,因为有可能还有相同的信号信息待处理,因此并不会直接移除,而是检测没有相同信号信息后才会从pending集合中移除】
block:信号屏蔽字(阻塞信号集)。和pending一样的是 比特位位置是信号编号,不同的是 比特位内容代表 是否阻塞该信号——为1:拦截对应信号执行对应的方法,举例:即使pending[0]=1,block[0]=1,1号信号也无法执行hander里面对应的方法( 阻塞信号集也叫做当前进程的 信号屏蔽字(Signal Mask),这里的“屏蔽”应该理解为阻塞而不是忽略。)
信号忽略和信号阻塞区别:
信号忽略是处理信号的方式,处理方式是忽略他;信号阻塞是拦截信号的递达,不让信号被处理
3.sigset_t(位图)
sigset_t就是一个位图
# define _SIGSET_NWORDS (1024 / (8 * sizeof (unsigned long int)))
typedef struct
{
unsigned long int __val[_SIGSET_NWORDS];
} __sigset_t;4.信号集操作函数
5.sigprocmask
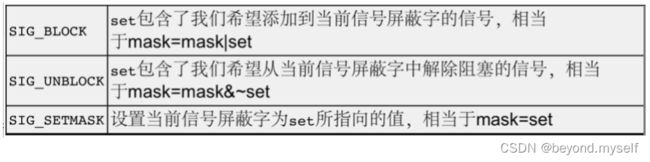
const sigset_t *set 是输入型参数,set传入一个信号集,
如果how是 SIG_BLOCK :则把set中包含的信号添加到当前进程的信号屏蔽字block表中(block对应标记位由0置1),当前进程的信号屏蔽字中已经屏蔽的信号不会改变。
如果how是 SIG_UNBLOCK:则把set中包含的信号从到当前进程的信号屏蔽字block表中解除屏蔽block对应标记位由1置0),当前进程的信号屏蔽字中其他已经屏蔽的信号不会改变。
如果how是 SIG_SETMASK:直接把用set这个信号集把 当前进程的信号屏蔽字block表 覆盖。
sigset_t *oset 是输出型参数:把原本老的信屏蔽字返回出来,以便恢复,如果不想返回就传nullptr
如果调用sigprocmask解除了对当前若干个未决信号的阻塞,则在sigprocmask返回前,至少将其中一个信号递达。
使用示例:
6.sigpending
总结:sigprocmask修改block表;sigpending读取 pending表;signal修改hander表
#include
#include
#include
#include
#include
#include
#include
#include
using namespace std;
int cnt = 0;
void handler(int signo)
{
cout << "我是一个进程,刚刚获取了一个信号: " << signo << " cnt: " << cnt << endl;
// exit(1);
}
static void showPending(sigset_t *pendings)
{
for (int sig = 1; sig <= 31; sig++)
{
if (sigismember(pendings, sig))
{
cout << "1";
}
else
{
cout << "0";
}
}
cout << endl;
}
int main(int argc, char *argv[])
{
cout << "pid: " << getpid() << endl;
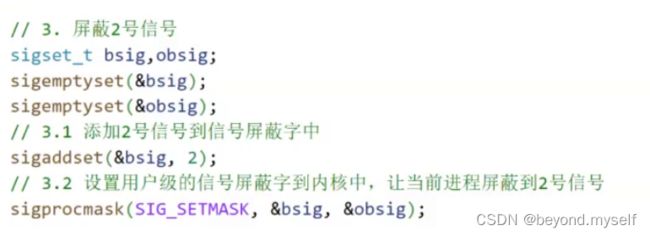
sigset_t bsig, obsig;
sigemptyset(&bsig);
sigemptyset(&obsig);
// sigfillset();
for (int sig = 1; sig <= 31; sig++) //将当前进程阻塞所有信号,并注册所有信号
{
sigaddset(&bsig, sig);
signal(sig, handler);
}
// 设置用户级的信号屏蔽字到内核中
sigprocmask(SIG_SETMASK, &bsig, &obsig);
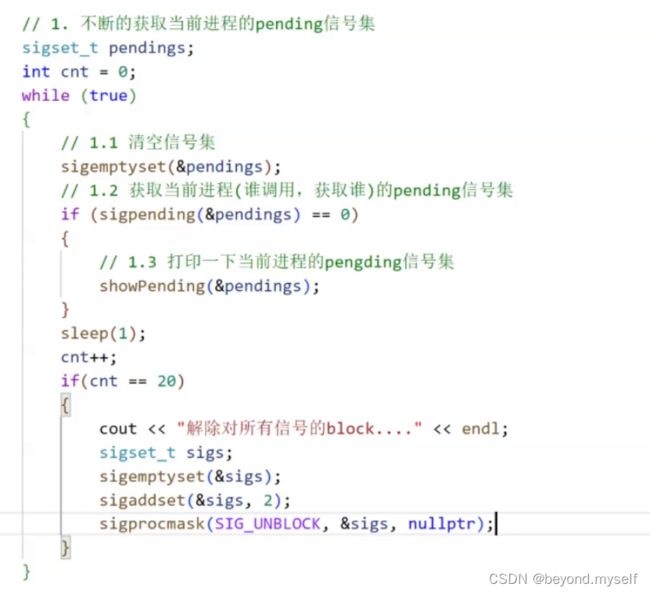
// 1. 不断的获取当前进程的pending信号集
sigset_t pendings;
int cnt = 0;
while (true)
{
// 1.1 清空信号集
sigemptyset(&pendings);
// 1.2 获取当前进程(谁调用,获取谁)的pending信号集
if (sigpending(&pendings) == 0)
{
// 1.3 打印一下刚刚获取到的当前进程的pengding信号集
showPending(&pendings);
}
sleep(1);
cnt++;
if(cnt == 20) //第20秒时解除2号信号的阻塞
{
cout << "解除对2号信号的block...." << endl;
sigset_t sigs;
sigemptyset(&sigs);
sigaddset(&sigs, 2);
sigprocmask(SIG_UNBLOCK, &sigs, nullptr);
}
} 
六.信号的捕捉(信号处理后)
进程处理信号,不是立即处理的。
合适的时候,是什么时候呢? ?——当当前进程从内核态,切换回用户态的时候,进行信号的检测与处理! 先解释用户态和内核态:
1.用户态和内核态
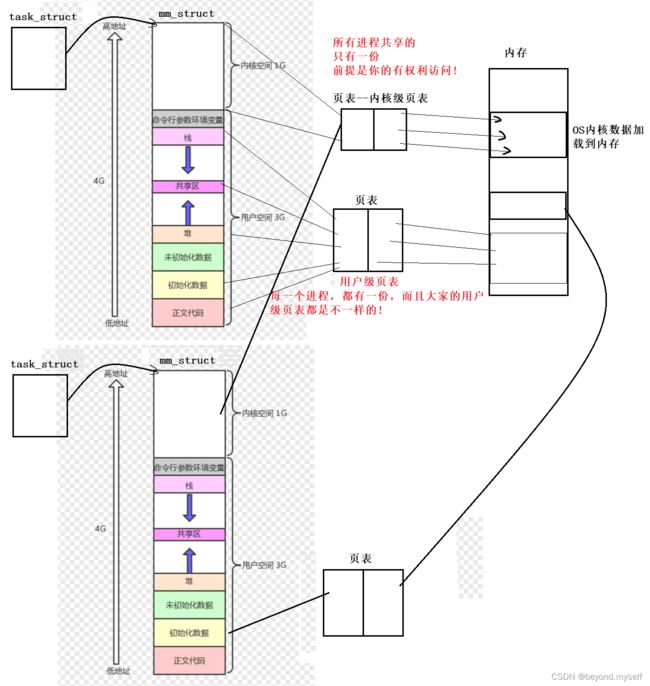
①OS在不在内存中被加载呢? ?——在
无论进程怎么切换,我们都可以找到内核的代码和数据,前提是你只要能够有权利访问!
②当前进程如何具备权利 访问这个内核页表乃至访问内核数据呢?——要进行身份切换。
进程如果是用户态的——>只能访问用户级页表 0~3G
进程如果是内核态的——>访问内核级和用户级的页表 3~4G
③我怎么知道我是用户态的还是内核态的呢?
CPU内部有对应的状态寄存器CR3, CR3有比特位标识当前进程的状态 0:内核态,3:用户态
④0—>3 用户态切到内核态的情况:1.系统调用的时候。2.时间片到了,进程间切换。3.其他等等。执行完毕就继续切回用户态。即:程序运行从用户态切换到内核态的操作:中断/异常/系统调用,例如
<1> 整数除以零操作会导致用户态—>内核态:因为会导致程序异常(分母不能为0)
<2> sin()函数调用操作不会切换状态,因为库函数并不会引起运行态的切换
<3> read 系统调用操作会导致用户态—>内核态:符合系统调用接口
⑤内核态vs用户态
内核态可以访问所有的代码和数据——内核态具备更高权限
用户态只能访问自己的
⑥我们的程序,会无数次直接或者间接的访问系统级软硬件资源(管理者是OS),本质上,你并没有自己去操作这些软硬件资源,而是必须通过OS- >无数次的陷入内核(1.切换身份3->0 2.切换页表,切到内核级页表)->调用内核的代码->完成访问的动作->结果返回给用户(1.切换身份0->3 2. 切换页表,切到用户级页表)->用户得到结果
⑦while(1);死循环进程普通程序会身份切换吗? —>也会陷入内核,来回切换身份 —>你也有自己的时间片 —>时间片到了的时候->OS收到中断信息,把进程从cpu移走,进程切到内核态,更换内核级页表 —>保护上下文,执行调度算法 —>选择了新的进程 —>恢复新进程的上下文 —>用户态,更换成用户级页表 —>CPU执行的就是新进程的代码!
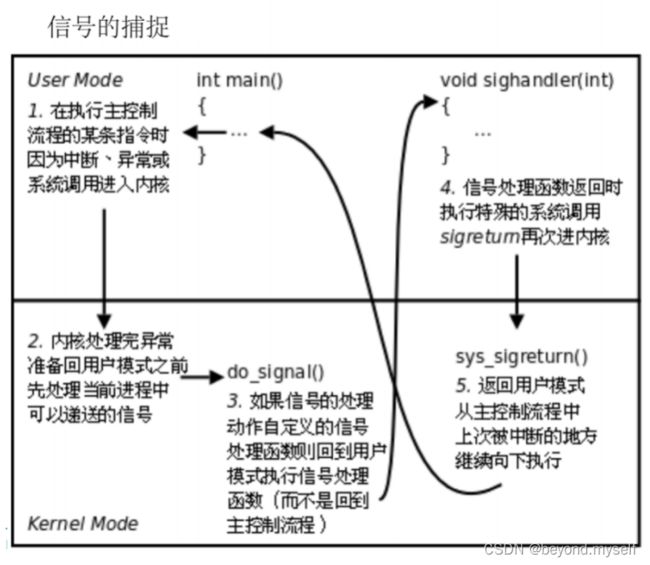
2.自定义捕捉信号的处理过程
①因为一些系统调用例如open(),用户态—>内核态,处理完open的代码后
②本来可以返回代码继续执行了,但是正好处于内核态,就顺便去检测信号,并处理信号。
③处理信号:若是阻塞或无信号(忽略/默认)就直接进行对应简答操作就 内核态—>用户态 返回即可 / 若是非阻塞并有信号的自定义捕捉,就 内核态—>用户态 执行对应的handler方法。(执行handler方法为什么只能是用户态?解释:内核态是什么都可以做的,如果让内核态做用户自定义代码,万一用户写的是一段恶意代码呢? ? ?比如rm根目录等等,这样内核态身份就被恶意利用了,所以内核为了保护自己,就只能用户态执行用户的代码)
④执行完信号对应方法后再由 用户态—>内核态 回到内核。此时所有任务都完成:系统接口调用完成,信号捕捉完成。
⑤完成所有任务后,由 内核态—>用户态 通过特殊系统调用返回到当时用户跳出的代码中。
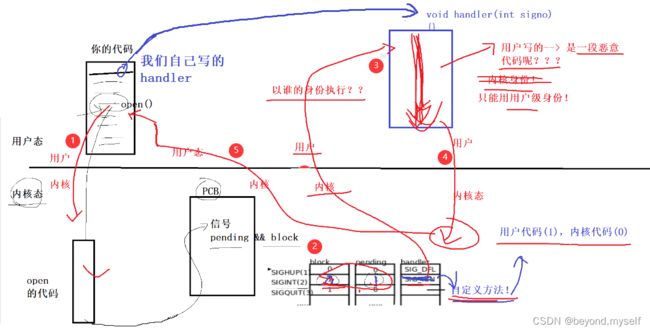
结论:进程的生命周期中,会有很多次机会去陷入内核(中断,陷阱,系统调用,异常...),一定会存在很多次的机会进行内核态返回用户态。进程的信号在被合适的时候处理,合适的时候:从内核态返回到用户态的时候,返回之前顺便检测信号,并处理信号
过程图,跟上面一样,可以忽略:
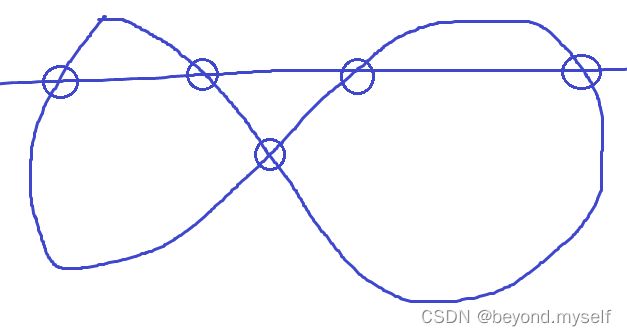
记忆图 :无穷大画法
无穷大中间交点要在横线下方,则有多少个交点,就证明有多少个状态切换;方向决定了 是内核到用户,还是用户到内核

3.第二个捕捉函数 sigaction
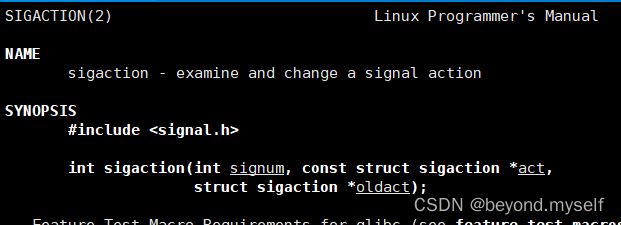
(1)sigaction介绍
int sigaction(int signum, const struct sigaction *act, struct sigaction *oldact);
signum:要对哪个信号自定义捕捉。act:设置成什么动作。oldact:老动作,输出型参数,不要就设置nullptr
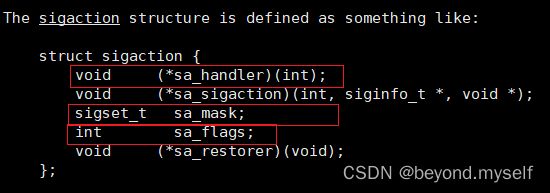
只用填sa_handler,sa_mask,2个 ,sa_flags 默认为0不考虑,其他是实时信号的也不考虑、
sa_handler:注册信号的函数处理方法
sa_ mask ——作用:执行某①信号处理函数时,信号集位图sa_ mask中有某②信号,阻塞①信号同时,阻塞 sa_ mask 传入的②信号——(2)是详细解释
例1
例2

killall mysignal——根据进程名杀进程
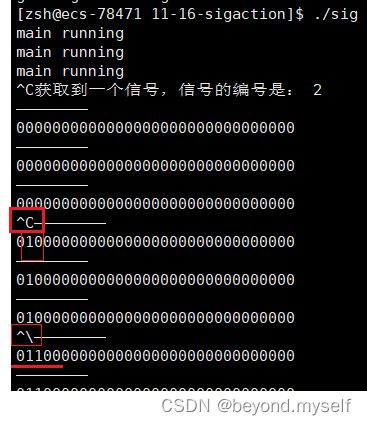
(2)sa_mask 解释
sa_ mask ——作用:执行某①信号处理函数时,信号集位图sa_ mask中有某②信号,阻塞①信号同时,阻塞 sa_ mask 传入的②信号
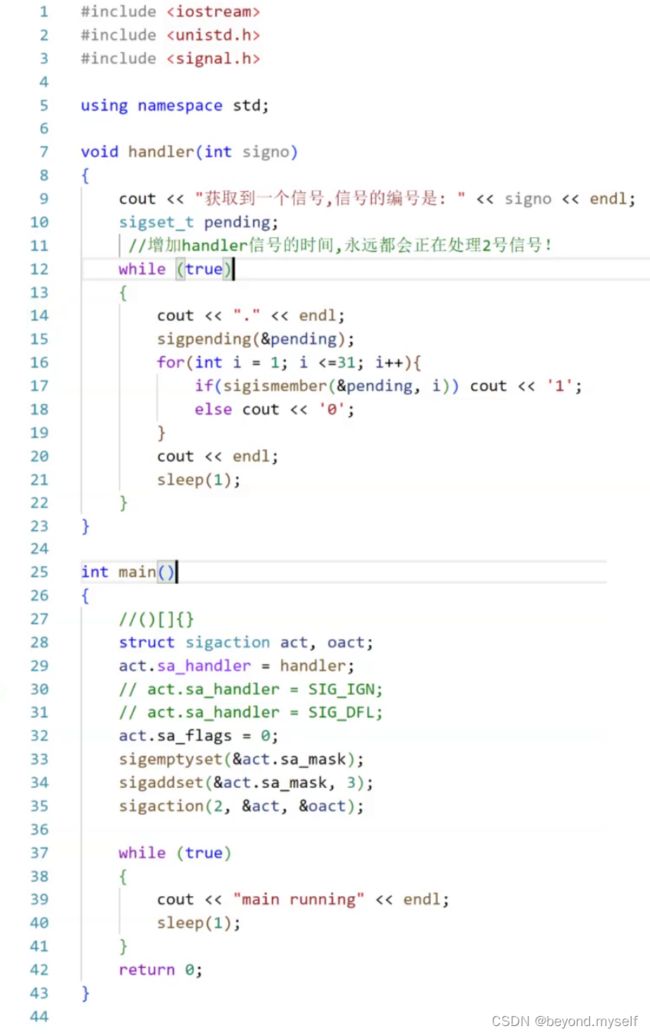
ctrl c后再ctrl c发现2号信号为1,即:阻塞了2号信号。sigaddset(&act.sa_ mask,3) ; 信号集位图中有3号信号,作用是执行2号信号时阻塞了2号信号同时也阻塞3号信号
(3)handler可以配合使用switch语句:
void Handler2()
{
cout << "hello 2" << endl;
}
void Handler3()
{
cout << "hello 3" << endl;
}
void Handler4()
{
cout << "hello 4" << endl;
}
void Handler5()
{
cout << "hello 5" << endl;
}
void Handler(int signo)
{
switch (signo)
{
case 2:
Handler2();
break;
case 3:
Handler3();
break;
case 4:
Handler4();
break;
case 5:
Handler5();
break;
default:
break;
}
}
int main()
{
signal(2, Handler);
signal(3, Handler);
signal(4, Handler);
signal(5, Handler);
while (1)
{
sleep(1);
}
}4.可重入函数
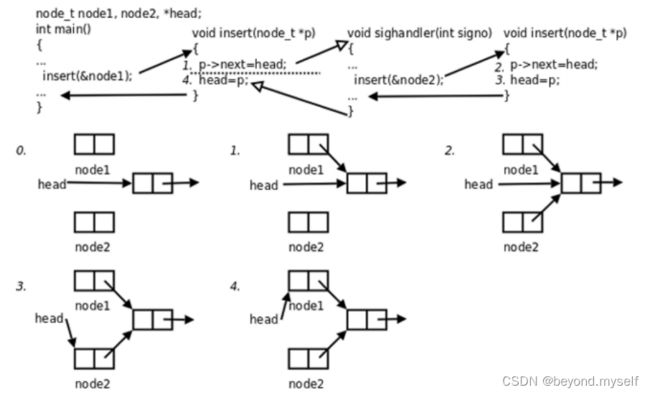
main函数调用insert函数向一个链表head中插入节点node1,插入操作分为两步,刚做完第一步的 时候,因为硬件中断使进程切换到内核,再次回用户态之前检查到有信号待处理,于是切换 到sighandler函 数,sighandler也调用insert函数向同一个链表head中插入节点node2,插入节点node2操作的 两步都做完之后从 sighandler返回内核态,再次回到用户态就从main函数调用的insert函数中继续 往下执行,先前做第一步,之后被打断,现在继续做完第二步。结果是,main函数和sighandler先后 向链表中插入两个节点,而最后只有一个节点node1真正插入链表中了,node2会内存泄漏。
像上例这样,insert函数被不同的控制流程调用,有可能在第一次调用还没返回时就再次进入该函数,这称为重入,insert函数访问一个全局链表,有可能因为重入而造成错乱,即:不能多个执行流调用,被像这样的函数称为 不可重入函数(大部分都是)。反之, 如果一个函数只访问自己的局部变量或参数,在重复被多个执行流调用时不会出现问题,则称为可重入(Reentrant) 函数。(或者此函数中对全局变量进行了原子操作,也是可重入函数<原子操作指的是一次完成,中间不会被打断的操作,表示操作过程是安全的>)想一下,为什么两个不同的控制流程调用同一个函数,访问它的同一个局部变量或参数就不会造成错乱?
5.volatile
作用:保持内存的可见性,读取必须从内存中读
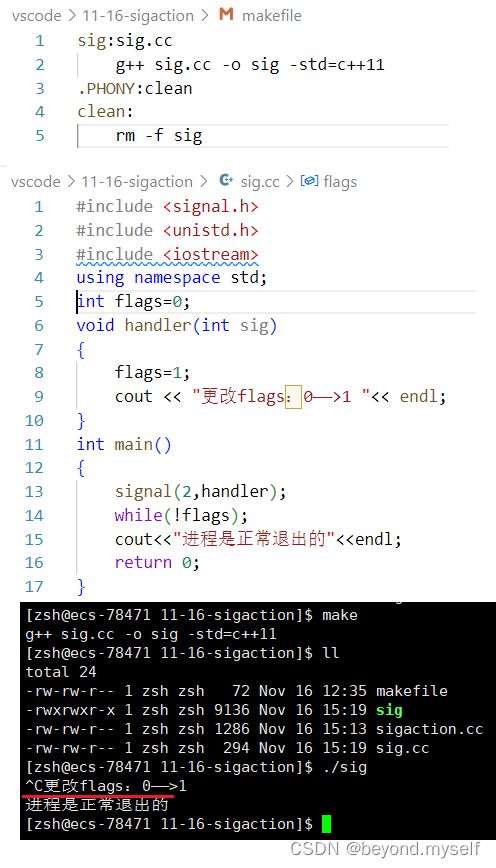
(1)常规情况(无-O2优化,无volatile)
正常makefile中 不加-O2 也不加volatile 是和(2)一样的结果,都能把flags修改而终止进程。
(2)优化情况(有-O2优化,无volatile)
但是makefile加了-O2,表明让编译器优化:因为while(!flags)是位运算,只能CPU处理,而且flags一直在被使用,此时CPU自作主张把内存中的flags放入寄存器中,当我们修改flags=1时,只是修改了内存中的flags,没有影响寄存器中的flags,则ctrl c 时执行处理方法,但是寄存器中的flags不会改变,永远不会终止进程。

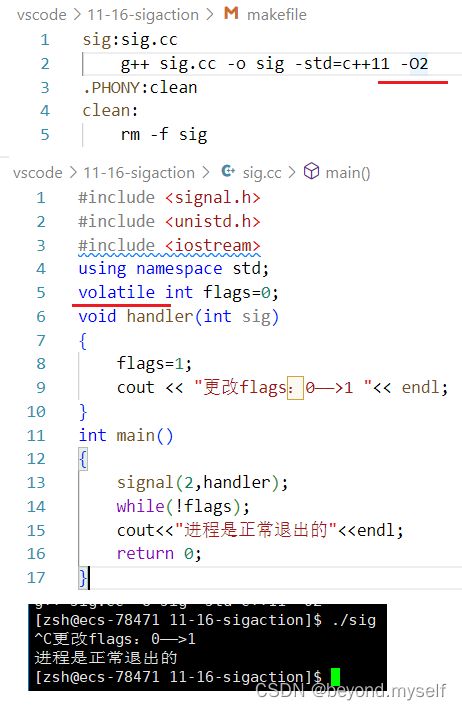
(3)优化+volatile 情况(有-O2优化,有volatile)
volatile:保持内存的可见性,读取必须从内存中读
此时要求CPU每次使用flags只能从内存中拿flags放入寄存器中,这样修改flags就可以终止进程。
(4)volatile关键字可以保证并发编程中的可见性,有序性。
并发编程中通常会遇到三个问题 原子性问题,可见性问题,有序性问题,java/C/C++中volatile关键字可以保证并发编程中的可见性,有序性。
原子性:一个操作不会被打断,要么一次完成,要么不做。
可见性:一个资源被修改后,是否对其他线程是立即可见的(一个变量的修改存在一个过程,将数据从内存加载的cpu寄存器,进行运算,完毕后交还内存,但是这个过程在代码优化中可能会被编译器优化,将数据放入寄存器,则后续运算只从寄存器取数据,就节省了从内存获取数据的时间)
有序性:简单理解,程序按照写代码的先后顺序执行,就是有序的。(编译器有时候会为了提高程序效率进行代码优化,进行指令重排,来提高效率,而有序性就是禁止指令重排)
而volatile关键字的作用是,防止编译器过度优化,因此具备 可见性与有序性 功能
七.SIGCHLD信号
1.子进程在 终止/暂停(stop)/继续运行时 会给父进程发SIGCHLD信号(ctrl+z是19号信号-暂停进程)
测试:
#include
#include
#include
using namespace std;
void handler(int signo)
{
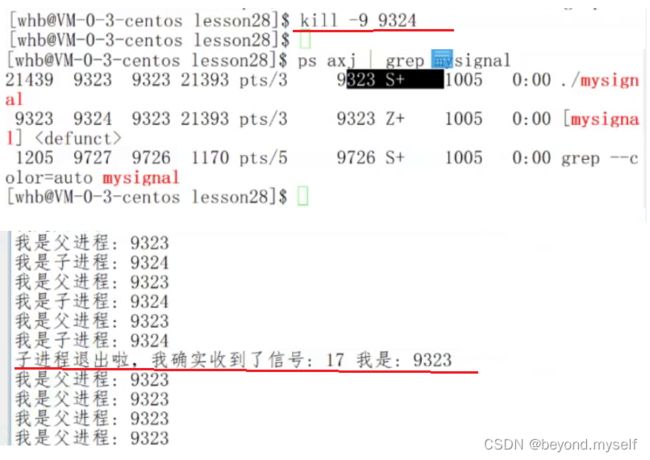
cout << "子进程退出啦,我确实收到了信号: " << signo << " 我是: " << getpid() << endl;
}
int main()
{
signal(SIGCHLD, handler);
pid_t id = fork();
if (id == 0)
{
while (true)
{
cout << "我是子进程: " << getpid() << endl;
sleep(1);
}
exit(0);
}
// parent
while (true)
{
cout << "我是父进程: " << getpid() << endl;
sleep(1);
}
} (1)进程退出会发信号
(2)进程 暂停(stop)/继续运行 会发信号(ctrl+z是19号信号-暂停进程)
进程暂停也就是进程停止状态,进程停止运行,此时进程无法被kill杀死

2.等待的方案
(1)单个子进程退出
等一个进程waitpid的第一个参数就传-1,可以等待任意进程退出就回收
#include
#include
#include
#include
#include
#include
using namespace std;
void FreeChld(int signo)
{
assert(signo==SIGCHLD);
pid_t id=waitpid(-1,nullptr,0);
if(id>0)
{
cout<<"父进程等待成功,chld id:"< 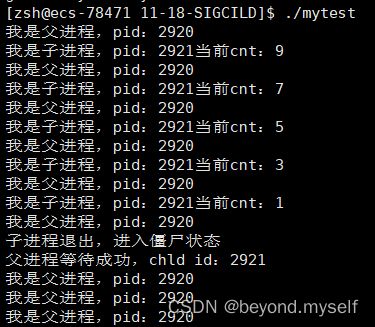
(2)多个子进程同时退出时的等待方案
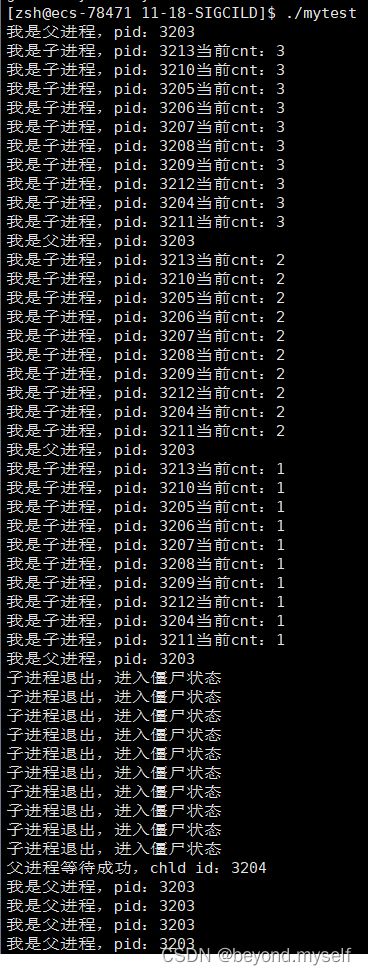
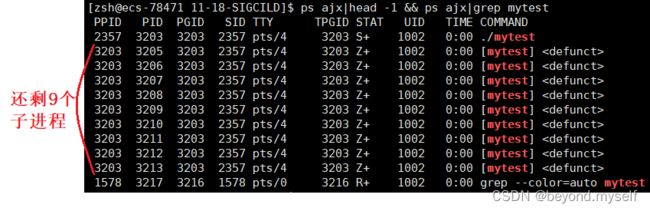
如果10个进程同时退出,在执行方法时会阻塞该信号的多次发出,所以只能捕捉一个信号,导致其他信号丢失,则其他僵尸进程无法捕捉。所以应该给waitpid套一层循环,并加上等待失败的情况。
错误的示例:
这样只等待了一个子进程退出,其他9个全僵尸泄露了
#include
#include
#include
#include
#include
#include
using namespace std;
void FreeChld(int signo)
{
assert(signo == SIGCHLD);
pid_t id = waitpid(-1, nullptr, 0);
if (id > 0)
{
cout << "父进程等待成功,chld id:" << id << endl;
}
}
int main()
{
signal(SIGCHLD, FreeChld);
for (int i = 0; i < 10; i++)
{
pid_t id = fork();
if (id == 0)
{
int cnt = 10;
while (cnt--)
{
cout << "我是子进程,pid:" << getpid() << "当前cnt:" << cnt-- << endl;
sleep(1);
}
cout << "子进程退出,进入僵尸状态" << endl;
exit(0);
}
}
while (1)
{
cout << "我是父进程,pid:" << getpid() << endl;
sleep(1);
}
return 0;
}
处理后的示例:用给waitpid套一层循环即可等待所有子进程退出。
#include
#include
#include
#include
#include
#include
using namespace std;
void FreeChld(int signo)
{
assert(signo == SIGCHLD);
while (true)
{
pid_t id = waitpid(-1, nullptr, 0);
if (id > 0)
{
cout << "父进程等待成功,chld id:" << id << endl;
}
else
{
cout<<"所有子进程已退出"< 
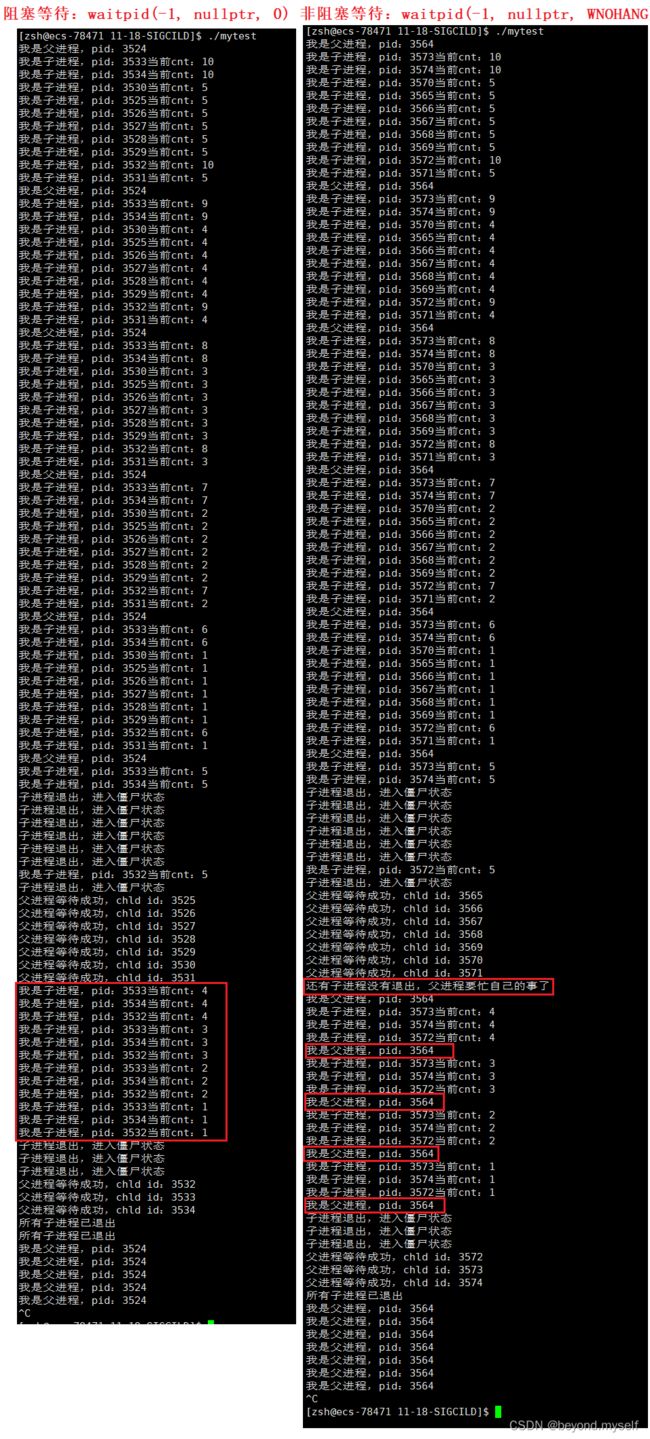
(3)多个子进程不同时退出时的等待方案
子进程退出会给父进程发送SIGCILD,这里10个进程7个子进程5秒后退出,后3个子进程10秒再退出。
若是waitpid(-1,nullptr,0):此时是父进程阻塞等待,那么当前7个子进程退出后,父进程等待成功前7个子进程,此时父进程已经陷入了FreeChld中的循环中了,所以会继续等待,但是后3个仍会运行5秒再退出,这5秒内,父进程会一直阻塞等待,知道这3个子进程退出才会执行waitpid等待成功,这个期间,父进程什么也干不了,一直阻塞着。
若是waitpid(-1,nullptr,WNOHANG):此时是父进程非阻塞等待,那么当前7个子进程退出后,父进程等待成功前7个子进程,此时父进程进入FreeChld中的循环中,所以会继续等待,后3个仍会运行5秒再退出,这三个进程运行期间,父进程是非阻塞等待会通过id==0(等待成功,但子进程没有退出 )这个条件跳出循环去做父进程的事情,直到这3个子进程退出又会发出信号,父进程就会回收这3个子进程。这个期间,父进程可以执行自己的代码,并不阻塞,效率高。
#include
#include
#include
#include
#include
#include
using namespace std;
void FreeChld(int signo)
{
assert(signo == SIGCHLD);
while (true)
{
// -1: 等待任意一个子进程
//当这里是 waitpid(-1, nullptr, 0)时是第一种情况
pid_t id = waitpid(-1, nullptr, WNOHANG);
if (id > 0)
{
cout << "父进程等待成功,chld id:" << id << endl;
}
else if (id == 0) //等待成功,但子进程没有退出
{
cout << "还有子进程没有退出,父进程要忙自己的事了" << endl;
break;
}
else
{ // waitpid 已经没有子进程了调用失败,id<0
cout << "所有子进程已退出" << endl;
break;
}
}
}
int main()
{
signal(SIGCHLD, FreeChld);
for (int i = 0; i < 10; i++)
{
pid_t id = fork();
if (id == 0)
{
int cnt = 0;
if (i < 7)
cnt = 5;
else
cnt = 10;
while (cnt)
{
cout << "我是子进程,pid:" << getpid() << "当前cnt:" << cnt-- << endl;
sleep(1);
}
cout << "子进程退出,进入僵尸状态" << endl;
exit(0);
}
}
while (1)
{
cout << "我是父进程,pid:" << getpid() << endl;
sleep(1);
}
return 0;
}
(4)将SIGCHLD的处理动作置为SIG_IGN——自动释放子进程
下面这个代码:父进程调用sigaction将SIGCHLD的处理动作置为SIG_IGN,这样fork出来的子进程在终止时会自动清理掉,不会产生僵尸进程,也不会通知父进程。
signal(SIGCHLD, FreeChld);
子进程退出的时候,默认的信号处理就是忽略,那调用signal/sigaction手动设置SIG_IGN, 意义在哪里呢?
答:SIG_IGN手动设置:操作系统自动设置:让子进程退出不要给父进程发送信号了,并且自动释放,子进程不会僵尸
#include
#include
#include
#include
#include
#include
#include
using namespace std;
int main()
{
// signal(SIGCHLD, FreeChld);
// 子进程退出的时候,默认的信号处理就是忽略吗?
// 调用signal/sigaction SIG_IGN, 意义在哪里呢?
// SIG_IGN手动设置,让子进程退出,不要给父进程发送信号了,并且自动释放
signal(SIGCHLD, SIG_IGN);
for (int i = 0; i < 10; i++)
{
pid_t id = fork();
if (id == 0)
{
//子进程
int cnt = 3;
// if (i < 7)
// cnt = 5;
// else
// cnt = 20;
while (cnt)
{
cout << "我是子进程, pid: " << getpid() << " 当前的cnt: " << cnt-- << endl;
sleep(1);
}
cout << "子进程退出,进入僵尸状态" << endl;
exit(0);
}
// sleep(1);
}
while (true)
{
cout << "我是父进程,我正在运行: " << getpid() << endl;
sleep(1);
}
// //父进程,都是要自己主动等待
// if(waitpid(id, nullptr, 0) > 0)
// {
// cout << "父进程等待子进程成功" << endl;
// }
return 0;
} 