树莓派ROS stm32 slam Freertos VFH+A*避障路径规划-智能平衡计划(七)
基于树莓派ROSstm32搭载Freertos智能平衡车Day7
- 前言
- 通信功能分析及ESP32模块介绍
- 上位机APP
- ESP32介绍
-
- ESP32 AT指令
-
- WIFI 相关的 AT指令
- ESP32 多连接 TCP 服务器使用
- ESP32 BLE相关AT指令
-
- ESP32 基于 BLE 连接的应用
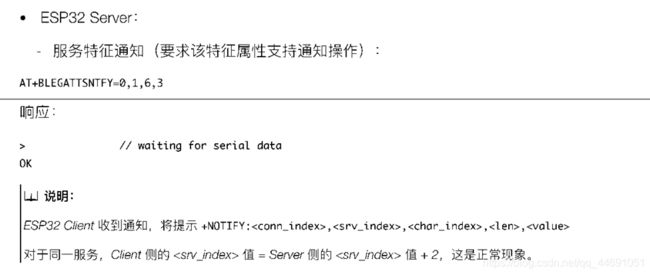
- BLE服务器发送数据
- BLE客户端发送数据
- ESP32模块驱动讲解
-
- ESP32 电气连接原理图
- 上位机通信协议实现
-
- 通信协议的制定——上位机发送数据
- 通信协议的制定——上位机接收数据
- 二、start!代码
- 总结
前言
交互进程的实现用ESP32,实现交互进程
提示:以下是本篇文章正文内容,下面案例可供参考
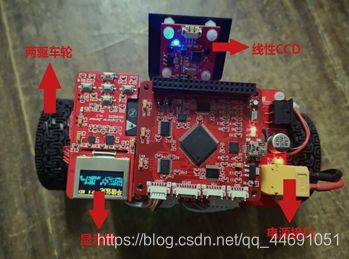
通信功能分析及ESP32模块介绍

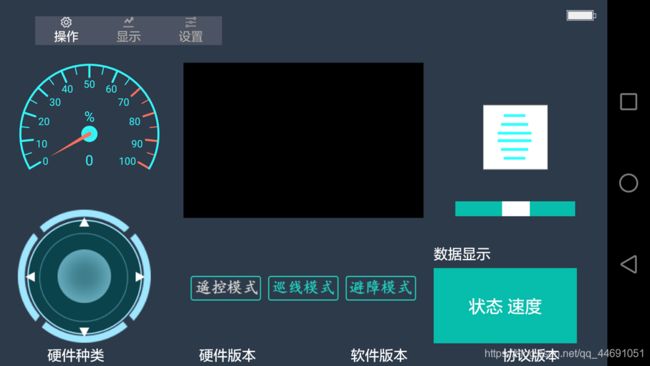
上位机APP
![]()



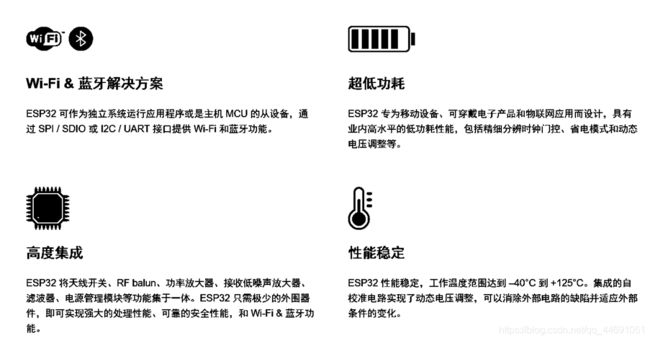
ESP32介绍

官网:https://www.espressif.com/zh-hans/products/hardware/modules
ESP32 AT指令

WIFI 相关的 AT指令

ESP32 多连接 TCP 服务器使用



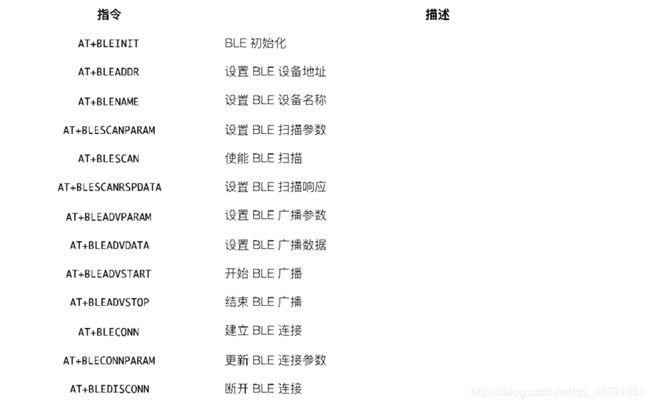
ESP32 BLE相关AT指令
ESP32 基于 BLE 连接的应用



BLE服务器发送数据
BLE客户端发送数据

ESP32模块驱动讲解
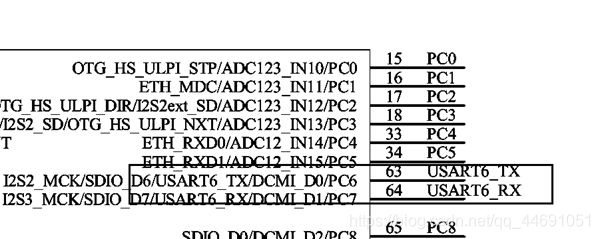
ESP32 电气连接原理图

上位机通信协议实现
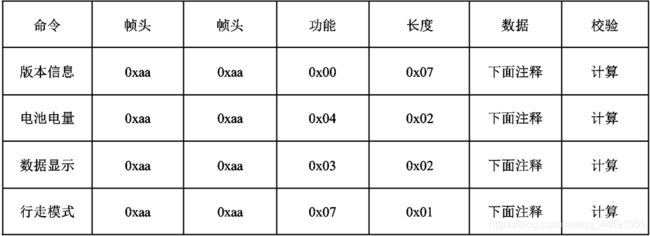
通信协议的制定——上位机发送数据



通信协议的制定——上位机接收数据

二、start!代码
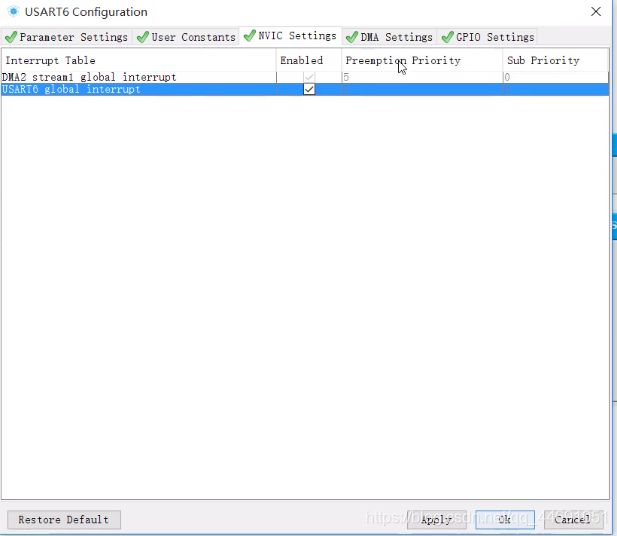
由于是不定长的数据所以要配置为DMA模式

中断也要打开
esp32.c
#include "esp32.h"
#include "usart.h"
#include esp32.h
#ifndef __ESP32_H
#define __ESP32_H
#include freertos.c
/**
******************************************************************************
* File Name : freertos.c
* Description : Code for freertos applications
******************************************************************************
* This notice applies to any and all portions of this file
* that are not between comment pairs USER CODE BEGIN and
* USER CODE END. Other portions of this file, whether
* inserted by the user or by software development tools
* are owned by their respective copyright owners.
*
* Copyright (c) 2018 STMicroelectronics International N.V.
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted, provided that the following conditions are met:
*
* 1. Redistribution of source code must retain the above copyright notice,
* this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright notice,
* this list of conditions and the following disclaimer in the documentation
* and/or other materials provided with the distribution.
* 3. Neither the name of STMicroelectronics nor the names of other
* contributors to this software may be used to endorse or promote products
* derived from this software without specific written permission.
* 4. This software, including modifications and/or derivative works of this
* software, must execute solely and exclusively on microcontroller or
* microprocessor devices manufactured by or for STMicroelectronics.
* 5. Redistribution and use of this software other than as permitted under
* this license is void and will automatically terminate your rights under
* this license.
*
* THIS SOFTWARE IS PROVIDED BY STMICROELECTRONICS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS, IMPLIED OR STATUTORY WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A
* PARTICULAR PURPOSE AND NON-INFRINGEMENT OF THIRD PARTY INTELLECTUAL PROPERTY
* RIGHTS ARE DISCLAIMED TO THE FULLEST EXTENT PERMITTED BY LAW. IN NO EVENT
* SHALL STMICROELECTRONICS OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA,
* OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF
* LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING
* NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "FreeRTOS.h"
#include "task.h"
#include "cmsis_os.h"
/* USER CODE BEGIN Includes */
#include "main.h"
#include "stm32f4xx_hal.h"
#include "mpu6050.h"
#include "car_task.h"
#include "inv_mpu_user.h"
#include "esp32.h"
#include "connect.h"
/* USER CODE END Includes */
/* Variables -----------------------------------------------------------------*/
osThreadId Task_200HZHandle;
osThreadId Task_100HZHandle;
osThreadId Task_5HZHandle;
osThreadId Task_InteractioHandle;
/* USER CODE BEGIN Variables */
#define Message_Q_NUM 5
#define Message_Q_Length sizeof(tEsp32_RcvBuf)
xQueueHandle Message_Queue;
tEsp32_RcvBuf Uart6_Rcv;
/* USER CODE END Variables */
/* Function prototypes -------------------------------------------------------*/
void StartTask_200HZ(void const * argument);
void StartTask_100HZ(void const * argument);
void StartTask_5HZ(void const * argument);
void StartTask_Interaction(void const * argument);
void MX_FREERTOS_Init(void); /* (MISRA C 2004 rule 8.1) */
/* USER CODE BEGIN FunctionPrototypes */
/* USER CODE END FunctionPrototypes */
/* Hook prototypes */
/* Init FreeRTOS */
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* Create the thread(s) */
/* definition and creation of Task_200HZ */
osThreadDef(Task_200HZ, StartTask_200HZ, osPriorityNormal, 0, 128);
Task_200HZHandle = osThreadCreate(osThread(Task_200HZ), NULL);
/* definition and creation of Task_100HZ */
osThreadDef(Task_100HZ, StartTask_100HZ, osPriorityIdle, 0, 128);
Task_100HZHandle = osThreadCreate(osThread(Task_100HZ), NULL);
/* definition and creation of Task_5HZ */
osThreadDef(Task_5HZ, StartTask_5HZ, osPriorityIdle, 0, 128);
Task_5HZHandle = osThreadCreate(osThread(Task_5HZ), NULL);
/* definition and creation of Task_Interactio */
osThreadDef(Task_Interactio, StartTask_Interaction, osPriorityIdle, 0, 128*5);
Task_InteractioHandle = osThreadCreate(osThread(Task_Interactio), NULL);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
}
/* StartTask_200HZ function */
void StartTask_200HZ(void const * argument)
{
/* USER CODE BEGIN StartTask_200HZ */
//printf("环境采集进程运行\n");
MPU_Init();
while(mpu_dmp_init());
/* Infinite loop */
for(;;)
{
Car_Task_200HZ();
osDelay(5);
}
/* USER CODE END StartTask_200HZ */
}
/* StartTask_100HZ function */
void StartTask_100HZ(void const * argument)
{
/* USER CODE BEGIN StartTask_100HZ */
//printf("PID控制进程运行\n");
/* Infinite loop */
for(;;)
{
Car_Task_100HZ();
osDelay(10);
}
/* USER CODE END StartTask_100HZ */
}
/* StartTask_5HZ function */
void StartTask_5HZ(void const * argument)
{
/* USER CODE BEGIN StartTask_5HZ */
//printf("菜单显示进程运行\n");
/* Infinite loop */
for(;;)
{
Car_Task_5HZ();
osDelay(500);
}
/* USER CODE END StartTask_5HZ */
}
/* StartTask_Interaction function */
void StartTask_Interaction(void const * argument)
{
/* USER CODE BEGIN StartTask_Interaction */
uint8_t time = 0;
printf("交互进程运行\n");
Message_Queue = xQueueCreate ( Message_Q_NUM, Message_Q_Length );
HAL_UART_Receive_DMA(&huart6, Uart6_Rcv.RcvBuf, 255);
__HAL_UART_ENABLE_IT(&huart6,UART_IT_IDLE );
ESP32_Init();
/* Infinite loop */
for(;;)
{
ESP32_Data_Rcv();
time++;
if(time >= 50)
{
time = 0;
Connect_Send_data(READ_ALL_ARG);
}
osDelay(10);
}
/* USER CODE END StartTask_Interaction */
}
/* USER CODE BEGIN Application */
/* USER CODE END Application */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
中断函数
/**
******************************************************************************
* @file stm32f4xx_it.c
* @brief Interrupt Service Routines.
******************************************************************************
*
* COPYRIGHT(c) 2018 STMicroelectronics
*
* Redistribution and use in source and binary forms, with or without modification,
* are permitted provided that the following conditions are met:
* 1. Redistributions of source code must retain the above copyright notice,
* this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright notice,
* this list of conditions and the following disclaimer in the documentation
* and/or other materials provided with the distribution.
* 3. Neither the name of STMicroelectronics nor the names of its contributors
* may be used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
* DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE
* FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
* DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
* SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
* CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
* OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "stm32f4xx_hal.h"
#include "stm32f4xx.h"
#include "stm32f4xx_it.h"
#include "cmsis_os.h"
/* USER CODE BEGIN 0 */
#include "car_task.h"
#include "esp32.h"
#include "string.h"
extern xQueueHandle Message_Queue;
extern tEsp32_RcvBuf Uart6_Rcv;
/* USER CODE END 0 */
/* External variables --------------------------------------------------------*/
extern TIM_HandleTypeDef htim7;
extern DMA_HandleTypeDef hdma_usart3_rx;
extern DMA_HandleTypeDef hdma_usart6_rx;
extern UART_HandleTypeDef huart3;
extern UART_HandleTypeDef huart6;
extern TIM_HandleTypeDef htim6;
/******************************************************************************/
/* Cortex-M4 Processor Interruption and Exception Handlers */
/******************************************************************************/
/**
* @brief This function handles Non maskable interrupt.
*/
void NMI_Handler(void)
{
/* USER CODE BEGIN NonMaskableInt_IRQn 0 */
/* USER CODE END NonMaskableInt_IRQn 0 */
/* USER CODE BEGIN NonMaskableInt_IRQn 1 */
/* USER CODE END NonMaskableInt_IRQn 1 */
}
/**
* @brief This function handles Hard fault interrupt.
*/
void HardFault_Handler(void)
{
/* USER CODE BEGIN HardFault_IRQn 0 */
/* USER CODE END HardFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_HardFault_IRQn 0 */
/* USER CODE END W1_HardFault_IRQn 0 */
}
/* USER CODE BEGIN HardFault_IRQn 1 */
/* USER CODE END HardFault_IRQn 1 */
}
/**
* @brief This function handles Memory management fault.
*/
void MemManage_Handler(void)
{
/* USER CODE BEGIN MemoryManagement_IRQn 0 */
/* USER CODE END MemoryManagement_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_MemoryManagement_IRQn 0 */
/* USER CODE END W1_MemoryManagement_IRQn 0 */
}
/* USER CODE BEGIN MemoryManagement_IRQn 1 */
/* USER CODE END MemoryManagement_IRQn 1 */
}
/**
* @brief This function handles Pre-fetch fault, memory access fault.
*/
void BusFault_Handler(void)
{
/* USER CODE BEGIN BusFault_IRQn 0 */
/* USER CODE END BusFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_BusFault_IRQn 0 */
/* USER CODE END W1_BusFault_IRQn 0 */
}
/* USER CODE BEGIN BusFault_IRQn 1 */
/* USER CODE END BusFault_IRQn 1 */
}
/**
* @brief This function handles Undefined instruction or illegal state.
*/
void UsageFault_Handler(void)
{
/* USER CODE BEGIN UsageFault_IRQn 0 */
/* USER CODE END UsageFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_UsageFault_IRQn 0 */
/* USER CODE END W1_UsageFault_IRQn 0 */
}
/* USER CODE BEGIN UsageFault_IRQn 1 */
/* USER CODE END UsageFault_IRQn 1 */
}
/**
* @brief This function handles Debug monitor.
*/
void DebugMon_Handler(void)
{
/* USER CODE BEGIN DebugMonitor_IRQn 0 */
/* USER CODE END DebugMonitor_IRQn 0 */
/* USER CODE BEGIN DebugMonitor_IRQn 1 */
/* USER CODE END DebugMonitor_IRQn 1 */
}
/**
* @brief This function handles System tick timer.
*/
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
/* USER CODE END SysTick_IRQn 0 */
osSystickHandler();
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
/******************************************************************************/
/* STM32F4xx Peripheral Interrupt Handlers */
/* Add here the Interrupt Handlers for the used peripherals. */
/* For the available peripheral interrupt handler names, */
/* please refer to the startup file (startup_stm32f4xx.s). */
/******************************************************************************/
/**
* @brief This function handles EXTI line1 interrupt.
*/
void EXTI1_IRQHandler(void)
{
/* USER CODE BEGIN EXTI1_IRQn 0 */
/* USER CODE END EXTI1_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_1);
/* USER CODE BEGIN EXTI1_IRQn 1 */
/* USER CODE END EXTI1_IRQn 1 */
}
/**
* @brief This function handles DMA1 stream1 global interrupt.
*/
void DMA1_Stream1_IRQHandler(void)
{
/* USER CODE BEGIN DMA1_Stream1_IRQn 0 */
/* USER CODE END DMA1_Stream1_IRQn 0 */
HAL_DMA_IRQHandler(&hdma_usart3_rx);
/* USER CODE BEGIN DMA1_Stream1_IRQn 1 */
/* USER CODE END DMA1_Stream1_IRQn 1 */
}
/**
* @brief This function handles USART3 global interrupt.
*/
void USART3_IRQHandler(void)
{
/* USER CODE BEGIN USART3_IRQn 0 */
/* USER CODE END USART3_IRQn 0 */
HAL_UART_IRQHandler(&huart3);
/* USER CODE BEGIN USART3_IRQn 1 */
/* USER CODE END USART3_IRQn 1 */
}
/**
* @brief This function handles TIM6 global interrupt, DAC1 and DAC2 underrun error interrupts.
*/
void TIM6_DAC_IRQHandler(void)
{
/* USER CODE BEGIN TIM6_DAC_IRQn 0 */
/* USER CODE END TIM6_DAC_IRQn 0 */
HAL_TIM_IRQHandler(&htim6);
/* USER CODE BEGIN TIM6_DAC_IRQn 1 */
/* USER CODE END TIM6_DAC_IRQn 1 */
}
/**
* @brief This function handles TIM7 global interrupt.
*/
void TIM7_IRQHandler(void)
{
/* USER CODE BEGIN TIM7_IRQn 0 */
/* USER CODE END TIM7_IRQn 0 */
HAL_TIM_IRQHandler(&htim7);
/* USER CODE BEGIN TIM7_IRQn 1 */
/* USER CODE END TIM7_IRQn 1 */
}
/**
* @brief This function handles DMA2 stream1 global interrupt.
*/
void DMA2_Stream1_IRQHandler(void)
{
/* USER CODE BEGIN DMA2_Stream1_IRQn 0 */
/* USER CODE END DMA2_Stream1_IRQn 0 */
HAL_DMA_IRQHandler(&hdma_usart6_rx);
/* USER CODE BEGIN DMA2_Stream1_IRQn 1 */
/* USER CODE END DMA2_Stream1_IRQn 1 */
}
/**
* @brief This function handles USART6 global interrupt.
*/
void USART6_IRQHandler(void)
{
/* USER CODE BEGIN USART6_IRQn 0 */
portBASE_TYPE pxHigherPriorityTaskWoken;
if(__HAL_UART_GET_FLAG(&huart6, UART_FLAG_IDLE) == SET)
{
__HAL_UART_CLEAR_FLAG(&huart6, UART_FLAG_IDLE);
HAL_UART_DMAStop(&huart6);
Uart6_Rcv.DataLen = 255 - hdma_usart6_rx.Instance->NDTR;
xQueueSendFromISR (Message_Queue, &Uart6_Rcv, &pxHigherPriorityTaskWoken);
memset(&Uart6_Rcv, 0, sizeof(Uart6_Rcv));
}
/* USER CODE END USART6_IRQn 0 */
HAL_UART_IRQHandler(&huart6);
/* USER CODE BEGIN USART6_IRQn 1 */
HAL_UART_Receive_DMA(&huart6, Uart6_Rcv.RcvBuf, 255);
/* USER CODE END USART6_IRQn 1 */
}
/* USER CODE BEGIN 1 */
uint8_t ECHO_IRQ_FLAG = 0;
uint8_t time_cnt = 0;
static int last_distence =0 ;
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
int time = 0;
if(GPIO_Pin == GPIO_PIN_1 )
{
if(ECHO_IRQ_FLAG == 0) //上升沿中断
{
ECHO_IRQ_FLAG = 1;
time_cnt = 0;
TIM7->CNT =0;
HAL_TIM_Base_Start_IT(&htim7); //启动定时器,开始计时
}
else //下降沿中断
{
ECHO_IRQ_FLAG = 0;
HAL_TIM_Base_Stop_IT(&htim7); //关闭定时器,计时完毕
time = (time_cnt*1000 + TIM7->CNT) /2 ; //统计声音单次传播的时间
Distence = 34000 * time /1000000; //计算距离
//过滤掉可能出现0这种错误情况
if(Distence == 0) Distence = last_distence;
else last_distence = Distence;
}
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART3)
{
HAL_UART_Receive_DMA(&huart3, (uint8_t *)&CCD, sizeof(CCD));
}
}
/* USER CODE END 1 */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
cartask.c
#include "car_task.h"
#include "mpu6050.h"
#include "inv_mpu_user.h"
#include "contrl.h"
int FS_MODE = 0 ; //0、遥控模式 1、蔽障模式 2、巡线模式
int Balance_Pwm,Velocity_Pwm,Turn_Pwm; //PID计算的PWM值
int Motor1, Motor2; //左右电机PWM值
int Encoder_left, Encoder_right; //检测速度
float Movement = 0; //速度调节
int Contrl_Turn = 64; //转向调节变量
int Distence ; //小车和前方障碍物之间的距离
struct tCCD CCD; //摄像头的数据
//环境数据采集任务
void Car_Task_200HZ(void)
{
static struct mpu6050_data Last_Data;
if(mpu_dmp_get_data() !=0 )
OutMpu = Last_Data;
else
Last_Data = OutMpu;
}
void Car_Task_100HZ(void)
{
//启动超声波模块检测
HC_SRC04_Start();
Encoder_left = Read_Encoder(1);
Encoder_right = -Read_Encoder(2);
//1、确定直立环PWM
Balance_Pwm = Vertical_Ring_PD(OutMpu.pitch, OutMpu.gyro_x);
//2、确定速度环PWM
Velocity_Pwm = Vertical_speed_PI(Encoder_left,Encoder_right,OutMpu.pitch, Movement );
//3、确定转向环PWM
if(FS_MODE == 0) //遥控模式
Turn_Pwm = Vertical_turn_PD(Contrl_Turn, OutMpu.gyro_z);
else if(FS_MODE == 1) //蔽障模式
{
if(Distence < 20)
Turn_Pwm = Vertical_turn_PD(20, OutMpu.gyro_z);
else
Turn_Pwm = 0;
}
else if(FS_MODE == 2) //巡线模式
{
Turn_Pwm = Vertical_turn_PD(CCD.middle, OutMpu.gyro_z);
}
//4、确定最终左右电机的PWM
Motor1 = Balance_Pwm + Velocity_Pwm + Turn_Pwm;
Motor2 = Balance_Pwm + Velocity_Pwm - Turn_Pwm;
PWM_Limiting(&Motor1,&Motor2);
//5、设置电机
Set_PWM(Motor1,Motor2);
}
void Car_Task_5HZ(void)
{
// printf("acc_x = %d\n",OutMpu.acc_x);
// printf("acc_y = %d\n",OutMpu.acc_y);
// printf("acc_z = %d\n",OutMpu.acc_z);
// printf("gyro_x = %d\n",OutMpu.gyro_x);
// printf("gyro_y = %d\n",OutMpu.gyro_y);
// printf("gyro_z = %d\n",OutMpu.gyro_z);
// printf("pitch = %f\n",OutMpu.pitch);
// printf("roll = %f\n",OutMpu.roll);
// printf("yaw = %f\n",OutMpu.yaw);
// printf("Encoder_left = %d\n",Encoder_left);
// printf("Encoder_left = %d\n",Encoder_right);
// printf("Distence = %d\n",Distence);
printf("CCD.left = %d\n",CCD.left);
printf("CCD.right = %d\n",CCD.right);
printf("CCD.middle = %d\n",CCD.middle);
printf("CCD.threshold = %d\n",CCD.threshold);
printf("\r\n");
}
//启动超声波检测
void HC_SRC04_Start(void)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
delay_us(20);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);
}
cartask.h
#ifndef __CAR_TASK_H
#define __CAR_TASK_H
#include "stm32f4xx_hal.h"
extern int FS_MODE ; //0、遥控模式 1、蔽障模式 2、巡线模式
extern int Balance_Pwm,Velocity_Pwm,Turn_Pwm; //PID计算的PWM值
extern int Motor1, Motor2; //左右电机PWM值
extern int Encoder_left, Encoder_right; //检测速度
extern float Movement ; //速度调节
extern int Contrl_Turn ; //转向调节变量
extern int Distence ; //小车和前方障碍物之间的距离
struct mpu6050_data{
short acc_x;
short acc_y;
short acc_z;
short gyro_x;
short gyro_y;
short gyro_z;
float pitch; //俯仰角
float roll; //翻滚角
float yaw; //偏航角
};
extern struct mpu6050_data OutMpu;
struct tCCD
{
uint16_t middle; //中间位置值
uint16_t threshold; //像素ad阈值
uint16_t left; //左跳变的位置
uint16_t right; //右跳变的位置
};
extern struct tCCD CCD;
extern int Distence ; //小车和前方障碍物之间的距离
void Car_Task_200HZ(void);
void Car_Task_100HZ(void);
void Car_Task_5HZ(void);
void HC_SRC04_Start(void);
#endif
总结
以上为APP和平衡车之间的交互,等所有工程实现完毕,会在最后一篇博客上放入源码链接