【STM32Cube】学习笔记(一):光敏传感器
文章目录
- 前言
- 一、光敏传感器是什么?
- 二、硬件电路设计
- 三、软件设计
-
- 1.CubeMX配置
- 2.CubeIDE代码
- 3.结果显示
- 总结
- 附录
前言
本篇文章用STM32CubeMX和STM32CubeIDE软件编程,主控芯片为STM32F407ZGT6驱动光敏传感器。通过该传感器可以感知周围环境光线的变化,从而可以实现类似自动背光控制的应用。通过本文可以初步学会使用定时器触发ADC数据采集与处理的功能。
所用工具:
1、芯片: STM32F407ZGT6
2、驱动设备:光敏传感器
3、配置软件:STM32CubeMx
4、IDE: STM32CubeIDE
知识概括:
通过本篇文章您将学到:
光敏传感器原理
ADC采集数据
定时器设置
UART发送数据
一、光敏传感器是什么?
光敏传感器是利用光敏元件将光信号转换为电信号的传感器。它的敏感波长在可见光波长附近,包括红外线波长和紫外线波长。光传感器不只局限于对光的探测,它还可以作为探测元件组成其他传感器,对许多非电量进行检测,只要将这些非电量转换为光信号的变化即可。
光敏二极管也叫光电二极管。光敏二极管与半导体二极管在结构上是类似的,其管芯是一个具有光敏特征的 PN 结,具有单向导电性,因此工作时需加上反向电压。无光照时,有很小的饱和反向漏电流,即暗电流,此时光敏二极管截止。当受到光照时,饱和反向漏电流大大增加,形成光电流,它随入射光强度的变化而变化。当光线照射 PN 结时,可以使 PN 结中产生电子一空穴对,使少数载流子的密度增加。这些载流子在反向电压下漂移,使反向电流增加。因此可以利用光照强弱来改变电路中的电流。
利用这个电流变化,我们串接一个电阻,就可以转换成电压的变化,从而通过 ADC 读取电压值,判断外部光线的强弱。
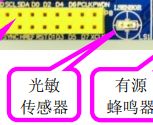
本篇文章利用ADC3的通道5来读取光敏二极管电压的变化,从而得到环境光线的变化,并将得到的光线强度,显示在TFTLCD上面。光敏传感器如图1所示。
二、硬件电路设计
光敏传感器只需要一个IO口连接至光敏二极管的正极,本文使用ADC3的通道5(PF7)来采集光敏传感器的光照强度,其电路连接图如图2所示。

当环境光线变化时,LS1 两端的电压也会随之改变,从而通过 ADC3_IN5 通道,读取光敏传感器上面的电压,即可得到环境光线的强弱。光线越强,电压越低,光线越暗,电压越高。
三、软件设计
1.CubeMX配置
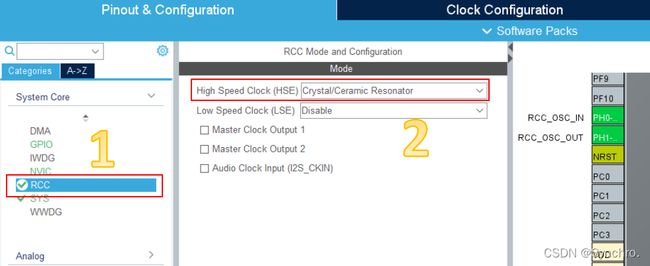
(1) 时钟配置
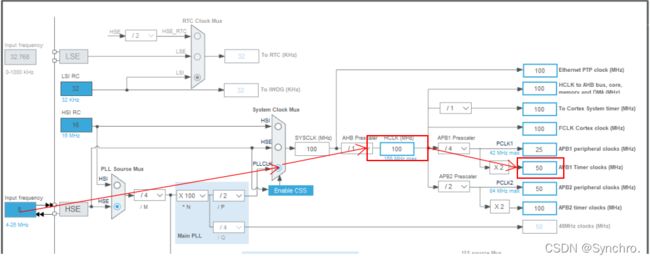
如图3,4分别为设置HSE(高速外部时钟)以及时钟树的配置。选定HSE之后芯片会自动选定两个引脚用来连接外部晶振,如图3所示。设置LSE之后配置时钟树,查数据手册可知本次使用的TIM3定时器是挂载在APB1总线上的,为保证其最终结果输出为整数,将APB1总线定时器时钟信号频率为50MHz,因此设置HCLK为100MHz,其配置图如图4所示。
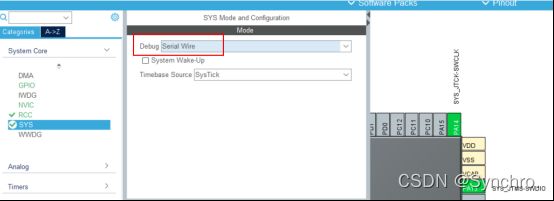
(2) 调试接口配置
如图5所示,将调试接口设置的设置为SW模式,占用芯片两个引脚。
(3) 定时器配置
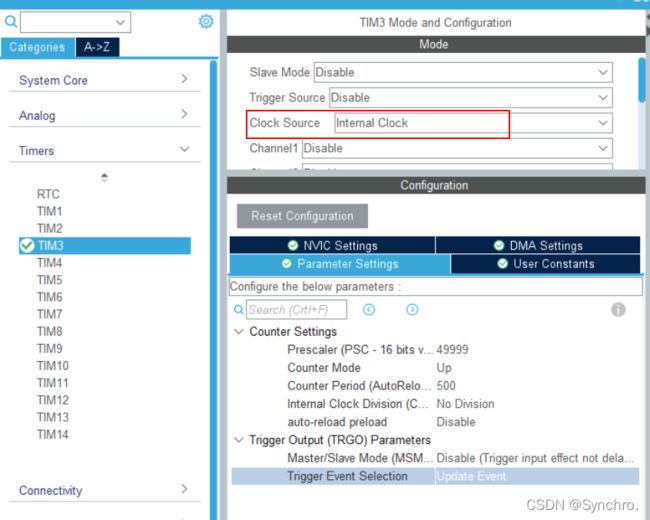
为方便计算定时器的分频系数和定时周期,已将APB1设置为50MHz。先设置TIM3为内部时钟源,在图6的参数设置中设置预分频为49999,通过计算分频器输出的时钟信号频率为1000Hz,计数周期为500,所以TIM3定时器没500ms产生一次计数溢出。触发事件选择设置为Update Event,也就是以UEV事件信号为TRGO信号。
(4) ADC配置
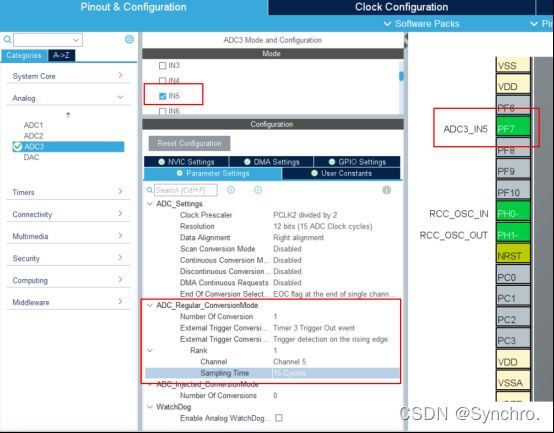
ADC3的输入通道选择IN5,参数部分设计如图6所示,其中外部触发源的设置为主要对象。将外部触发源设置为TIM3 Trigger Out event,也就是定时器TIM3的TRGO信号,将触发转换跳变沿设置为上跳沿,因为TRGO是一个短时正脉冲信号。设置完成之后会自动引出PF7引脚。
这样,ADC3在TIM3的TRGO信号的每个上跳沿启动一次ADC转换,就可以实现周期性ADC转换,转换周期由TIM3的定时周期决定,无须开启TIM3的全局中断,TRGO信号也是正常输出。
(5) UART配置
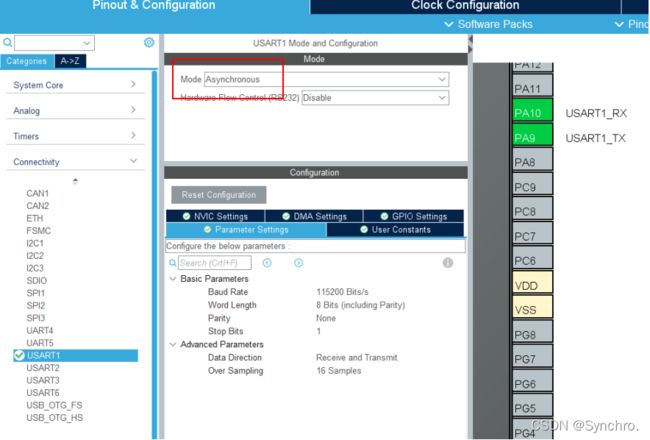
为显示结果,用串口将转换结果传到电脑上,设置为异步模式,波特率为115200Bits/s,其UART配置如下图8所示。设置完成之后会自动引出两个引脚用于串口通信。
(6)中断设置
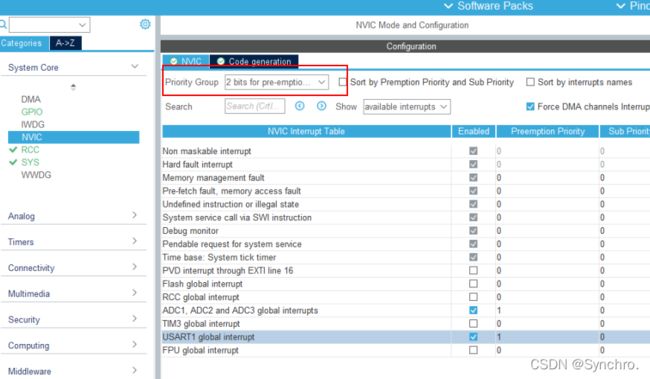
中断配置如图9所示,设置优先级分组为2位抢占2位次级,设置UART和ADC优先级低于基础时钟。
(7)保存
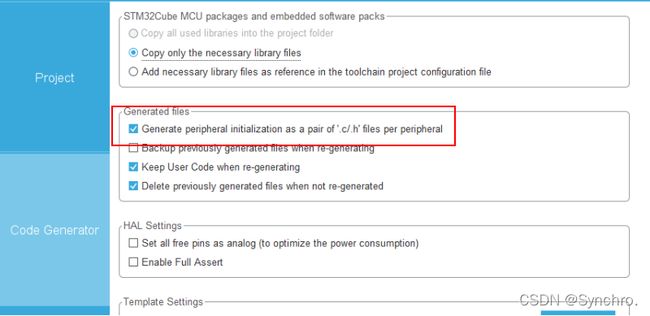
在ProjectManager中设置如如图10,11所示,设置集成开发环境为STM32CubeIDE。

2.CubeIDE代码
相关配置文件不做过多解释,以下只展示添加的代码段以及相应的用法,其他代码均不用动·。
(1) 头文件
作用:使用打印函数printf。
位置:位于/* USER CODE BEGIN Includes */沙箱内。
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "stdlib.h"
/* USER CODE END Includes */
(1) UART重定向
作用:使结果通过串口定向输出到屏幕上(通用代码)。
位置:位于/* USER CODE BEGIN 0 */沙箱内。
/* USER CODE BEGIN 0 */
//重定向
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
/* USER CODE END 0 */
(3) 开启ADC与TIM
作用:开启ADC3中断以及TIM3定时器。
位置:位于/* USER CODE BEGIN 2 */沙箱内。
/* USER CODE BEGIN 2 */
HAL_ADC_Start_IT(&hadc3); //开启ADC3中断
HAL_TIM_Base_Start(&htim3); //开启TIM3定时器
/* USER CODE END 2 */
(4) 写ADC中断回调函数
作用:ADC3在TIM3的TRGO信号的每个上跳沿启动一次ADC转换,就可以实现周期性ADC转换。
位置:位于/* USER CODE BEGIN 4 */沙箱内。
/* USER CODE BEGIN 4 */
uint32_t val;
uint16_t LSENS;
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* adcHandle)
{
if(adcHandle->Instance==ADC3)
{
val=HAL_ADC_GetValue(&hadc3); //读取常规通道转换结果寄存器的数据
LSENS=100-(val/40); //计算,使得光强落在0-100之间
}
printf("Light intensity: %d\r\n",LSENS);
}
/* USER CODE END 4 */
附:ADC相关HAL函数

3.结果显示
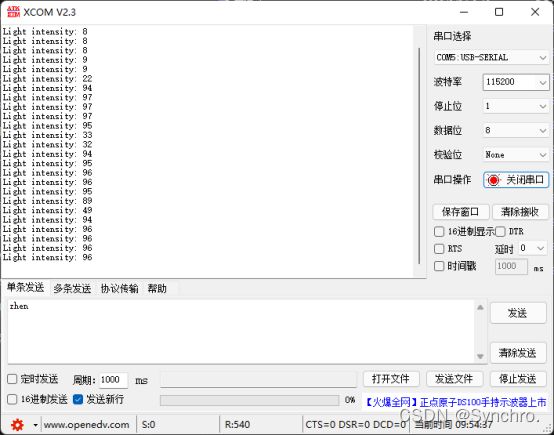
通过串口连接至上位机,显示结果如图12所示,改变不同的光照强度其显示为不同的结果,光照强度与光照值成正比(光照强度越强,光照值越高)。
总结
本篇文章只是定时器和ADC的简单应用,通过本次试验可以清楚地了解到ADC采集数据的过程。代码虽然简单但是很通用,适用于其他传感器。可以在代码上进行拓展,加入一些均值算法,得到较为平稳的值。本次设计参考正点原子探索者开发板以及STM32Cube高效开发教程。
附录
完整代码:
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "stdlib.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//重定向
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ADC3_Init();
MX_TIM3_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_ADC_Start_IT(&hadc3); //开启ADC3中断
HAL_TIM_Base_Start(&htim3); //开启TIM3定时器
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 100;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
uint32_t val;
uint16_t LSENS;
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* adcHandle)
{
if(adcHandle->Instance==ADC3)
{
val=HAL_ADC_GetValue(&hadc3); //读取常规通道转换结果寄存器的数据
LSENS=100-(val/40); //计算,使得光强落在0-100之间
}
printf("Light intensity: %d\r\n",LSENS);
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
