在SLAM中如何拼接使用多个激光雷达传感器数据
为了保证激光雷达的360°环境覆盖,准备在车体上安装三个雷神16线的激光雷达,以前二后一的布局分布,大致位置情况如下所示:
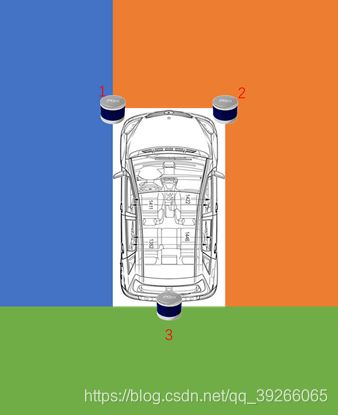
其中蓝色区域为雷达1所保留的点云区域,黄色区域为雷达2所保留的点云区域,绿色区域为雷达3所保留的点云区域,从而实现整车的周围环境的全覆盖。但是这种情况会降低了多个激光雷达的鲁棒性,万一某个激光雷达出现故障或者污渍遮挡,就会出现数据点云盲区,因此后面会尝试融合多个激光雷达的点云数据。
关于激光雷达的IP配置问题,雷神16线的激光雷达出厂默认配置ip为192.168.1.200。UDP设备包端口号2368,UDP数据包端口号2369。
使用多个激光雷达只需要使用一个交换机组成一个局域网,当然路由器也可以,配置在同一网段也就当作交换机去使用,配置在不同网段的话就需要配置电脑的网关了。这里将其配置在同一个网段中。
在同一个网段中,可以将不同的主机设置不同的IP地址用于区分,也可以使用相同的IP地址与不同的端口号去区分,这里使用第二种,即设置不同的端口号。但是要保证激光雷达的IP地址和本机IP地址不能冲突。
<arg name="device_ip1" default="192.168.1.200" />
<arg name="device_ip2" default="192.168.1.200" />
<arg name="msop_port1" default="2368" />
<arg name="difop_port1" default="2369" />
<arg name="msop_port2" default="2370" />
<arg name="difop_port2" default="2371" />
<arg name="return_mode" default="1" />
<arg name="time_synchronization" default="true" />
可在雷神激光雷达提供的上位机软件中修改激光雷达的IP地址以及端口号,具体不在详细说明,操作流程比较简单。当修改好端口号之后,就可以直接使用launch文件去同时启动三个激光雷达,在默认的launch文件中提供了同时启动两个激光雷达的启动方法,三个同理,分别启动三次node节点即可,当然每次的node节点都要给不同的命名,否则就会冲突崩溃掉。
该三个激光雷达的激光点云数据分别在其自身的坐标系下,即laser_link_left,laser_link_right,laser_link_rear。关于雷神激光雷达的坐标系据售后所说方向不确定,当前所使用的激光雷达为x轴指向雷达后方的右手系。在提供的launch文件中,可以通过修改参数:
<param name="scan_start_angle" value="0.0"/>
<param name="scan_end_angle" value="36000.0"/>
确定激光雷达的起始角度和终止角度,不过0°的方向为水平向左(以雷神标志为前方向),且没有负值,所以如果根据角度去切割的话比较麻烦。
if ((azimuth_corrected_f < scan_start_angle_) || (azimuth_corrected_f > scan_end_angle_)) continue;
因此直接在将激光点(range,angle)转换成点云数据(x,y,z)的时候,根据坐标将其过滤掉。如下所示,关于阈值就随便举个列子,根据实际情况进行调整,即可把重叠区域的点云数据过滤掉。
if(dir = "left" && point.x < x_threshold_left && point.y < y_threshold_left) continue;
if(dir = "right" && point.x < x_threshold_right && point.y < y_threshold_right) continue;
if(dir = "rear" && point.x < x_threshold_rear && point.y < y_threshold_rear) continue;
// Pack the data into point msg
new_point.x = point.x;
new_point.y = point.y;
new_point.z = point.z;
new_point.azimuth = angles::from_degrees(azimuth_corrected * ROTATION_RESOLUTION);
new_point.distance = sqrt(pow(point.x, 2) + pow(point.y, 2) + pow(point.z, 2));
new_point.intensity = point.intensity;
接下来要对三个激光雷达进行外参的标定Autoware Multi LiDAR Calibrator,使用Autoware提供的开源算法包,通过NDT算法去计算两组点云的外参。
提供一个初始的外参数,输入两组点云数据便可以得到标定的外参。做好外参标定后,设置其中一个激光雷达作为主传感器,将其余的传感器的点云数据平移旋转过去,最后点云拼接。这里以laser_link_right为主传感器。
laser_link_right laser_link_left 0 -0.7 0 0 0 0
laser_link_right laser_link_rear 1.14792 -0.362289 -0.0637275 3.1415927 0 0
当得到标定后的tf关系后,使用四元数的变换去旋转坐标值,如果使用tf的监听的话太耗时,并且这里是固定的静态tf关系,直接变换会更快。为了提高实时性,直接在生成激光点云的地方进行tf变换,即在rawdata.cc中,发布在同一个frame_id下的三个topic名称。
tf::Quaternion transform;
transform.setRPY(row, pitch, yaw);
transform = transform.inverse();
tf::Quaternion transform_point(point.x,point.y,point.z,0);
transform_point= transform*transform_point*transform.inverse();
new_point.x = transform_point.x()+transform_x;
new_point.y = transform_point.y()+transform_y;
new_point.z = transform_point.z()+transform_z;
以上为一个通过四元数进行旋转平移的模板。在使用激光点云数据时,目前是打算通过同步回调三个激光topic去使用,不知道如果对其进行拼接再发布会不会影响实时性,使其与其他传感器的时间戳不同步,有待测试!
自己的想法,后面会持续优化更新!其他大神有新的建议欢迎私信!
在使用雷神16线激光雷达的过程中发现几个问题:
1.雷神 is_dense = false,而在velodyne中是为true,不过可以在源码中直接修改。
2.在雷神中,设定的范围阈值,超过该阈值的点会被设置为NAN,就直接修改成跳过continue了。
3.雷神中的线数不叫ring,而叫lines。
4.雷神的自定义点云中并没有time。
以上不同导致不能直接适配于某些SLAM算法,需要对自定义的点云结构体进行修改。